
個人用知的移動体における移動体間通信と連携協調動作
1 はじめに
人が意識することなく身近に情報端末が存在する環境が近い未 来に実現すると思われる。そのひとつが、情報環境が人と共に移動するというスタイルであ る。人とコンピュータが一体化して行動するようになれば、よ りスムーズに情報とリンクすることが可能になる。
物理的・情報的にバリアフリーな社会を実現するため、ATと呼ばれる新し い個人用電動移動体を設計、開発した。AT (Attentive Townvehicle)は、 人間の都市生活をより快適でより楽しくする、人間中心の 乗り物である。また、搭乗者である人間や、AT自身を取り巻く環境に適応 し、個体間通信によって協調的に動作可能である。 本研究では、情報技術による移動体同士の新たな関係に着目した上で、 移動体間通信とそれを用いた連携協調動作について述べる。
2 個人用知的小型移動体
ATの駆動系には電動車椅子用のモータと車輪が利用されており、車体はアル ミ材で構成されている。また、ATは足で操作するようになっているため ペダルの裏には傾斜センサが左右1つずつつけられ、ペダルの角度データ を車体後部に設置されている制御用PCに送っている。さらに、進行方向や道 の勾配を計測するための3軸センサも車体に取り付けられている。そして、 前後左右の障害物に対応するため超音波センサが車体前後に左右1つずつ 取り付けられている。これにより障害物を検知すると、制御用PCから駆動系 に対して減速するよう指示がなされる。また、車体前後には衝突時の衝撃を 抑えるためにバンパーが取り付けられており、バンパーに物体が接触すると 即座に走行を停止する仕組みになっている。さらに、車体前部にはRFタグの 情報を読み取るためのタグリーダが取り付けられている。これによってATは 走行中に外部世界の情報を取得することが可能となる。
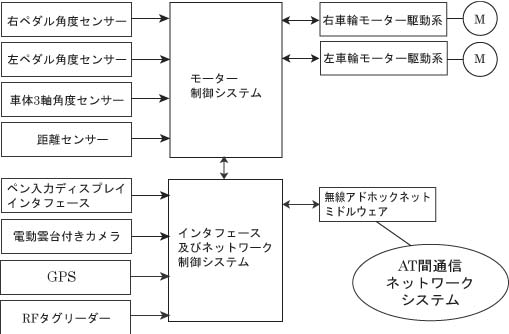
図1: ATのシステム構成図
ATにはタイプAとタイプBがあり、タイプAは立ち乗り専用、タイプBは立ち乗 り・座り乗り両用となっている。タイプAはコンソールとしてタブレッ トPCが使われているが、タイプBはPDAが用いられている。
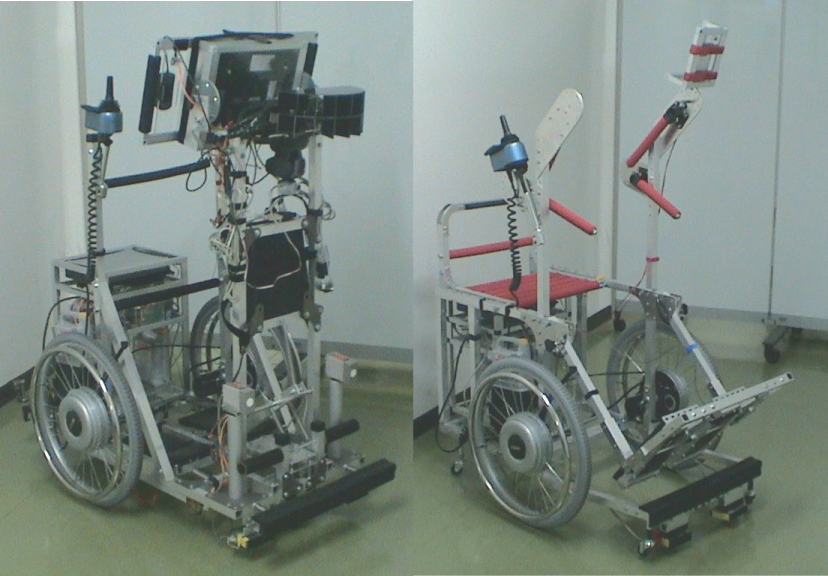
図2: タイプA(左)とタイプB(右)
移動体同士が相互に通信を行うことによって、複数台の移動体が協調的な振 舞いをすることが可能になる。例えば、先導する移動体に制御を移譲する ことにより実現する隊列走行や、近距離に存在する移動体同士が進行方向を 伝えることにより接触などの危険を回避することなどが挙げられる。また、移動体と人間の間に通信が介在することにより、今までにない新たな関係が構築可能になる。例えば、操縦者の携帯端末による移動体の遠隔操作や、移動体を離れているときに操縦者に異常を伝えたりすることなどが挙げられる。
3 AT間相互連携
AT間アドホック通信を行うにあたり、cogmaを利用した。これを使うことにより、AT同士が互いの存在を検知し、相互通信を行う環境を作り上げることが容易になる。 本研究では、移動体同士の相互通信により前方を走行する移動体を自動的に追尾するシステムを実 装した。自動追尾を実現する手順は以下の通りである。
-
前方を走行しているマシンは走行データの記録をと る。具体的には、左右の車輪の回転数から計算された走行距離、左右 の車輪の回転速度、3軸角度センサのyaw(方向)値、走行モードである。
-
前方のマシンが走行データを後方のマシンに送信す る。このデータはキューに貯められる。
-
前方のマシンが追尾開始の信号を送ると、後方のマ シンはキューからデータを取り出す。
-
取り出されたデータを基に、後方のマシンが前方の マシンの追尾を開始する。具体的には、走行モードが「直進」ならば左右 の平均距離と自分の距離の差だけ直進、「回転」ならば現在の自分の yaw値と走行データのyaw値の差だけ回転する。
-
前方のマシンが停止すると走行データの送信が終わ る。後方のマシンはキューから取り出すデータがなくなると追尾を停止する。
自動追尾を行う際は、前方のマシンは回転と前進・後退を同時に行うことはで きないようになっており、「直進」モードと「回転」モードのどちらかの状 態を維持しながら走行することになる。
4 ATと個人の通信
前述のように、タイプBのコンソールはPDAであり、情報を人間に提示するインタフェースとして の役割を果たしている。また、PDAは人がATを操作するツール という役目も果たしており、人とATとを結ぶ接点になっている。自分が所有している(自分のデータが 保存されている)PDAを使って、任意のATと組み合わせて利用することができ るということは、いつ・どこでATを利用しようとしても常に自分用にカスタマイ ズされた状態で操作可能であることを示している。つまり、これまでの運転情報の履 歴や個人の嗜好などのデータがPDAに蓄積されることにより、使えば使うほ ど乗り物が人に馴染んでいくことになる。このような方法で乗り物が人に 適合していくことになる。
ATはタグリーダを用いて現在地の情報を取得することができる。この情報の中には、その 地点からある地点までの地図情報が記述されており、その情報に従って走行 することにより目的地に到達することが可能となる。地図情報には、現在地か ら目的地までの道筋に関する方向と距離が記述されており、この情報を用いた ATの自動走行システムを実装した。自動走行を実現 する手順は以下の通りである。
-
タグリーダでRFタグを読み込むことにより、現在地の情報をどこ から取得するかを知る。
-
現在地の情報を保持するサーバにアクセスしXML化 された情報を取得する。
-
目的地に存在する人間が携帯端末を用いて、その 場の情報を取得しATに送信する。
-
与えられた目的地までの経路情報をXMLから取り出し、それに基づいて自動走行を開始する。
-
途中に通過すべき場所(チェックポイント)を確認し ながら目的地に向かう。チェックポイントを発見できない場合は、予定さ れた経路から大きく外れたと判断し停止する。
-
すべてのチェックポイントを通過して目的地に到達 することで自動走行は完了する。
5 おわりに
電動車椅子を用いて自律的な走行や協調的な振る舞いを実現しようとする試 みとして知的車椅子が挙げられる。また、情報通信 技術を用いて一人で自由に移動しながら、みんなと楽しくコミュニケーショ ンもできる、という新しいモビリティ社会を提案する一人乗りのパーソナル・ モビリティの開発も進められている。
移動体同士がアドホックなネットワークを形成し、 お互いの情報をやり取りすることによって、 協調的な動作を容易に実現することができる ようになると考えられる。また、個人と乗り物が情報を介してつながりを持 つことによる新たな可能性もある。これらの技術が将来の移動体間通信技術 を使ったサービスには必須になるのではないだろうか。
今後は、移動体が自分の情報を他の移動体に伝えることにより、移動体同士 がお互いの意思を理解することが可能になり、安全対策や情報の共有・交通 渋滞の解消など、人と乗り物を含めたコミュニティ全体としての問題解決の 手段の1つとして発展することが望まれる。