
図書館における利用者のための書棚ガイドシステム
概要
図書検索では、蔵書データベースをキーワード等で検索するのが一般的で、単語による検索だけでなく、自然言語文による検索が可能な場合もある。その検索結果には、著者や目次情報などの本の説明、その本がその時点で貸し出し中かどうか、場合によっては、何階の何番書棚といった建物内の物理的位置に関する情報も含まれるだろう。しかし、そのような情報だけでは、実際に本がどの棚のどの位置にあるか、ということまでは直感的には分かりにくい。また、あるユーザが本をすぐに書棚に戻すつもりで一時的に持ち出しているような場合、他のユーザが図書検索の結果から建物内に本があることが分かっても、実際には本は持ち出されているため、そのユーザは目的の本を利用することができない。さらに、一般に、その時点でその本が持ち出されていることを知る手段はない。本研究では、このような状況に着目し、書棚における目的図書の物理的な位置や、自動検出された持ち出し状況などの提示といった、本の情報検索結果を表示するだけでなく、目的図書の物理的なアクセス支援までを考慮した、新しい図書検索システムを提案する。
1 はじめに
1.1 背景と目的
通常、図書館の利用において、利用者は目的の図書を入手するために、その図書のある書棚まで移動し、その書棚のどこに目的の図書があるか探す、という行動をとる。一般的に図書館では、図書がジャンルごとに整理され、そのジャンルにあった書棚に収まっている場合が多い。しかし、書棚のどこに目的の図書があるかどうかは、利用者が自分で書棚に並ぶ本の中から探すしかない。また、必ずしも図書がきちんと整理されているとは限らないため、なかなか目的の図書が見つからない場合もある。場合によっては本来の場所と異なる書棚に置かれている可能性もある。本研究ではそこに着目し、書棚のどこに目的の図書があるかを利用者に分かりやすく伝えるシステムを提案する。
なお、本論文で述べる目的の図書とは、図書検索システムなどで得られた結果の中から、利用者が入手しようとする図書のことを言う。当然、現実の図書館では、図書検索システムを利用せずに直接書棚まで行き、目的図書を探す利用者もいる。しかし、本研究の本質的なテーマは、図書検索システムと実際の書棚の本を結びつける、いわば情報世界と物理世界の統合である。そのため本研究では、図書検索システムを用いない利用者については考慮していない。
また、現在多くの図書館において、専用端末を用いたり、Webを利用して、蔵書の検索を行うことが可能となっている場合が多い。ここでの検索結果には、著者名や発行日、目次情報などに加え、現在図書館がその本を所有しているかどうかや、現在貸し出し中かどうかなどが表示される。また場合によっては、どの書棚に図書があるかも表示されることもある。しかし、この表示は実際の書棚状況を正確に表しているとは限らない。図書が間違った書棚におかれているかもしれないし、場合によっては、誰かが館内で読むために一時的に持ち出している場合もある。現在の図書検索システムでは現在の書棚情報をリアルタイムに検索結果に含めることができないためである。本研究では、このような、現在の書棚状況を図書検索とリンクする手法についても提案する。
1.2 本研究の特徴と論文の構成
本研究では、図書館の利用に際して、書棚のどこに目的の図書があるかを利用者に伝えるシステムを提案する。書棚には、図書の場所を示すためのロボットが取り付けてあり、ユーザから目的の図書の場所が知りたい、という要求がくると、その図書の場所までロボットが移動し、目的とする図書の場所を知らせることができる。
また本研究では、現在の書棚状況を図書検索とリンクする手法についても提案する。書棚から図書を持ち出したり、図書を戻したりする動作に反応して、書棚の変化を自動的に取得する。今回作成したシステムでは、書棚状況の変化を取得するためにカメラを用い、書棚手前の画像をモニタすることとした。書棚手前の画像に変化が生じれば、ユーザが本棚から図書を持ち出したり、戻した可能性があるので、書棚状況を自動で更新するのである。これにより、常に最新の書棚状況を保持することが可能となる。
以下、第2章では、本研究で必要となる図書検索システムについて述べる。第3章では、目的図書の位置を取得するためのロボットと、書棚状況と図書検索をリンクする手法について述べる。第4章では、関連研究について述べる。最後に第5章で、本研究のまとめと、今後の課題について述べる。
2 図書検索システム
本研究の準備として、まず、研究室内にある図書の検索を行うシステムを作成した。
本研究では、図書の情報的な検索を、物理的な検索に結びつけることが重要なテーマとなっており、図書検索システムは本研究で提案するシステムの土台となるものと言える。そのため、ここでは本研究で実装した図書検索システムについて述べる。
2.1 システム概要
現在、多くの図書館にはオンライン目録検索システム(Online Public Access Catalog:OPAC)と呼ばれる蔵書検索システムが利用できるようになっている。通常、OPACを利用した検索では、著者名、発行年月日などをキーワードとして、図書館に所蔵されている図書でキーワードにマッチする図書の一覧が表示される。また、他の図書館の蔵書データベースとリンクしている場合もある。その場合は、他の図書館の図書であっても、キーワードにマッチすれば検索結果に表示される。
本研究では、一般的なOPACのようなシステムと同様、キーワードによる図書検索を行うシステムを構築した。ただ、今回実装した図書検索システムは、通常の図書検索に加え、本研究のテーマである目的図書の取得に関する操作が加わったシステムとなっている。
また、図書データベースとしては、一般的なリレーショナルデータベースではなく、XML形式でデータを保存する階層型データベース、Xindiceを用いた。一般的にデータベースとして利用されているリレーショナルデータベースでなく、XMLデータベースを用いたのは、図書情報には、目次のように階層化されたデータがあり、リレーショナルデータベースでそれを扱うには、階層をテーブルに変換して登録する必要がある。それよりも、XMLであれば階層構造をそのまま登録できるため、XMLデータベースであるXindiceの方が適していると考えたからである。
しかし、現在のXindiceでは、データの検索がリレーショナルデータベースと比べて非常に遅いという欠点がある。将来はこの問題も改善されると思われるが、現時点ではXindiceの検索速度は実用レベルでないと言える。そのため、本システムではリレーショナルデータベースのPostgreSQLを用いて書誌情報の全文検索行っている。これはあくまでXindiceの検索速度の遅さに対処するための措置であり、将来、Xindiceの検索速度が向上するか、または他の検索速度の速い階層型データベースを用いることができれば、リレーショナルデータベースを用いる必要は無くなる。
2.2 データベースへの図書の登録
図書検索のためには、まず図書データベースが必要になる。今回は図書のデータベース登録に専用のGraphical User Interface(以下、GUI)を用意した。ここで入力された項目は、XMLデータとして書き出したり、Xindiceに登録することができるようになっている。また、図書の検索にはデータベースとしてXindiceを用いているため、検索で利用するためには、Xindiceへの登録が必要になる。
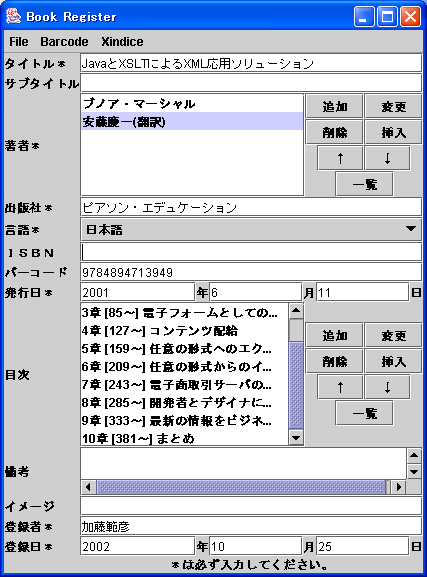
図2.1: データベースへの登録作業画面
このツールを使って以下の項目を手動で入力する。
このうち、ISBN番号を後述するロボットシステムでの本を特定するためのIDとしている。
この登録システムでは、登録済みの図書データの更新も同様のGUIを用いて行う。
更新したい図書のISBN番号を入力することで、過去に登録された情報を呼び出すことができ、再編集が可能である。また、最近の図書には必ずバーコードが記されているため、バーコードを利用することも考えた。図書データベース登録用PCにはバーコードスキャナが取り付けられており、これで図書のバーコードを読み取る事で、同様に過去の登録情報が呼び出されるようになっている。もしそのバーコードに対応する図書がデータベースに登録されてなければ、登録画面のバーコードだけが記入され、残りの項目は空白なままで、新規入力状態になる。
2.3 図書の検索
本システムでは、図書の検索はWeb上から行う。また、後述する目的図書の取得も含め、ユーザが行う全ての操作はWeb上から行うようになっている。これは、最近はPDAや携帯電話にもWebコンテンツの閲覧機能がついており、それを利用することで、システムの利用のために特別にアプリケーションをインストールする必要が無くなり、より多くの人が利用可能になると考えたからである。
図が、Web検索画面である。ここでは、データベースの全ての情報から検索ができるキーワード検索のほか、一般的な図書検索にみられるのと同様、著者名、図書名、ISBN番号などから検索ができるようになっている。また、画面の下に「書棚をスキャン」というボタンが表示されているが、これを押すことで、ロボットが動き、現在の書棚にある本の蔵書データを生成する。これについては第3章で述べる。
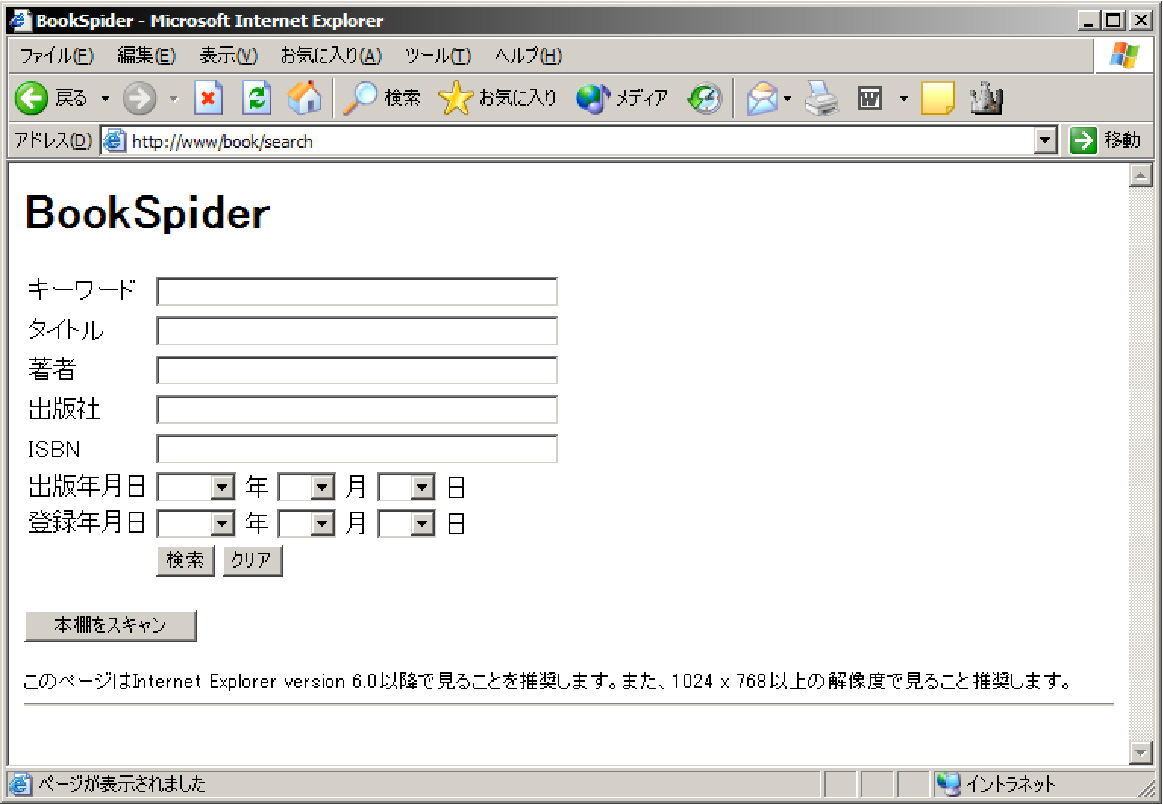
図2.2: 図書検索画面
2.4 検索結果の表示
検索の結果、目的の図書が見つかると、図ような画面が表示される。一般の図書検索システムと今回作成したシステムの違いは、「目次」ボタンと「本を探す」ボタンである。目次ボタンを押すと、データベースに登録された目次情報がWindowsのエクスプローラのようにツリー表示されるようになっている。また、「本を探す」ボタンを押すことで、書棚のロボットが動き、目的図書の場所を知ることができる。ロボットの動作については第3章で説明する。
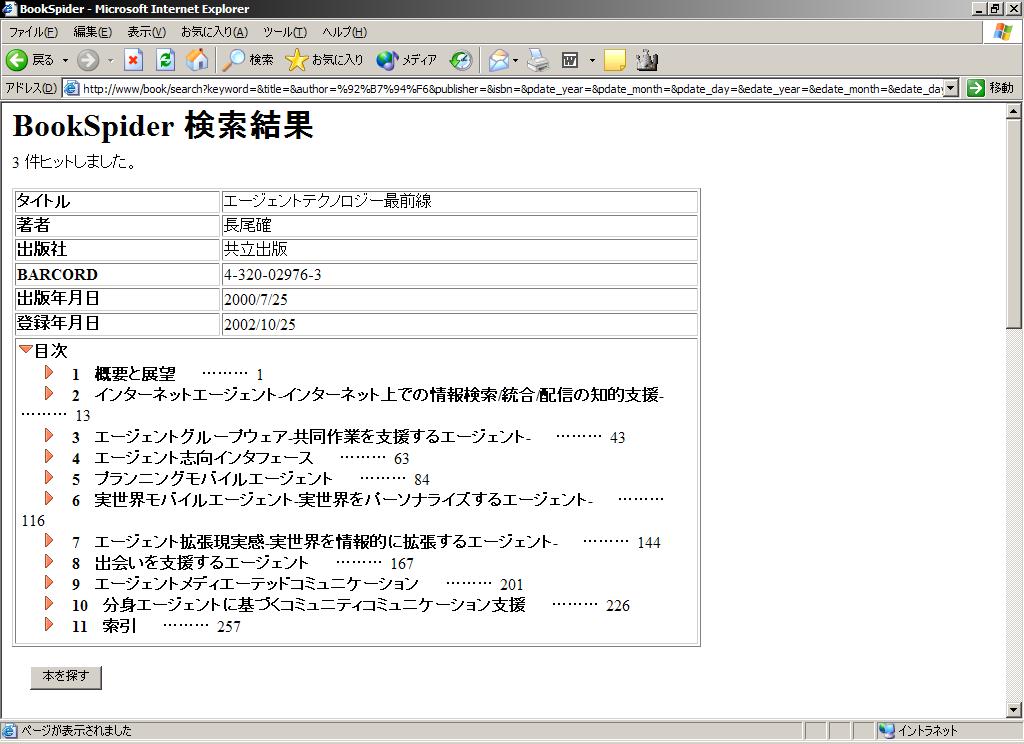
図2.3: 図書検索の結果表示
3 目的図書への誘導
今回、書棚のどこに目的図書があるかを利用者にわかりやすく伝達するシステムとして、BookSpiderと呼ばれるシステムを作成した。ここではまず、BookSpiderを構成する上で大きな要素であるRF-IDタグシステムについて説明し、その後にBookSpiderのシステムについて述べる。
3.1 図書認証のためのRFタグ
今回作成したシステムでは、RF-ID技術(Radio Frequency Identification:無線自動識別)の非接触型ICタグ(以下、RFタグと呼ぶ)を利用している。また、RFタグ以外にも、様々なタグシステムが存在する。ここでは各種タグ技術について説明し、RFタグと他のタグシステムの比較、最後に、今回用いたRFタグシステムの特徴について述べる。
3.1.1 様々なタグ技術
現在、RFタグも含め、物を識別するためのタグ利用技術として、バーコードや、共振回路やICチップを用いた無線タグを用いる手法がある。ここで、それらのタグを利用したシステムについて説明する。
-
バーコードタグシステム
現在最も流通しているタグ技術で、家電製品、食品、図書など、あらゆる物につけられている。その特徴として、印刷によって可能な技術なため、導入コストが安いことが上げられる。これまでは、扱えるデータサイズが数バイト?数十バイトと非常に少なかったが、最近はQRコードなどのような二次元バーコードも登場し、データサイズも数キロバイト程度まで増えている。しかし、印刷によるタグのため、データの書き換えができない、水や汚れ、破損に弱いなどの欠点がある。また、バーコードを読み取るリーダは指向性が強いため、バーコードをリーダの読み取り可能な方向におかなければならないという面で不便であるといわれる。
-
共振回路タグシステム
電磁波を利用してタグを識別するシステム。薄膜状のLC共振回路でできたタグを用い、アンテナから発信される電磁波との共振によるエコー波の有無によって物品の通過を監視する。利用例として、レコード店やパソコンショップなどで商品のセキュリティー管理に用いられている。これは、タグを商品に貼り付け,出入り口にアンテナを設置しておくことで、出入り口をタグのついたままの商品が通過した際に警報がなる、というものである。電磁波を用いるという点ではRFタグと似ているが、共振回路タグはあくまで回路であり、ICチップなどは付いていないためデータの読み書きはできず、また、基本的に全てのタグが同じ回路なため、個別の商品を識別する能力は低い。
-
磁気タグシステム
共振回路タグシステムと同様、電磁波を利用してタグを識別するシステム。ただし、こちらは、磁界の変化によってタグの識別を行う。タグとしては、永久磁石やコイル状の金属線を貼った紙状の物が広く使われている。このシステムの利用例も、共振タグシステムと同様、図書館や本屋などでの盗難防止が多い。特に、このシステムでは、紙媒体にタグを偽造できるため、タグをバーコードのシールに見せかけたりするなど、気づきにくいタグにすることができるという特徴がある。ただ、共振回路システム同様、基本的には全てのタグが同じであり、個別の商品を識別する能力は低い。
-
RFタグシステム
非接触で読み書きが可能なICチップを内蔵したタグを利用したシステム。電磁波を用いて識別を行うシステムだが、共振回路タグとは異なり、タグに直接データを書き込めるため、個別の商品の識別が可能となる。
また、RFタグには電池を持たない方式と持つ式がある。電池を持たないタイプでは、読取装置からの電磁波を受け、そのエネルギーを使用して電源とし、受信した情報を処理し、持っている情報を送り返す。電池がなくなる恐れがなく、便利である反面、電磁波でエネルギーを送るため、あまり距離を取れないという欠点もある。タイプによるが、数10cmが限界と言われる。逆に、数mはなれて使用する必要がある場合には電池入りのタイプを利用する。電池入りの場合の記憶容量は、数10バイトの小さなものから、数10キロバイトのものまで様々存在する。暗号化など複雑な処理をするものもあり、その場合は強力なCPUが組み込まれている。IC自体の大きさは、小さなものではゴマ粒大のものまであるが、電磁波の受け渡しを行うアンテナにある程度の大きさが必要であり、全体としてはあまり小さくすると、データの読み書き距離が短くなるため、一般にはそれほど小さくはできない。
また、現在RFタグは各国がそれぞれ独自の規格を設けて開発している場合が多く、現在統一した規格が無い。そこで、現在はMITオートIDセンタが、個別の識別番号(ID)のみを持つ非常に小さな無線ICタグをあらゆる製品に貼り付け、流通の各段階で読み取りと管理を行って物流を飛躍的に効率化することを目標とし、研究開発と標準化を行っている。
3.1.2 RFタグの利点
上記のような各種タグ技術の中から、今回のシステムではRFタグを用いたシステムを構築した。今回のシステムでは、各図書のそれぞれを識別する必要があることから、共振回路タグシステムや磁気タグシステムは適さない。そうなるとバーコードかRFタグか、ということになるが、バーコードの場合、本が薄いと背表紙に付けることができず、横に付けてしまうと、書棚に置いた時に隣の本でバーコードが隠れてしまい、読み取れなくなってしまう。これに対し、RFタグであれば、折り曲げも可能なフィルム方のタグを用いれば、薄い本の背表紙にでもつけることができる。また、本の横に付けても、読み取ることができる。
以上のことより、今回のシステムにはRFタグの利用が最適であると考えた。
3.1.3 本研究におけるタグシステムの利用
以上のような理由から、本研究ではRFタグシステムを利用することとした。現在、RFタグを用いたシステムとしては、長距離でも判別できるRFタグシステムを用いたゲートを通過した物の情報をチェックするシステムや、RFタグと同様の技術を用いたものとしてJR東日本のSuicaなどがある。しかし、これらは、物がタグリーダの領域内に入って来る、という前提のシステムである。
また、Suica同様、非接触ICを用いた製品として最近注目されているのが、ミューチップである。これは、日立製作所が発表した縦横0.4mm、厚さ0.06mmという非常に小さなサイズのタグのことである。データは書き換え不能のROMだが、データサイズが10の38乗と大きく、世の中の全てのものにIDを割り振ってもまだ余ると言われており、今後、書籍や高級ブランド品等に個別のIDを割り振るなどの利用が考えられている。
また、図書館でのRFタグの利用としては、第5章の関連研究で述べるような、蔵書管理に用いられている。

図3.1: 使用したRFタグ(omron製:V700)

図3.2: 使用したRFタグリーダ(omron製:V700-HMD1)
しかし、これらのシステムでは、タグの有無や、タグに記録された情報のみを利用している。本研究では、これらの情報利用だけでなく、RFタグの位置情報も利用したシステムを提案する。今回作成したシステムでは、タグの位置情報取得のために、接近型(読み取り可能距離:数cm)のタグリーダを用いた。接近型のタグリーダであれば、目的のタグを検知した場合、タグリーダは必ずそのタグの付近にあるはずである。これにより、RFタグを物理的対象の識別だけでなく、その位置を知る手段として利用できるようになる。
3.2 BookSpiderシステム
本研究では、前述のRFタグシステムを用いて、書棚のどこに目的図書があるかを利用者に伝えるシステムとして、BookSpiderシステムを構築した。
BookSpiderシステムとは、第2章で述べた図書検索システムと連携することで、利用者を検索された図書へ誘導するためのシステムである。システムの利用者は、図書検索で得られた結果から、簡単な操作で、読みたい図書の場所を知ることが可能となる。
3.2.1
3.2.2 BookSpiderシステム構成
今回作成したシステムは、2章で説明した図書検索システムと、書棚に取り付けられた書棚を探索したり目的図書の場所を示すためのロボット(以下、Spiderと呼ぶ)、図書検索システムからの要求に応じてSpiderを制御するPCからなる。図に、BookSpiderのシステム構成を示す。
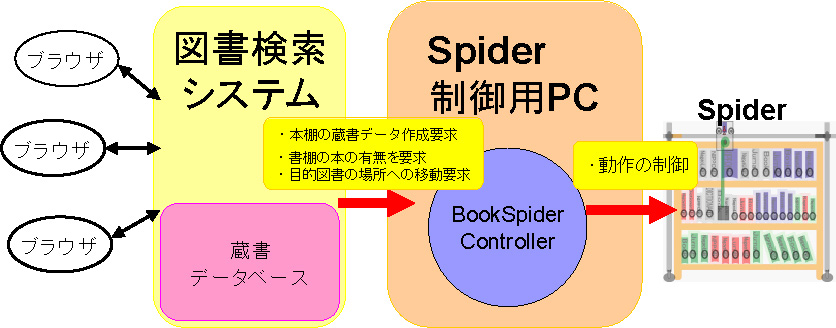
図3.3: BookSpiderシステム構成
3.2.3 BookSpiderの基本操作
BookSpiderシステムでは、基本操作として以下の3つを用いる。これらの命令が、図書検索システムからSpider制御用PCに送られる。
-
Scan
書棚に取り付けられたSpiderが書棚全体をスキャンし、現在書棚に有る本の蔵書データを生成する。蔵書データはSpider制御用PCに保存される。
-
Exists
書棚に指定の本があるかどうかをチェックする。ただし、この命令は、Scanによって生成された蔵書データベースから、図書の有無確認のみを行う。
-
Find
実際に、指定の図書の場所までSpiderを移動させる。目的図書の場所までSpiderが移動し、その前で止まる。
図書検索システムに、この3つの操作を加えた処理の流れは図のようになる。
検索画面には、通常のキーワード入力フォームの他に、「本棚をスキャン」ボタンが表示されている。これを押すことで、Scan命令が実行され、書棚の現在の蔵書データが作成される。
また、検索結果表示画面には、各図書の説明の下に「本を探す」ボタンが表示される。これを押すことで、まずExists命令によって蔵書データに目的図書があるかどうかが調べられ、目的図書が蔵書データにあれば、Find命令が実行されて、Spiderが目的図書の場所へ移動し、その場所を知ることができるのである。
現在のシステムでは、Find命令によって目的と書の場所までSpiderが移動すると、Spiderが図書の目の前にあるため図書が取れない。そこでSpiderに取り付けられたスイッチを押すことで、Spiderが横に移動し、図書を取れるようになっている。
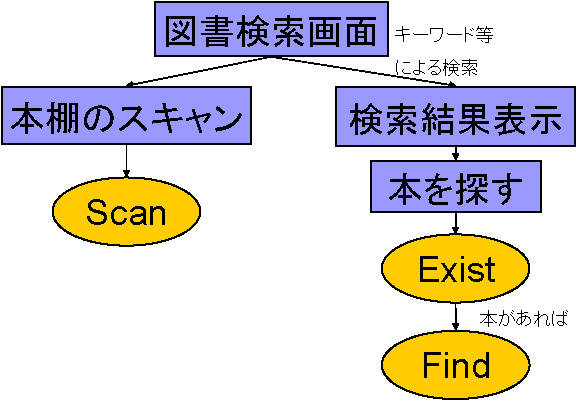
図3.4: 図書検索システムに基本操作を加えた流れ
3.3 Spider: RFタグ読み取りロボット
Spiderとは、書棚に取り付けられたロボットで、書棚にある本をスキャンする機能と、ユーザから本を探す要求が来た際、目的の本のある場所まで移動し、ユーザにその場所を伝える機能を持つ(図)。
Spiderの移動に関する部分は以下に述べるLEGO MindStormsと呼ばれるブロックキットでできており、モータやセンサを制御するRCXと呼ばれる赤外線通信機能を持ったコントロールボックスが、、IRタワーと呼ばれる赤外線端末を介してシリアルケーブルでPCと接続されている。
また、Spider制御用PCにはRFタグリーダもシリアルケーブル接続されている。実際にそれらの制御を行うプログラムがBookSpiderControllerで、タグリーダに対しての読み取りON/OFF命令や、RCXへのSpider動作、センサ読み取りの命令を行うなどの機能を持つ。
3.3.1 Spiderの実装
前述の通り、Spiderの作成に、LEGO MindStormsと呼ばれるブロックキットを用いた。これは、LEGOのブロックキットに、モータや光センサ、回転角度センサと、それらを制御するRCXというコントロールボックスなどで構成されるキットである。ユーザは、RCXに自分の作成したプログラムをダウンロードし、実行させることができる。
また、MindStormsには標準でプログラミング環境が整っている。しかし、標準のプログラミング環境は子どもでも使えるように作られているため、簡単である反面、あまり複雑な処理ができないという問題がある。そのため、本研究では、MindStorms用に様々な開発者によってMindStorms用のJAVA API が数多く公開されているため、それらを用いることとした。本研究で用いたAPIは、RCXコントロール用にleJOSと呼ばれるJava環境、PC-RCX間の通信に、RCX Java API と呼ばれるAPIである。
3.3.2 Spiderの動作
Spider自体は制御用PCからの命令に応じて上下移動や、センサの読み取りを行うロボットである。
移動については、モーターでタイヤを回し金属パイプを横方向に移動。また、光センサでパイプに張ってあるカラーマークを感知することで両端を認識するようになっている。縦方向は、テグスの巻取りになっていて、回転角度センサから回転数を取得し、高さを計算している。本棚の各段の高さごとに値が設定してあり、Spiderの動作時には、Spider制御用PCから、指定の高さで停止するように命令が送られる。
また、テグスの先端にはタグリーダが取り付けられており、これがON状態の時にはRFタグに記録された本のIDを読み、本の場所を知ることができるようになっている。タグリーダがRFタグを認識すると、Spider制御用PCにそのIDが送られるようになている。本システムではIDとして本のISBN番号を用いている。図書館などでの利用の際には、各図書に登録番号がつくことがほとんどなので、それを本のIDとするべきであるが、現在は研究室内の図書のみを扱っており、同じ本はないという前提条件で製作したため、本ごとに設定されているISBN番号をそのIDとして利用した。
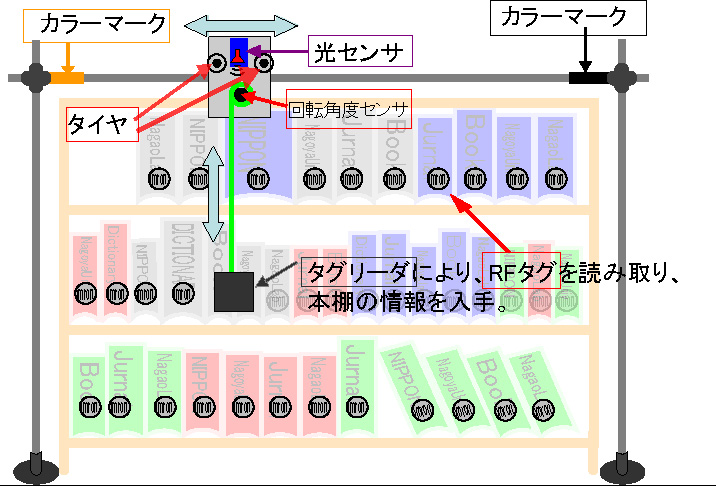
図3.5: Spider
3.4 図書検索から目的図書の取得まで
3.4.1 システム側から見た処理の流れ
本研究で構築したシステムの関係を図に示す。BookSpider制御用PCと、前述した図書検索システムとは、サーバ-クラアントの関係になっており、図書検索システムがクライアントとなって、サーバ側であるBookSpiderへ要求を送る。BookSpider制御用PCはその要求に応じてSpiderを動かし、結果を図書検索システムに返す。
このような流れにより、BookSpiderシステムは、図書検索から、実際の本の位置までのSpiderの移動を行っている。
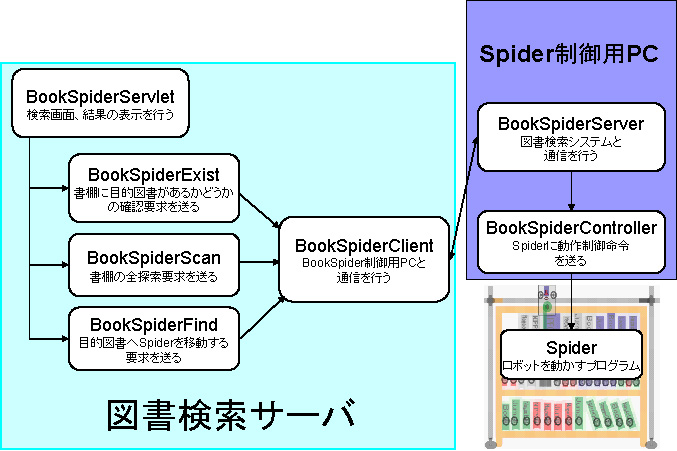
図3.6: BookSpiderシステム関係図
3.4.2 利用者から見た処理の流れ
前述の通り、システム利用者は全ての作業をブラウザ上で行うことができる。まず、図書検索画面では、キーワードを入力することで検索を行う事と、「本棚をスキャン」ボタンを押すことで蔵書データを生成することが可能である。検索結果の表示画面では、入手したい図書の「本を探す」ボタンを押すことで、その図書の場所までSpiderが移動する。
そのままでは、Spiderが図書の目の前に停止してしまっているので、図書を取り出す邪魔になってしまう。そこで現在のシステムでは、Spiderに押しボタンスイッチが取り付けてあり、それを押すことでSpiderが横に移動する。これで、利用者は図書を入手することができるのである。
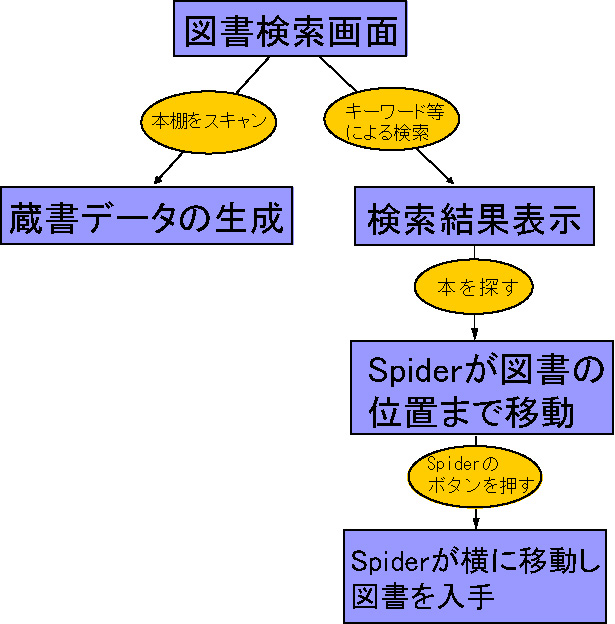
図3.7: 利用者から見た処理の流れ
3.5 書棚状況の認識と利用
これまでで述べてきたBookSpiderのシステムでは、蔵書データを参照することで、ExistsやFindの命令を処理している。しかし、このシステムでは、蔵書データが、本当に現在の書棚データであるという保証はない。書棚から本が持ち出されたり、逆に書棚に戻された場合、当然書棚にある本の状態は変わってしまうが、このシステムでは、それを認識することができないからである。そこで、書棚状況が変化した際に、新しい蔵書データを生成する必要がでてくる。
この問題の解決方法として、書棚の状況をモニタし、書棚状況の変化に応じて自動で書棚のScanを実行することで、常に最新の書棚状況を保持することを考えた。
3.5.1 書棚のモニタに用いる手法
書棚状況のモニタを行う手法として、以下のように複数の手法が考えられる。
-
赤外線センサや光センサの利用
センサを書棚の手前に設置する。本を取り出したり戻したりする際に光が遮断されるため、それにより書棚状況の変化が検知され、書棚のScanを行うことが考えられる。各棚の位置に合わせてセンサを取り付けることで、どの棚に変化があったかまで知ることができる。
-
圧力センサの利用
圧力センサを書棚の各棚に取り付けることで、書棚から図書を持ち出したり戻したりした場合の棚の重量変化を検知して、Scanを行うことが可能となる。このシステムでも、棚単位での検知が可能である。
-
カメラの利用
書棚をカメラでモニタする。画像に変化があれば、書棚付近への人の接近と認識し、Scanを行うことが可能である。
以上のようなモニタ方法の中で、圧力センサによる重量のモニタや赤外線・光センサによるモニタであれば検知の精度は高くなる。しかし、実装が複雑であり、現在では設備にかかるコストが高い、という点が問題となる。そこで、今回は以下のような、カメラを用いて、入力画像をマトリクス型の領域を設定し、その画像の変化を利用する方式でモニタを行うこととした。
3.5.2 カメラによる書棚のモニタ
今回のシステムでは、PCに接続されたカメラを書棚に設置し、書棚をモニタすることを考えた。ここで、書棚の正面からモニタを行うと、人が書棚の正面を通っただけでも検知してしまうため、実用的でない。そこで、モニタは書棚の横方向から行い、書棚手前の画像の変化を検知することを考えた。書棚の横に設置したカメラからの入力画像は図のようになっている。

図3.8: 書棚横に設置したカメラの画像
この入力画像に対し、本システムでは、書棚の高さごとに持ち出しを認識することを考えた。図のように、書棚の各段の高さにあわせてカメラの入力画像に領域を設定した。各領域に何か動作があれば、その段に本の持ち出し、返却が発生したと考えられるので、その段に対して自動的に再スキャンが行われる(図)。
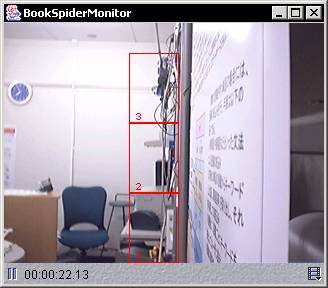
図3.9: 各段ごとで領域分けした画像
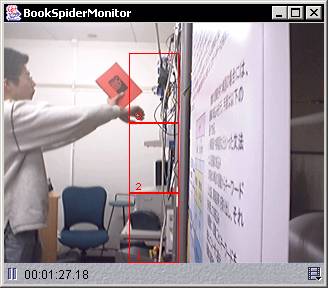
図3.10: 最上段に動作が検出された瞬間の画像
4 関連研究
本章では、現在の図書館におけるRFタグの利用など、関連研究について述べる。
4.1 図書館におけるRFタグの利用
図書館でのRFタグの利用としては、蔵書管理のためにRFタグを利用したシステムが存在する。これは、現在磁気タグシステムを用いて実現されている盗難防止機能とバーコードによる蔵書情報の読み出しを行う作業をRFタグのみで実現しているシステムである。このシステムでは、蔵書管理と盗難防止を目的としてRFタグを利用している。
このシステムでは、RFタグをバーコードと磁気タグの二つの機能を併せ持った物として利用している。しかし、本研究のような、RFタグから図書の位置情報を取得しようというシステムではない。
4.2 Ubiquitous Talker
Ubiquitous Talkerは、物理的な対象と情報を統合するシステムであり、その一つの応用例として、書棚に並ぶ図書の中から目的の図書を探し出すシステムを試作している。このシステムでは、図書のIDとしてバーコードを用い、CCDカメラを用いて図書の特定を行う。また、ユーザはシステムと音声による対話を行い、ユーザの要求を満たす図書までの誘導や、図書の内容説明を音声と携帯型のディスプレイによって受けることができる。
Ubiquitous Talkerでは、バーコードの認識にCCDカメラを用いることで、複数のバーコードを、位置情報と共に認識することができる。これは、バーコードが、形状によって識別を行う事の利点であるとも言える。しかし、見えない位置にバーコードが隠れてしまえば、このシステムではその図書を見つけることができない。逆に、RFタグシステムは見える場所にタグがある必要は無い。タグリーダの検知可能な範囲にタグがあればよいのである。その意味でRFタグはバーコードよりも物理検索システムに向いていると言える。しかし、前述したとおり、RFタグシステムは本来位置の検出ができない。BookSpiderシステムでは、接近型のタグリーダを用いることで、位置情報の取得を実現したが、逆に接近型であるために、図書の置き方によっては、タグが検出できない、という問題もある。
また、Ubiquitous Talkerでは、BookSpiderとは異なり、音声対話による検索が可能となっている。BookSpiderでは、Webブラウザからの利用を想定しているが、音声による検索支援や、目的図書への誘導が行えれば、より利用者の使い勝手は向上すると思われる。
4.3 電子図書館システム
電子図書館システムとは、全ての図書情報を情報世界のみで扱うシステムである。実際に運用されているシステムとしては、青空文や、国立国会図書館の電子図書館等がある。青空文庫は、過去の文庫作品の中から、著作権保護機関の過ぎたものをテキストデータとして記録し、無料で公開しているシステムである。国立国会図書館の電子図書館では、彩色資料などの重要文化財や過去の有名な書籍を、全て画像データとして保存してある。
このような、図書情報のデジタル化が進んでいけば、いつかは現在の図書のような紙媒体は無くなるとも言われてい。しかし、現存する紙媒体のデータは膨大であり、それらが全てデジタル化されるのはかなり先の話であると思われる。そのため、本研究で提案したような、その膨大な量の紙媒体から目的の図書を見つけ出すシステムは今後も十分に活用する場があると考えられる。
4.4 自動書架システム
本研究で提案した手法では、検索対象となる図書の入手のために、利用者に対して書棚のどこに読もうとしている図書があるかを分かりやすく伝達する手法を提案した。これに対し、自動書架システムでは、書棚は完全に無人化されており、PC等、端末からの検索要求に応じて、自動で図書を取り出し口まで運ぶ。利用者は端末の前で待っているだけで、図書を手に入れることができるのである。
ただ、図書館では、一度に何十、何百の利用者が図書を探している。しかし、自動書架システムの場合、端末の数に制限されてしまうため、端末数を超える利用者に対応することが難しいという問題がある。
5 おわりに
本章では、本研究のまとめと今後の課題について述べる。
5.1 まとめ
本研究では、書棚のどこに目的図書があるかを利用者に伝えるための方法として、RFタグと接近型タグリーダを用いたロボットを用いることで本の位置を特定し、ユーザに伝えるBookSpiderシステムを提案した。これにより、図書検索の結果から、ユーザの目的の図書の場所を物理的に示すことが可能となった。
また、BookSpiderの持つ書棚の蔵書データをリアルタイムにモニタする手法として、カメラによるモニタを提案した。これにより、人の手により行っていた蔵書データ生成のためのScan操作を自動で行うことができるようになった。赤外線センサ、圧力センサを用いたモニタであれば書棚の変化の検出精度は高くなると思われるが、問題点として実装の際のシステムでは複雑化、高コスト化になるため、今回は、実装の面でのメリットがあると思われるカメラによるモニタを行った。実験の結果を見る限りでは、誤認識が多いなど検出精度の面で問題がある。しかし、BookSpiderシステムは将来的にSpiderのロボットを書棚に内蔵し、ユーザの見えない部分で各棚ごとにスキャンが可能となることを想定している。そのため、誤認識によってスキャン回数が多くなることはそれほど問題でなはいと考えている。逆に、現状ではカメラによるモニタが他のセンサを用いた場合よりもコスト的なメリットが高く、また、複雑な画像処理を行わないのであればセンサを用いた場合よりもシステムが複雑でないため、より実用的であるとも考えられる。
5.2 今後の課題
本研究で、今後反映していく予定のシステムとして、建物全体を想定したユーザの誘導、図書の貸し出しの自動化、関連した図書の自動取得を想定している。以下、これらについて簡単に考察する。
5.2.1 建物全体を想定したユーザの誘導
現在のシステムでは目の前に書棚があるという前提のシステムである。しかし、実際の利用環境では、検索する場所が書棚の目の前であるということは考えにくい。そのため、今後は図書館などの建物全体を想定した、入り口から目的図書のある書棚への誘導についても考慮する必要がある。
各ユーザがPDAのようなWebブラウズ可能な携帯端末を持っていると想定すると、その画面に書棚の位置情報を表示させることが考えられる。
5.2.2 図書の貸し出しの自動化
この研究の目的の一つは、これまでの図書検索に、物理的側面、つまり人の行動を考慮した検索を可能にすることである。現在は、図書検索結果から、本を取得するまでの機能と、書棚の変化によって、自動的に蔵書データを更新する機能を持ったシステムだが、今後は、本の貸し出しについてもBookSpiderで行えるようにしていく予定である。
貸し出しは、一般的にはユーザが借りたい本を貸し出しコーナーに本を持って行き、手続きをすることで行っている。一部図書館では、ABC(Automatic Book Circulation)と呼ばれる、人の手を介さない自動貸し出しのシステムも存在するが、借りたい本をシステムのある場所まで持って行かなくてはいけない点は、人の手を介しての貸し出しと同じである。
ここに、本研究で作成したBookSpiderシステムを利用することを考える。現在のシステムでは、ユーザの目的図書の場所までロボットが動いて、ユーザにその場所を伝えることができるようになっている。当然この時点で、システムはユーザが要求した本を知っている。そこで、最も簡単な方法として、ユーザはPDAや携帯などを利用して検索を行うと考え、ユーザが検索に使用している端末の画面に「図書の貸し出し」ボタンを付ける方法が考えられる。また、前述の書棚にタグリーダを取り付けた場合と同様、端末にRFタグリーダやバーコードリーダを取り付けることで、端末単体で図書の貸し出しが可能となる。
BookSpiderを利用する利点は、図書の検索、図書の入手、図書の貸し出し、という流れを全てそのシステムの中で行うことが可能となる、という点である。これまでのシステムでは、検索と貸し出しについての自動化は行われてきたが、その間に図書の入手という、物理世界の行動が入っているため、これまで別々に論じられてきた。そこに、本研究で提案したBookSpiderシステムを導入することで、その全てをひとつにまとめていけるのではないかと考えている。
5.2.3 関連図書の自動取得
現在の図書検索システムは、各図書のデータを独立して扱っている。しかし、一緒に借りられる頻度や、それぞれの図書の内容の類似性などから、図書同士の関連性を計算することができるのではないかと考えている。図書の類似性とは、一般に図書館で行われているジャンル分けによるものだけでなく、目次などの図書情報の中に、ある特定の図書にしか存在しない語句があれば、それらの図書の関連性が高いと推測できる。また、GETA(Generic Engine for Transposable Association)のような、文書の類似性を計算するシステムを利用することも考えられる。
ただし、関連する図書を見つける場合、通常の図書検索システムであれば、蔵書データは基本的に変化が無い。そのため、図書情報の登録時に、図書内容から、他の図書との関連度をあらかじめ計算しておき、それを検索結果に含めることが可能である。しかし、本研究では、検索の対象が書棚であり、利用者の図書持ち出し・返却により、常に書棚状況が変化する。そのため、利用者からの要求が来たときに、システムが現在書棚にある図書の中から関連度の高い図書を自動的に判別する必要がある。
そのための手法として、図書データのアノテーションを行うことが考えられる。図書の著者、目次情報、書かれている内容をあらかじめメタデータとしてデータベースに登録しておき、ユーザからの要求に応じて、そのメタデータから、関連度を求めるという手法である。
これらの手法によって、関連度を計算することで、関連図書を見つけることができると考える。例えば、書棚のある図書を手にとって、ふと関連した図書も見たい、と思ったとする。その時には、Spiderのタグリーダにその図書をかざすことで、BookSpiderシステムが図書のメタデータから自動で関連図書を見つけ出し、その場所まで移動するようなシステムが考えられる。
謝辞
本研究を進めるにあたり、指導教員である鳥脇純一郎教授、目加田慶人助教授、森健策助教授、平野靖助手には研究の基礎的な考え方から、ディスカッションを通して貴重なご意見を多数いただき様々な面でお世話になりました。さらに、長尾確教授には、ミーティングやディスカッション・論文指導にコンセプトメイキングなど、研究室の枠を超えて様々なご指導を賜り大変お世話になりました。
また、鳥脇研究室の諸先輩方にもディスカッションなどで様々なご意見をいただくなど、大変お世話になりました。
さらに、長尾研究室の梶克彦先輩・山根隼人先輩には、論文の書き方や研究の仕方・ミーティングでの助言はもとより、研究生活面でも生活環境の充実や行事などを通して楽しい研究室作りをもしていただき、大変お世話になりました。
研究室環境の充実といえば、長尾研究室秘書の兼松英代さんには通常の秘書業務に加え、英語の添削や、おいしいコーヒーやお菓子を差し入れていただいたり、部屋の掃除やその他細かな心配りをしていただき非常に感謝しています。
慶応大学の福岡俊樹様には論文の謝辞の書き方を教えていただきお世話になりました。
そして、困ったときにいろいろ助けてくれた鳥脇研究室のB4である、今井直史君、江間 慎弥君、小栗 崇治君、河野 良輔君、小玉 晋也君、小南 光君、二浦尾 晃司君、松ヶ野 修功君にも研究面、生活面共に非常にお世話になりました。
また長尾研究室のB4の皆様にも非常にお世話になりました。松浦真治くんにはサーバやデータベースの実装など、様々な面で助けていただきました。さらに、清水敏之君、山本大介君、細野祥代さんには研究面、生活面両方でいろいろお世話になりました。
最後に、拙いながらも大学で論文をかけるまでに育てていただいた両親にも、最大限の感謝の気持ちを表します。
ここに書ききれなかった人達も含め様々な人達のおかげで今の自分があり、この論文を書くことができたと思っています。
ありがとうございました。