
個人用知的移動体における移動体間通信と連携協調動作に関する研究
概要
われわれは、物理的・情報的にバリアフリーな社会を実現するため、ATと呼ばれる新しい個人用電動移動体を設計、開発している。 AT (Attentive Townvehicle)は、人間の都市生活をより快適でより安全にすることを目指した、情報技術によって強化された 乗り物である。 また、搭乗者である人間や、AT自身を取り巻く物理的環境に適応し、AT同士の通信によって協調的に動作可能である。
ATは、アドホックネットワークによる移動体間通信を行い、センサー情報を含む多くの文脈情報を交換することにより、 これまでより高度な複数台協調動作が可能になる。 具体的には、先導するATの情報を後続のATに伝達することで実現するプラトゥーン走行(隊列走行)や、 位置と方向などの情報を近接するAT間で交換して行う衝突回避などが挙げられる。
また、ATはPDAなどの携帯情報端末を通して人間とのインタラクションが 可能であり、ATからの情報を人間に提示したり、人間からの要求に基づいて 情報検索や移動を行うことができる。また、PDAをリモコンとして利用する ことによりATの遠隔操作が可能になる。
さらに、環境からの情報取得も可能であり、さまざまな場所に設置された RFID (Radio Frequency Identification)タグを利用する ことで、現在位置や近接する対象、他の地点への経路などの情報を、RFIDに関連付けられた、ネット上の情報サーバーから取得する ことができる。 位置や経路情報をサーバーから得ることによって、ATの無人走行が実現できる
このように、移動体と通信を密に結びつけることで、ATはこれまでにはない情報世界と物理世界の連携プラットフォームとしての 役割を果たす。 本論文では、ATに関する基本的な構造や機能、アドホックネットワークを通して通信を行うことにより実現可能ないくつかの 応用例について述べる。
1 はじめに
情報化社会の到来により、様々な情報サービスが提供されるようになり、物理世界と情報世界がより密接な結びつきを持つように なってきている。 そのため、人が意識することなく身近に情報端末が存在する環境が、近い将来に実現されると思われる。 その一つのあり方として、人が情報端末を持ち歩くという発想ではなく、情報環境が人と共に移動するというスタイルが考えられる。 つまり、人とコンピュータが一体化して行動することができれば、日常世界をよりスムーズに情報世界とリンクすることが可能になる。
そこで、われわれは、物理的・情報的にバリアフリーな社会を実現するため、ATと呼ばれる新しい個人用移動体を設計、開発している。 AT (Attentive Townvehicle)は、人間の都市生活をより快適でより安全にすることを目指した、情報処理と運動を密に連動させた乗り物である。 ATは、自動車やバイクなどと異なり、屋内と屋外の両方で利用されることを想定している。 また、搭乗者である人間や、AT自身を取り巻く環境に適応し、個体間通信によって協調的に動作することが可能である。
ATは、一種の移動型情報マシンであり、移動体そのものが情報世界と現実世界の融合を目指して設計されている。 つまり、情報端末を持ち歩くのではなく、情報端末に乗り込んで共に移動することで、情報世界と実世界をスムーズにリンクできるようにする。 物理的文脈を考慮しつつ、個別の人間にカスタマイズされた情報処理を行うことによって、その人にとって最適な情報環境が 形成されるのである。 これにより、いつでもどこでも自分が必要としている情報を容易に入手することが可能になる。 また、ATが物理的環境と搭乗者を考慮して、搭乗者に最適な情報を能動的に選択して提示することも可能である。
ATが情報マシンであることのもう一つの利点は、AT間の通信によって情報交換が行えることである。動的環境での移動体間通信のために、 われわれはサーバーや固定アドレスを前提としないアドホックネットワークを採用した。 これによって、AT間の臨機応変なネットワークが生成でき、必要に応じてお互いの状態を伝達し合うことができる。 このような動的なネットワーク上でのコミュニケーションによるAT間の協調的行動の一例として、 一方のATの位置や方向や速度のような状態をもう一方に伝達し、相手の状態に自分の状態を近づけることで実現する、 プラトゥーン走行(いわゆる隊列走行)がある。複数のATが同様の処理を行うことで、高度な群制御に発展できる。 また、人間が持つ携帯情報端末とATの間のアドホックネットワークによって、搭乗者以外の人間がATの遠隔操作を行うことが可能になる。 これによって、人間がATを介して遠隔の物理的環境に関する情報が得られるだけでなく、遠隔の物理的状況に影響を与えることもできる。 ATを介して、複数の人間が情報共有を行うこともできるようになるだろう。これは、人間と乗り物との関係をさらに発展させることにつながる。
以上のことが、現実的に意義があることであることを確認するために、 2種類のATを製作し、無線アドホックネットワークによる複数のAT間の協調、ATと環境のインタラクション、そして人間とATのインタラクションに関する実験を行った。 これらの試みは将来的な移動体情報通信システムの先駆的実験となると考えられる。 本論文では、情報技術による、移動体と環境、移動体同士、人間と移動体の新たな関係に関して行った実験や考察について述べる。
以下、第2章では、ATの基本コンセプト、システム構成、ATの種類と機能、ATの操作方法ついて述べる。 第3章では、ATと環境とのインタラクションに関して、センサー類を用いた走行時の情報取得とその利用について述べる、 第4章では、AT間のインタラクションに関して、無線アドホックネットワークを用いた移動体間通信と、それを利用した自動追従システムについて述べる。 第5章では、ATと人間のインタラクションに関して、携帯情報端末を用いた人間とATの間の通信と、それを利用した遠隔操作、地図情報に基づく自動走行システムついて述べる。 第6章では、関連研究について述べる。 最後に、第7章では、本研究のまとめと今後の課題について述べる。
2 個人用知的小型移動体AT
2.1 ATのコンセプト
ユビキタスというキーワードが巷に溢れている反面、日常世界と情報世界の融合、つまり、人間が生きて生活している世界と機械的な情報処理が行われている 情報世界との密な連携は、未だ十分には実現されていない。 たとえば、現在の情報技術では、いつ・どこでも自分の本当のニーズに応じた情報をアクセスできる 状態にはなっていない。 これは、日常世界と情報世界の接点として、現在の情報端末や情報サービスは、まだまだ日常生活において十分な 働きをしていないことを示している。 いかにして、人間の意図や行動と情報をうまく結びつけることができるか、ということは近年の重要な課題の一つとなっている。 この問題に対するひとつの回答として、モバイルコンピューティングが挙げられる。しかし、現状では多くの人が情報端末を持ち歩くとしても PDAや携帯電話などが許容範囲であると考えられる。そして、高度な情報サービスを提供しようと考えると これらのツールで実現できることには限界がある。 このような観点から考えると、人が自然に情報環境と一体化することは非常に難しいことである。 そこで、本研究では日常環境と情報環境を密接につなぐために、人間が情報と一体となって行動することを提案する。 その一つの実現形態として、情報化された乗り物が考えられる。 ATはそのような乗り物として開発された。これを利用することによるアドバンテージとして常に情報世界にアクセスする環境が整えられていることが挙げられる。 つまり、人間が意識せずとも必要とする情報を探し求めることが可能になり、自分に最適化された情報環境を 形成することができる。
これまで、移動体と個人の関係が情報処理の観点から述べられる機会はあまりなかった。 これは、それらの間の関係を考える必要性が十分に認識されていなかったためであり、また、そのような関係を考察するための 具体的な手段も用意されていなかったためである。 ATのような、これらの関係を考察し、実験できるプラットフォームが提供されたことで、移動体・人間、さらにそれをとりまく 情報的・物理的な環境との関係について深く考える機会が与えられた。 ここで考えるべきことは、先にも述べたように「人間」、「移動体」、「環境」といった要素が 情報通信技術によってどのように関わり合い、その結果どのような機能が実現できるかということである。 図に示すように、それぞれの関係は、互いに独立したものではなく、相互に関連性を持ったものである。 ここでいう環境には、情報的な環境と物理的な環境という2つの意味をもっている。 情報的な環境とは、人間が情報端末を通じて、あるいはAT自身がアクセスできるコンテンツやサービスの集合であり、 物理的な環境とは、人間が本来の感覚や身体の運動を通じて、あるいはATがセンサーやモーターを使って認識あるいは 作用できる現実世界の対象や状態を指している。 これらの要素間のスムーズな相互作用が可能になるように、センサー技術を含む情報通信技術が存在する。 これは、人間が通信を通して移動体との情報伝達を行ったり、移動体がセンサーの情報処理とモーターの制御を通して環境とのインタラクションを 行うことを可能にする。 さらに、人間が移動体を通して、通常は感じられない物理世界からの情報獲得を試みたり、情報世界から移動体の表示装置を通じて人間に 有用な情報を提示することも可能である。 この情報通信技術は、相互作用する人間・移動体・環境を一つの単位としたとき、 複数の単位にまたがる関係を形成し、全体としての大きなまとまりを構成していくことにも貢献する。
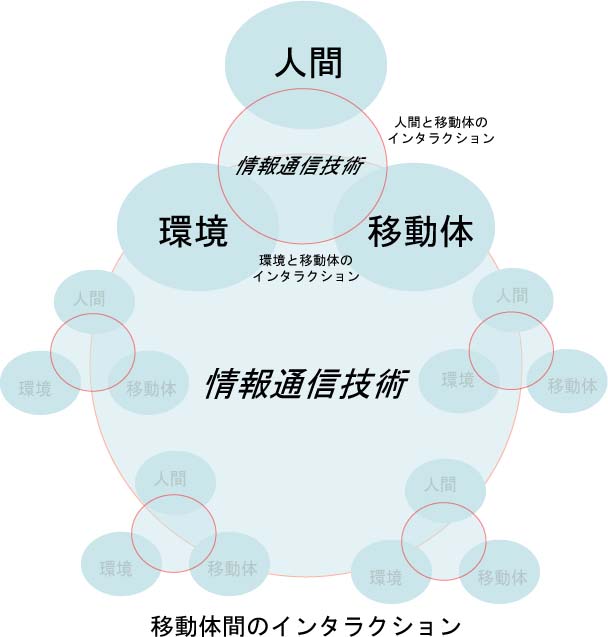
図2.1: 人間と移動体と環境の関係
2.2 システム構成
2.2.1 ATの2つのタイプ

図2.2: タイプA(左)とタイプB(右)
タイプAは、立ち乗り専用の高機能版であり、指紋センサー(図)による個人適応や、超音波センサーによる障害物回避、 カメラによる映像記録や情報提示、GPS (Global Positioning System)(図})による位置情報の取得などが可能である。

図2.3: 指紋センサー
図2.4: GPS
図2.5: コンソール用タブレットPC
タイプBは、立ち乗り用あるいは座り乗り用に変形可能であり、荷台への変形も可能である。 コンソールにはPDA (Personal Digital Assistant)が用いられている(図)。 後述するように、これは、取り外してリモコンとして利用することも可能である。

図2.6: コンソール用PDA
2.2.2 走行システム
図はATのシステム構成を示している。これより、ATの走行の仕組みは次のようになる。 左右のペダルに取り付けられている角度センサーからの情報と、車体に取り付けられている3軸角度センサーからの情報が モーター制御システムに送られ、モーター制御システムが左右の車輪モーター駆動系の制御を行う。 また、距離センサーからの情報によりモーター制御システムは減速や停止のような制御をモーター駆動系に対して行う。 電動雲台付きカメラやGPS、RFタグリーダーのようなデバイスからの入力をインタフェース制御システムが受け取り、 ペン入力可能なディスプレイにユーザーに提示したい情報の出力を行う。 さらに、無線アドホックネットミドルウェア(cogma)を利用することにより、他のATとの間で相互通信を行うための ネットワークシステムに接続する。 このミドルウェアはネットワーク制御システムと連携している。
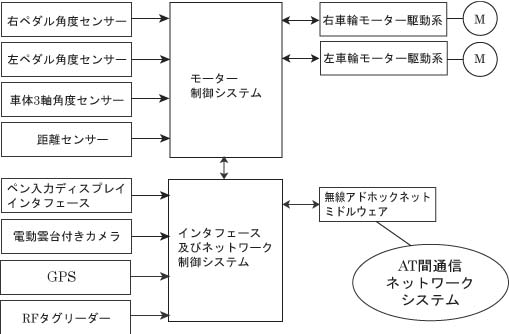
図2.7: ATのシステム構成図
ATの駆動系には電動車椅子用のモーターと車輪が利用されている。 また、ATは基本的に両足のみで操縦するようになっている。 両足はそれぞれ独立に可動するペダル(図)に置き、その裏には傾斜センサー(図)が 左右1つずつつけられ、ペダルの角度データが車体後部に設置されている制御用PC(図)に送られる。

図2.8: ペダル
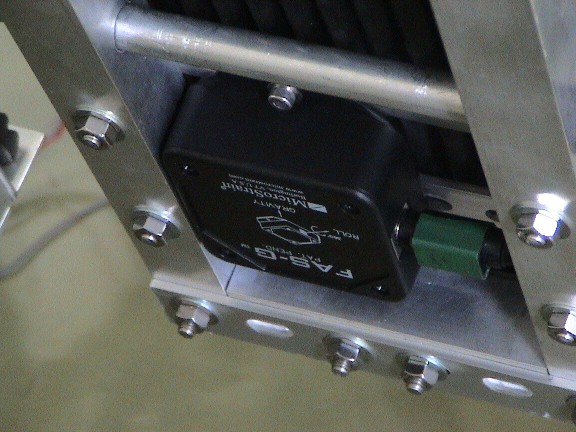
図2.9: 傾斜センサー
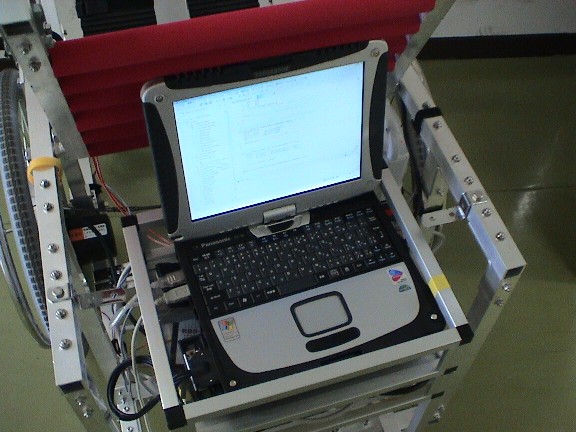
図2.10: 制御用PC
さらに、進行方向や道の勾配を計測するための3軸角度センサー(図)も車体に取り付けられている。
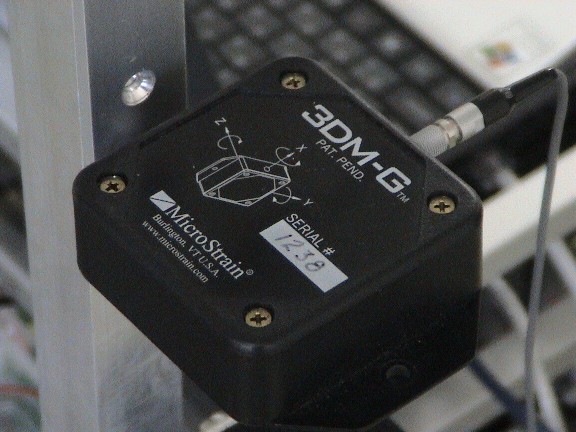
図2.11: 3軸角度センサー
2.2.3 指紋認証による個人適応
指紋センサーを利用するには、まず登録を行う必要がある。 センサーに指をかざして数秒待ち、良好なデータを得ることができれば登録完了である。 次回からは指をかざせば、各人用にカスタマイズされた状態でATを操縦できる。 ここで、個人用に保存されているデータとして、走行時に必要なパラメータがある。 ATは、操縦者の熟練度に依存して、操作性を変化させることができる。 具体的には、ペダルの踏み込み角度に対応する加速度に関するパラメータを、搭乗者ごとに個別に設定し、指紋認証と連動して切り替えることによって、 その人に適した操作感で操縦できるようにした。
つまり、初心者は急な加速や停止、回転に慣れていないため、少しの踏み込みではあまり加速しないようにして、 たくさん踏み込んだときのみ、緩やかに加速するようにする。 操縦に慣れているもの(上級者)に対しては、機敏な運動にも対応できるように、停止から高速な状態までの加速を強めた。 経験が積み重ねられ技術が上達するにつれパラメータもシフトしていくことになる。 具体的には、ペダルの角度とモーターにかける電圧の対応関係をパラメータの値によって変化させるのである。 式はが右ペダルの初期位置
から現在の角度
までの変位を表しており、 式は
が右ペダルの初期位置
から現在の角度
までの変位を表している。 式は、ペダルの変位の差をとっており、この値から式により回転方向の速度
を決定する。 式は、ペダルの変位の和をとっており、この値から式により前後方向の速度
を決定する。 式は、
の値が閾値
を越えるまでは、重み
がパラメータとなり、 閾値
を越えてからは、重み
がパラメータとなる。 ここで、閾値
は細かな動きと大きな動きを区別する値であり、重み
,
は搭乗者の加速感を決定する値である。 また、式の
は
において
が一意に決定されるためのオフセットである。 式は、
の値が閾値
を越えるまでは、重み
がパラメータとなり、 閾値
を越えてからは、重み
がパラメータとなる。 ここで、閾値
は細かな動きと大きな動きを区別する値であり、重み
,
は搭乗者の加速感を決定する値である。 また、式の
は
において
が一意に決定されるためのオフセットである。 これは、図において、直線の傾き(
,
,
,
)を大きくすることにより 加速感の向上を実現することと対応する。
\begin{equation} \phi_R = \theta_R - \theta_R* \label{1} \end{equation} \begin{equation} \phi_L = \theta_L - \theta_L* \label{2} \end{equation} \begin{equation} \varphi = \phi_R - \phi_L \label{3} \end{equation} \begin{equation} \psi = \phi_R + \phi_L \label{5} \end{equation} \begin{equation} V_x= \left \{ \begin{array}{ll} \dfrac{\varphi \times 128 \times \varpi_1}{360} & (\tau > |\varphi|) \\ \\ \dfrac{\varphi \times 128 \times \varpi_2}{360} + \delta & (\tau \leq |\varphi|) \end{array} \right. \label{4} \end{equation} \begin{equation} V_y= \left \{ \begin{array}{ll} \dfrac{\psi \times 128 \times \omega_1}{360} & (\lambda > |\psi|) \\ \\ \dfrac{\psi \times 128 \times \omega_2}{360} + \varepsilon & (\lambda \leq |\psi|) \end{array} \right. \label{6} \end{equation} \begin{equation} \delta = \frac{128 \times \tau \times (\varpi_1 - \varpi_2)}{360} \label{7} \end{equation} \begin{equation} \varepsilon = \frac{128 \times \lambda \times (\omega_1 - \omega_2)}{360} \label{8} \end{equation}
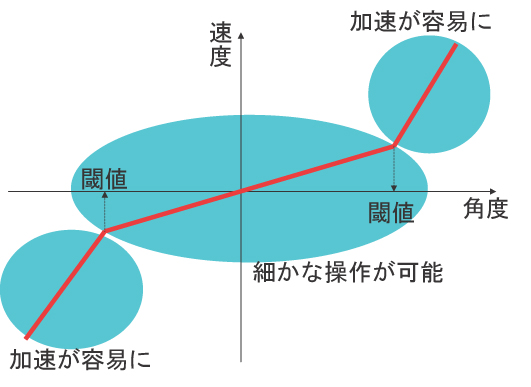
図2.12: 角度と電圧の関係図
2.2.4 カメラと赤外線による対象認識と情報提示
カメラと赤外線送受信装置を利用して、実世界の対象を認識して、その関連情報を映像と連動して提示する仕組みが実現されている。 この仕組みでは、赤外線信号を送受信する赤外線タグを対象に貼り付け、タグがIDを赤外線で発信することによって実世界対象を認識し、 IDからデータベースを検索することで、その対象の関連情報を搭乗者に提示することができる。
2.2.5 GPS/DGPSによる現在位置・方向データの取得
GPSとDGPS (Differential GPS)を用いるこことにより、利用しているGPS個数、方位、誤差、緯度、経度、 測位状態などの情報を取得することができる。 これらのデータはNMEA-0183フォーマットでシリアル通信により制御用PCに送られる。 特に広範囲な移動を行う際には、これらの情報を記録しておくことで、後から移動体の走行した軌跡を解析することができる。
2.3 操作方法
2.3.1 制御機構
ATは足で操作する乗り物である。基本的には、傾斜センサーを使ってペダルの傾きをセンスして 初期位置からの左右のペダルの変化した角度の和で前後方向の速度(式)を、差で回転方向の速度(式)を決めている。 具体的には、メインスイッチを入れたときの左右のペダルの角度を記憶しておき、そこからの相対的な 角度変化(式,)を傾斜センサーを用いて計測する。左右のペダル共に前方へ倒すと前進し、後方へ倒すと後退する。 右ペダルを前へ・左ペダルを後ろへ倒すと左に回転し、逆の動作をすると右に回転する。 踏み込んだ角度により走行速度が決定される(図)。細かな動きをしたい時は少しだけ踏み込む、 大きく動きたいときはたくさん踏み込む。 大きな踏み込みと小さな踏み込みには閾値が設けてあり、それをカスタマイズすることにより 操作性を搭乗者に応じて最適化させることができる。 これは閾値の未満の区間の幅を広げたり、狭めたりすることで調整することが可能である。
2.3.2 インタフェース
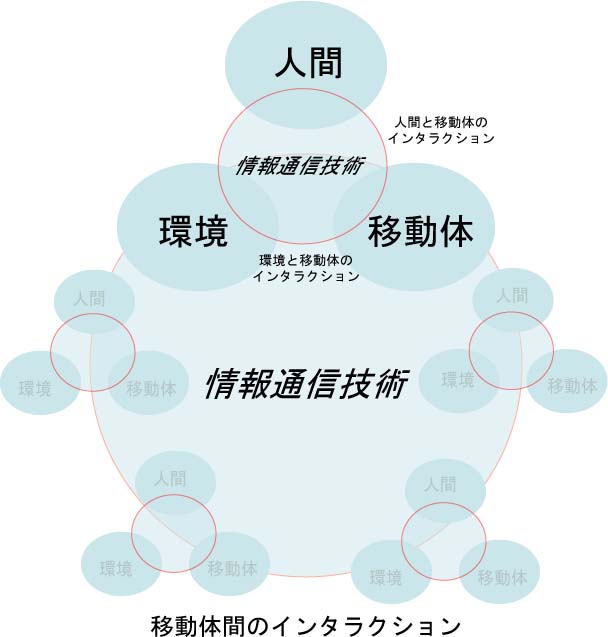
図2.13: 走行時のコンソール画面(タイプA)
コンソール上部のボタンには以下のような機能がある。
- 初期化ボタン ペダルの回転角度の変位を計測するときの基準となる値を決めるため、 操縦をする前に基準となる角度を保存するボタンである。 メインスイッチをONにしたときに自動的に初期化操作が行われるようになっているため 最初はボタンから初期化する必要はない。 途中で初期位置を変更したいときは、このボタンから初期化操作を行う。
- ブラウザボタン タグリーダーのスイッチをONにするボタンである。 これにより、RFタグからデータを読み取る準備が整えられる。 タグを発見し情報をダウンロードするとブラウザを通してユーザー(搭乗者)に情報の提示を行う。
- 設定ボタン 指紋センサーを利用するときのダイアログを呼び出すボタンである。 指紋データの登録と個人認証を行うことができる。 登録に関してはデータの採取を3回行い、最も良好なデータを登録する。 個人認証に関しては、数秒指をセンサーにかざすことで完了する。 これにより識別されたユーザーのプロファイルが呼び出される。
- リモコンモードボタン ATを遠隔操作モードに設定するボタンである。 PDAなどのATと通信可能な情報端末を用いて、直接乗り込むことなく外部からATを扱うことが可能になる。 操作の方法に関しては、 節で詳しく述べる。
- 連携マスターボタン 複数のAT間で協調動作などを行うときに、「マスター」として振る舞い、集団行動の統率を図るモードに設定する。 具体的には、自分の走行状態を記録しながら、そのデータを他のATに伝送する。 協調的な行動を行うときの中心的な役割を担うことになる。
- 連携スレーブボタン 協調動作を行うときに、「スレーブ」として振る舞い、基本的にはマスターの指示に従って行動する。 具体的には、マスターから受け取ったデータを基に解析を行い、行動を決定する。 この状態では、搭乗者が自分の意思で操縦を行うことはできないが、 センサーによる障害物検知が行われると減速や停止といった行動がとられる。
- 連携スタートボタン 連携動作を行うときに、マスターがスレーブに行動の開始を指示するボタンである。 マスターによる協調動作開始の指示があるまでは、スレーブは行動を開始しない。
次に、メータについて説明する。 上段は、左右のペダルの基準点からの変位を表示しており、 下段は、左から3軸角度センサーによるpitchとyawの値(図)、そして、GPSによる方位を表示している。 画面右側の表示に関しては上から順番に、
- 右の車輪の積算距離と回転速度
- 左の車輪の積算距離と回転速度
- 前後左右の超音波センサーによる障害物までの距離
- 前後のバンパの衝突感知の状況
- GPSによる方位・緯度・経度
- GPSの衛星の測位状態
- GPSの測位誤差
といった情報を提示している。 また、超音波センサーやバンパが障害物を検出すると、搭乗者に注意を促すために コンソール中央に表示を行い、同時に制御系に減速等の指示を行う。
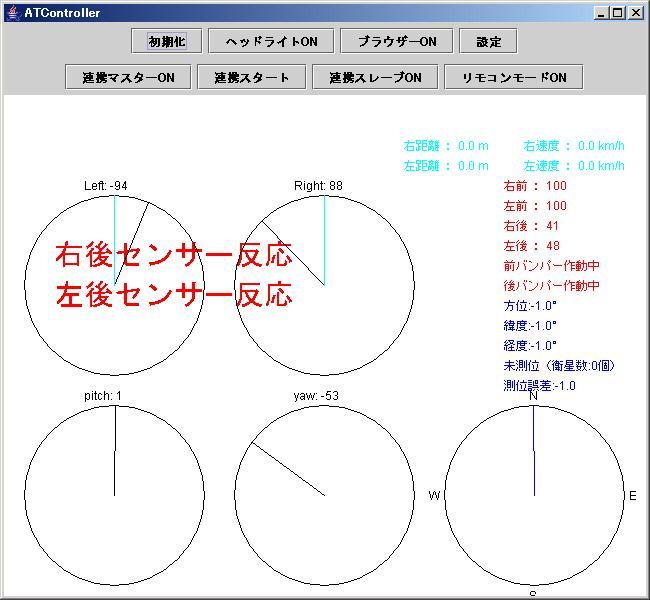
図2.14: Roll,Pitch,Yawの関係
タイプBのコンソール画面(図)は、タイプAのものの簡易版となっている。これはタイプBがPDAを用いており、 表示面積が小さいためである。 以下では、タイプAと異なる部分についてのみ説明する。
- 再接続ボタン 制御用PCとの通信が途絶えてしまったときに、再度通信を行うために使用するボタン。
- 切替ボタン リモコンモード(図 )との切替を行うときに使用するボタン。 リモコンモードに関しては、 節で詳しく述べる。
- Tagスイッチ 先ほど述べたブラウザボタンと同じ機能を提供する。 つまり、タグリーダーのスイッチをONにするものである。
- メッセージボックス 制御系からのメッセージなどを表示する場所である。 データの送受信などが正しく行われているかどうかを確認するためにも利用される。
なお、画面中央のメータは左から、左ペダルの角度、方位、右ペダルの角度を表示しており、 その上側には左右の車輪の回転速度が表示されている。
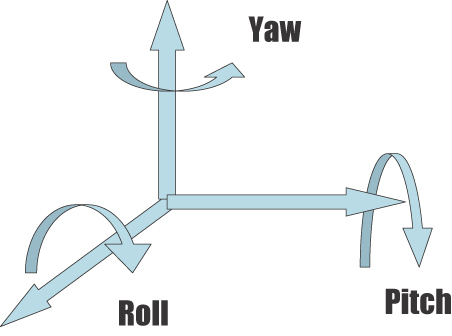
図2.15: 走行時のコンソール画面(タイプB)
3 ATと環境のインタラクション
3.1 移動体と環境の関係
この章では、移動体と環境のインタラクションについて述べる。 先に述べたように、ここでいう環境には物理的環境(現実世界)・情報的環境(情報世界)という二つの意味を持つ。 ATは情報世界にアクセスするためにネットワークに参加する。 インターネットに接続することでユーザーが必要とする情報を取得したり、 アドホックネットワークによる通信を用いて近くにいる仲間とのメッセージ交換を行うことが可能である。 また、物理世界にアクセスするためにさまざまなセンサー類を装備している。 近くの障害物を検出する超音波センサー、物体に衝突したことを感知するバンパー、 さまざまな場所に設置されたRFID (Radio Frequency Identification)を読み取るためのタグリーダーなどが挙げられる。
3.2 センサーによる障害物検知
前後左右の障害物に対応するため、超音波センサー(図)が車体前後に左右1つずつ 取り付けられている。 これにより障害物を検知すると、制御用PCから駆動系に対して減速するよう指示が出される。

図3.1: 超音波センサー
また、車体前後には衝突時の衝撃を抑えるためにバンパー(図)が取り付けられており、 バンパーに物体が接触すると即座に走行を停止する仕組みになっている。
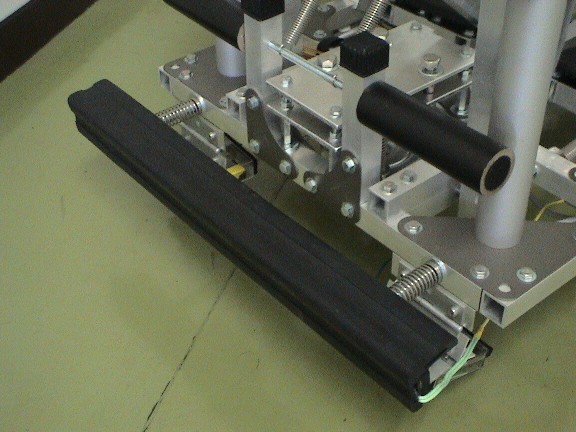
図3.2: バンパー
現在利用している超音波センサーのレンジは20cmから1mとなっている。 障害物などにかなり接近してからでないと反応しないため、もう少し距離の出るものを将来的には採用する予定である。 また、前後方向にしか反応しないので全方位の障害物に対応するためには、センサーの数を増やして様々な向きに取り付ける 必要がある。 さらに、前方の凹みなどに対応するためには、斜め下向きのセンサーを取り付ける必要がある。
3.3 タグリーダーによる情報取得
本研究では、物理的環境側に埋め込まれた情報世界との接点として、RFID (Radio Frequency Identification)タグ (図)を用いている。 そのため、ATの車体前部には RFIDの情報を読み取るためのタグリーダー(図)が取り付けられている。
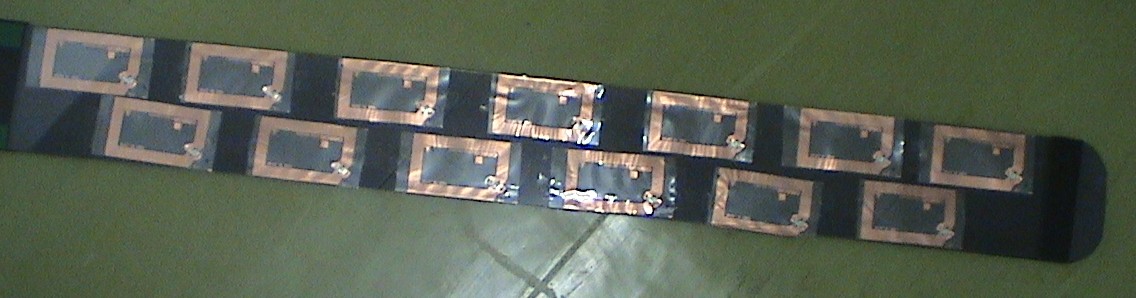
図3.3: RFIDタグ
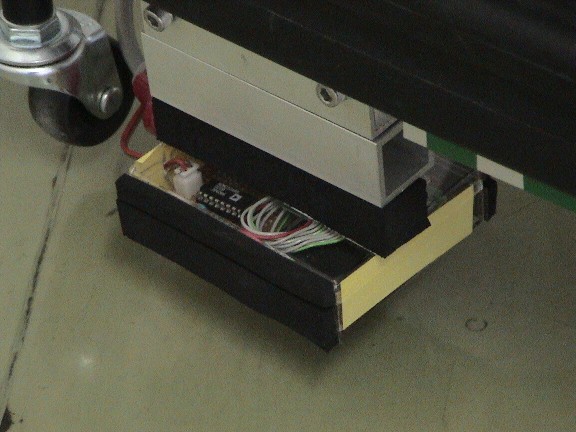
図3.4: タグリーダー
これによってATは、走行中に周辺の物理世界の情報を取得することが可能となる。 具体的には、現在走行地点に関する情報や、最寄りの地点までの経路などの情報を得ることができる。 これは、情報を取得するために通信すべきサーバーの情報がRFタグに書き込まれており、 そのサーバーから必要とするデータをダウンロードすることになる。 タグに直接データを書き込むと情報の鮮度が保てなくなるため、タグを用いて直接データを取得することはない。 詳細については、節で述べるが、タグリーダーを使って現在位置に関する情報を取得するという 路車間通信を利用してATの自動走行を行うことが可能である。 ユーザーが環境とのインタラクションから情報を取得する手順は以下の通りである(図)。
- RFIDなどから取得した情報などから、必要とするデータを保持するサーバーを特定し、アクセスする。
- ユーザーは必要とする情報をサーバーに要求する。
- サーバーは相手の環境に応じて、適切なフォーマットを選択し、データを出力する。 具体的には、ユーザーの使用する端末がPDAならば情報量を抑えて、PCならばデータを見やすく整形して渡してやる。 また、経路情報が必要なときはXMLデータのまま、現在地情報が欲しいときはサーブレット が XSLT スタイルシート(付録A-2)をあてて変換し、 HTMLを出力する。
- ユーザーは、適切な処理の行われたデータをサーバーから取得する。
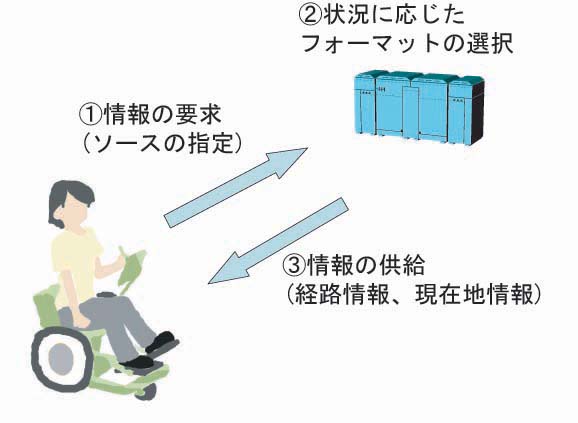
図3.5: データの取得
4 AT間協調
4.1 移動体間の関係
これまで、移動体同士が通信を行いながら協調的な振る舞いを行うことに関しては、 特にITSの分野で盛んに研究が行われてきた。 たとえば、隊列を組んで集団走行を行う研究などは実際に試されている。 これらの研究は、特に産業の分野への貢献が期待されており、トラック輸送における自動走行が実現されれば コスト削減などの効果がある。 本研究の目指すところは移動体間の連携にとどまらず、移動体同士の協調により人間同士のコミュニケーションを 助けることである。 同じ目的地に向かう者が集まったときに、誰か一人の先導する移動体についていくことで、残り移動体は 自分で操作することなく自動走行で目的地に到達することも、一つの例として挙げられる。 この行為の特徴は、前もって形成される集団が既定されているわけではなく、任意の時点で形成された 集団が協調動作を行うことができる点である。 つまり、ATはアドホック通信を行うだけでなく、アドホックなコミュニティを形成するためにも機能する。
4.2 AT間通信
本研究では、AT間アドホック通信を行うにあたり、モバイルエージェントシステムをベースとしたミドルウェアである cogma (COoperative Gadgets for Mobile Appliances)を利用した。 cogmaにおけてモバイルエージェントはCodgetと呼ばれ、そのCodgetを管理するエージェントシステムはCogManagerと呼ばれる (図)。 CogManagerはネットワークのノード毎にひとつだけ存在し、CodgetはCogManager間を自由に移動することができる。 cogmaには、 途中からネットワークへの参加・離脱をするノードに対応するためにリンクモニターという機能があり、 ノードを監視しながら、それに対応した処理を行うことができる。
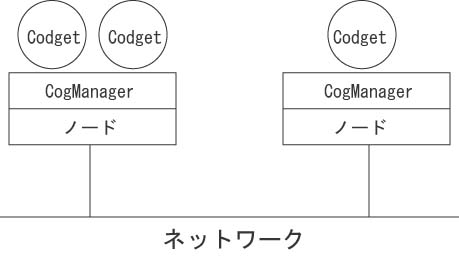
図4.1: cogmaの構成
つまり、複数のATから構成されるアドホックネットワークにおいて、1台のATは1つのノードに対応しており、 CodgetがAT間を移動することで、相互に通信を行っている。 cogmaを使うことにより、事前に通信相手についての情報を持っていないAT同士が、互いに通信可能な範囲に存在するときに 互いの存在の検知し、相互通信を行う環境を作り上げることが容易になる。 これは、通常、自分の近くに存在する移動体に関して事前に情報を持っているということはまれであり、 そのときの状況に応じて、動的にネットワーク構成を変更することに対応する必要があるためである。 相手の情報が分かった後は、ソケット通信を用いることにより必要な情報のやり取りを行うようになる。 本研究では、移動体同士の相互通信により前方を走行する移動体を自動的に追尾するシステムを実 装した。今回想定している状態は2台のATが存在し、1台(タイプA)のマシンの走行した軌跡をもう1台(タイプB)が トレースするということである。自動追尾を実現する手順を以下に述べる。
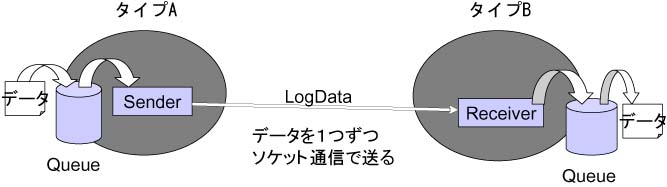
図4.2: 経路情報の伝達
4.3 経路情報の伝達による自動追尾
自動追尾を行う際は、前方のマシンは回転と前進・後退を同時に行うことはで きないようになっており、「直進」モードと「回転」モードのどちらかの走行モードを 維持しながら走行することになっている。
-
前方を走行しているマシンは自由に走行する。このとき、走行中の状態をログとして自動的に保存するようになっている。 このデータを基にして自動走行を実現することになる。ここで保存されているデータとして、表のものが 挙げられる。
-
蓄積された走行データはキューに貯められる。 前方のマシンの搭乗者が任意のタイミングで、走行データを後方のマシンに送信する。 この時点では、キューからデータが取り出されるだけである(図)。 後方のマシンは受け取ったデータをキューに貯め続けるだけであり、追従走行はまだ開始されない。
-
前方のマシンの搭乗者が追尾開始の信号を後方のマシンに送る。すると、後方のマシンはキューからデータを 取り出して送られてきた走行データの解析を始める。この間も、前方のマシンからデータが次々と送られてきている。 ログデータの一つのレコードの例を次に示す。
11_31_43,3.528,3.276,1.43,1.33,-0.26577675728733274,-11.422737123644456,-1.0,-1.0,-1.0,1
左からカンマ区切りで、時間(時・分・秒)、右の回転速度、左の回転速度、右の走行距離、左の走行距離、pitch、yaw、 緯度、経度、方位、走行モードである。このデータは、GPSで衛星を捕捉できなかったため、経度・緯度・方位が 測位できなかったものである。また、走行モードは"1"が直進モード、"0"が回転モードである。 これらのデータは0.5秒間隔で記録されていく(付録A-1にログデータの一部を示す)。
-
解析された結果を基に後方のマシンは前方のマシンの追尾を開始する。 ここでは、まず走行モードの判別を行う。 次に、走行モードが同一である状態の始点から終点までの差分を求める。 さらに自分の現状態をセンサー類から判断し、目標状態をセットする。 そして、走行モードが「直進」ならば左右の平均距離と自分の距離の差分だけ直進し、 「回転」ならば現在の自分のyaw値と走行データのyaw値の差分だけ回転する。 基本的にはこれらの手順を、走行データがキューに存在する限り繰り返し行う。 ただし、常に相手と自分の進行方向に関して補正をする必要があるかを監視し、 必要があれば方向を修正する(図)。
-
前方のマシンが停止してキューに貯めるべきデータがなくなり、キューの中のデータが全て取り出される (つまりキューが空になる)と走行データの送信を終了する。 後方のマシンはキューから取り出すデータがなくなり、解析すべき情報がなくなると 前方のマシンが走行をやめたと判断し、追尾を終了する。
|
データ |
取得される機器 |
|---|---|
|
日時 |
制御用PC |
|
走行距離 |
左右の車輪に取り付けられた回転数計測器 |
|
速度 |
左右の車輪に取り付けられた回転数計測器 |
|
yaw(方向)とpitch(傾斜) |
3軸角度センサー |
|
経度・緯度・方位 |
GPS・DGPS |
|
走行モード |
プログラム |
4.4 連携協調動作の応用
移動体同士が相互に通信を行うことによって、複数台の移動体が協調的な振舞いをすることが可能になる。 例えば、先導する移動体に制御を移譲することにより実現する隊列走行や、近距離に存在する移動体同士が進行方向を 伝えることにより接触などの危険を回避することなどが挙げられる。 これらの技術が利用される場面として、工場や遊園地などのレジャー施設がある。 工場では、資材等の運搬を行う際に複数台の車両が隊列を組んで走行する場合が考えられるが、 追従する車両は、自分の通信相手の車両を変える事で、動的に隊列構成を変更する事が可能になる。 また、広い敷地内を移動する手段として低速な移動体を利用する状況を想定すると、安全対策の点からも 近くを走行している移動体同士が相互に通信を行い、未然に接触等を避ける事が望ましい。 管理する側からしても、全ての移動体の挙動を把握し制御する必要がなくなるなどのメリットもある。
5 ATと人間のインタラクション
5.1 移動体と人間の関係
この章では、人間と移動体のインタラクションについて述べる。 これまで、人間と移動体の関係についてあまり考えられていないが、これらの間に通信をはさむことにより 両者の間で相互に情報のやり取りを行うことが可能になる。 例えば、操縦者の携帯端末による移動体の遠隔操作や、移動体を離れているときに操縦者に異常を 伝えたりすることなどが挙げられる。 また、単なる移動体ではなく、人が情報世界や物理世界とアクセスするカスタマイズされた空間を目指すため、 利用するごとにユーザーに適応していく仕組みも必要になる。 ATを利用する場合は、走行データなどが蓄積されることにより、徐々にユーザーに適した操作感を構成していくことが可能である。 これは、操作時に必要となるパラメータを各人ごとに用意し、操縦に対する習熟度などからパラメータを調整することが できるためである。 人間の要求に移動体が自然に応える形で、両者の間の結びつきがより深いものとなる。
5.2 移動体における個人への適応
前述のように、タイプBのコンソールはPDAであり、情報を人間に提示するインタフェースとしての役割を果たしている。 また、PDAは人がATを操作するツールという役目も果たしており、人とATとを結ぶ接点になっていると言える。 PDAとATは必ずあるペアでないと使えないということではなく、自分が所有している(自分のデータが保存されている)PDAを使って、 任意のATと組み合わせて利用することができる。 これは、PDAとATの組み合わせが完全に固定されているのではなく、アドホックネットワークを通じて 相互に情報のやり取りを行い、相手を決定するという、柔軟な関係を築いているためである。 PDAもATも通信を行うためにcogmaを利用しており、両者が通信可能な範囲に存在すれば、 情報をやり取りする基盤は整えられている。 これにより、いつ・どこでATを利用しようとしても常に自分用にカスタマイズされた状態で操作することが可能になる。 これまでの走行情報の履歴や個人の嗜好などのデータがPDAに蓄積されることにより、使えば使うほど乗り物が人に馴染んでいく ことになる。 このような方法で乗り物が人に適合していくことになる。
5.3 PDAを用いた遠隔操作
PDAの利用方法としてリモコンによるATの遠隔操作がある。PDAから前進・後退・回転などを指示すると、 アドホック通信によってATが制御命令を受け取り、指示された通りに走行する。 搭乗者が搭乗しなくてもATを操作することができるため ちょっとだけATを動かしたいときなど手軽に扱える。搭乗者がその場に不在でも、ATの状況をモニタリングしながら操作することで 遠隔地から移動体を操ることが可能である。 使用方法は図に示すように、画面の四角のなかで線が直交しているところが現在地であり、そこから操作したい方角を タップすることで そちらの方へ動き出す。画面の上下が前後方向に、左右が回転方向に対応している。ジョイスティックと同じ要領で 操作が可能である。また、ATからの受け取ったメッセージを表示させることや、yaw・pitch・方位といった情報を 把握することによってATの状態を監視することができる。タグスイッチをオンにするとタグリーダーが動作を開始する。 タグを発見すると情報をPDAに提示し、操作者はATが走行している場所の情報を取得することができる。

図5.1: PDAのリモコンモード
5.4 地図情報に基づく自動走行
システム構成で述べたように、ATにはタグリーダーが装備されており、RFタグに書かれているソースをWebサーバーから 読み込むことにより、タグが存在する近辺の情報をATは取得することができる。 この情報の中には、その地点からある地点までの地図情報が記述されており、その情報に従って走行することにより 目的地に到達することが可能となる。 地図情報には、現在地から目的地までの道筋に関する方向と距離が記述されており、この情報を用いた ATの自動走行システムを実装した。 なお、ATは距離に関しては車輪の回転数から走行距離計を算出することにより、また、方向に関しては3軸角度センサーの ピッチにより自分の現在の情報を取得することが可能である。 今回想定している状態は1台のATとPDAを所有する人が離れた地点に存在し、PDAを持った人がいる所までATがやって来る というものである。 自動走行を実現する手順は以下の通りである。
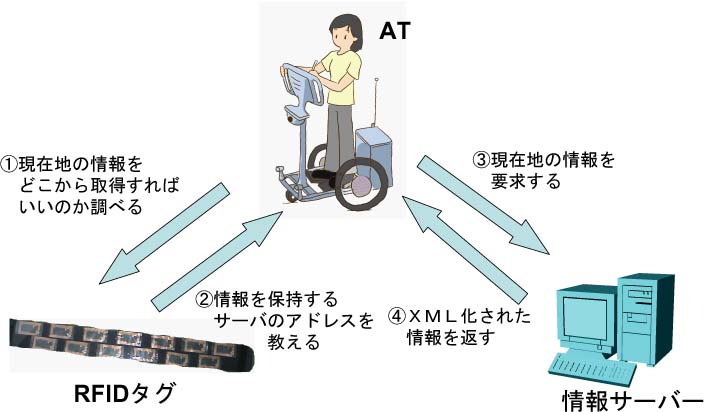
図5.2: 現在地情報の取得
-
ATはまず、自分が今どこにいるのかを知らなくてはならない。そこで、 タグリーダーを用いてRFタグを読み込むことにより、 現在地の情報をどのサーバーから取得すればよいかを調べる。
-
現在地の情報を保持するサーバーが特定されたので、そこにアクセスし、XML (eXtensible Markup Language)フォーマットで記述された情報を 取得する(図)。 この時点で、ATは現在地を特定することができる。XMLの例を図に示す。
-
ATがいる場所とは異なる地点にいる人間が、自分の居場所(目的地)に関する情報を ATに伝える必要がある。そこで、 目的地に存在する人間は携帯端末を用いて、その場の情報を取得しATに送信する。 具体的には、PDAに装着されているタグリーダーで、その場所に関するXMLを読み込み、 その位置をATに通知する。
-
ATが人間がいる場所がどこであるかを受け取った時点で、目的地の設定が完了する。 そして、先に得られたXMLから、目的地までの経路情報を取り出す。 この経路情報に基づいてATは自動走行を開始することになる。 XMLデータは、図に示すような構成になっている。 titleタグにはその地点の名前が、descriptionタグにはその地点に関する情報が記述されている。 また、locationタグには、その地点のロケーションID(ある地点を一意に決定する識別子)が記述されており、 routeタグ以下のitemタグには、その地点からあるIDの地点までの経路が記述されている。 routeタグは複数のitemタグを持つことが可能である。 図のXMLはロケーションIDが1のものであり、ロケーションIDが2の場所からは 直進で5m進むと到着することを示している。
-
経路情報が複雑になると、きちんと経路を辿っているのかどうかを確認しながら走行する必要がある。 そこで、ATはチェックポイントを確認しながら、目的地に向かう。 チェックポイントとは、目的地に向かう間に通過すべき場所のことであり、 これを発見できない場合は、予定された経路から外れたと判断し停止する。 図のXMLでは、ロケーションIDが4の場所からは4メートル直進するとロケーションIDが3の チェックポイントに、時計回りに90度回転するとロケーションIDが2のチェックポイントに、 そして、直進で5m進むと目的地に到着することを示している。
-
チェックポイントを通過するたびに、ATはPDAを所持する人に現在地を通知する。 指定されたすべてのチェックポイントを通過した後、目的地に到達することで自動走行は完了する。
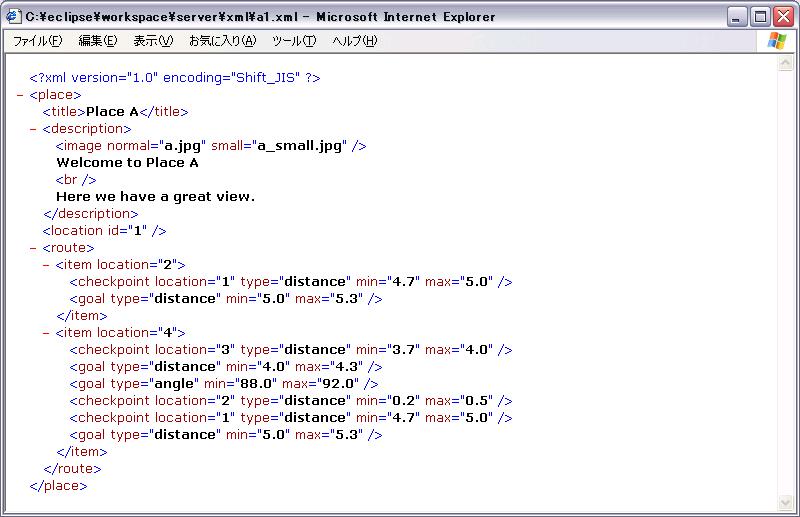
図5.3: サーバーから取得するXMLデータ
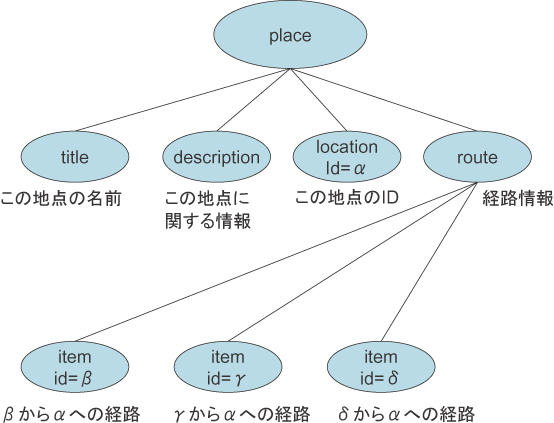
図5.4: 経路情報XMLの説明
6 関連研究
6.1 知的車椅子
従来の電動車椅子では,不慣れな使用者による事故により一部の施設内での使用が禁止されるなど, 普及を妨げる様々な問題が残されている。今後,電動車椅子が広く社会で使われるようになるためには, 更に高い安全性と機能性を実現するための知的な機構が必要である。 このような背景の下、知的車椅子に関する研究が行われている。 知的車椅子とは,「環境を観測し自律的で安全な走行する」、「他の知的車椅子と協調し集団としての効率的に振る舞う」、 「搭乗者や外部システムと協同して目的の動作を達成する」といった機能を持つ知的エージェント車椅子である。 知的車椅子には,予め障害物回避や壁沿い行動を学習させており,移動時の搭乗者の操作負担を軽減し、 さらに、事故を未然に防ぎ,安全で快適な車椅子使用や、ドア通過や車庫入れ動作などの定型行動が可能である。 さらに,他の車椅子とアドホック通信により,進路の譲り合いや隊列成型といった協調行動を起こし,効率的な走行を実現する。
この研究は、車椅子を日常的に必要としている人を対象にしており、限られたユーザーに対しての使い勝手の向上を目指しており、 事前に行動パターンなどを学習をおくなど、ユーザーの操作を手助けする技術に関して非常に優れている。 しかし、本研究では対象となるユーザーは限定されておらず、むしろ健常者や障害者という枠を超えて 誰もが利用できる新しいツールを目指している。
6.2 PM (Personal Mobility)
「であう、つながる、あつまる」という新コンセプトのもと、先端の情報通信技術の活用により、人とクルマとの心通う一体感を 追求した「着る感覚」の一人乗りパーソナルモビリティがPMである。 PMの特徴として、インストルメントパネルには、赤外線式指先検出センサーによる空間入力を実現した 「ビジュアルコミュニケーションシステム」を採用し、車両情報はもとより外部からの様々な情報入手が可能であること、 複数のPM間での情報交換、情報共有化を可能にするとともに、車載コンピュータによるステアリング、アクセル、 ブレーキの制御により、自動走行や追従走行機能を付与することができることなどが挙げられる。 PMは走りながら情報をサーチし、近くにいるPMや誰かのPMが残した情報をラベル化するなど、 全ての情報をビジュアル化して空間ディスプレイシステムに表示する。ドライバーは、空中に浮いたように 表示されるディスプレイを指差して、近くのPMやラベル情報にアクセスし、インタラクティブに コミュニケーションできる。 またインターネットでチャットするように、誰とでも気軽にコミュニケーションすることができ、 双方向通信が始まるとボディの色が共鳴モードに変わる。 また、自分で操縦しなくても誰かのPMについて走行することもできる。
さらに、あらかじめ入力されたドライバーの好みやリクエストに応じて、誰か他のPMが残したラベル情報をチェックし、 サーチした情報からドライバーが興味を持ちそうな情報をピックアップして知らせてくれる。 乗降時や低速時はアイポイントの高いモードで、高速では低く安定したモードで走行する。乗降モードでは 左右の後輪を逆回転させて、その場でくるりと回転するので、狭いスペースに簡単に駐車できる。 PMの運転はドライブコントローラに集約されていて、右のコントローラを前に倒すと前進、 後ろに倒すとブレーキになる。ダイヤルを左右に回すと前輪が向きを変える。 その場回転モードに切り替えてダイヤルをいっぱいに回すと、PMはその場でクルリと回転する。 2005年3月から愛知県で開催される国際博覧会「愛・地球博」には、PMのコンセプトをさらに進化させ、夢と楽しさを乗せた車 「i-unit(アイユニット)」を出展予定である。
PMのコンセプトは、本研究と非常に近いものがある。特に、移動体同士のインタラクションを考慮している点、 個人に適応する乗り物であるという点、移動体がユーザーに情報提示を行う点などである。 しかし、ATは屋内での利用も想定しており、基本的に低速な移動体であるため、 人間の生活に密着したより身近な乗り物として利用できる。また、PMはあくまで自動車の小型化・情報化であるにとどまり、 ATのように日常世界と情報世界の密な融合を目指した新しい情報端末を目指すものではない。
6.3 ITS (Intelligent Transport Systems)
ITSとは、最先端の情報通信技術を用いて人と道路と車両とを情報でネットワークすることにより、 交通事故、渋滞などといった道路交通問題の解決を目的に構築する新しい交通システムであり、 「ナビゲーションシステムの高度化」、 「自動料金収受システム」、 「安全運転の支援」、 「交通管理の最適化」、 「道路管理の効率化」、 「公共交通の支援」、 「商用車の効率化」、 「歩行者等の支援」、 「緊急車両の運行支援」 といった9つの開発分野から構成されている。 現在、VICS等による交通関連情報の提供により、渋滞情報や最適経路等がナビゲーションシステムに表示されるようになり、 また、自動料金収受が開始され、料金所での渋滞が解消されはじめている。今後、ITSは以下のような発展が期待される。
2005年頃には、 ITSにより利用者に提供される情報は、目的地に関するサービス情報、公共交通情報など、その情報内容が拡充され、 一層の利用者サービスの向上が図られる。 また、ドライバーの安全運転の支援と歩行の安全性向上により、高速道路、一般道路における交通事故の減少が図られる。 交通事故等が発生した場合においても、迅速な通報と交通規制により、被害の拡大が防止され、緊急・救援活動の迅速化と合わせ、 従来であれば命を落としていたかもしれない人々を救えるようにする。 2010年頃には、 インフラの整備と車載機等の普及に加えて、ITSを社会システムとして定着させるための法的、 社会的制度の整備も行われ、ITSによる効果は、広く国民全般に行きわたる。また、さらに高度な機能の実現により、 自動運転が本格的にサービスを開始し、車内は安全で快適な空間となる。 2010年以降は、 ITSの全てのシステムが概成するとともに、光ファイバー網の全国整備などによる 高度情報通信社会の本格的到来により、社会システムの革新が行われる。 この時期には、自動運転の利用者が増大しはじめ、一般的なシステムとして定着しはじめるなど、ITSに関しても熟成の時期を迎え、 ITSは道路交通ならびに交通全体に係わる基本的なシステムとして広く国民に受入られている。これにより、交通事故による 死亡者数はモータリゼーションの進展にも係わらず、現在よりも大幅に減少することが期待される。また、都市部をはじめとした 道路等の渋滞は緩和され、快適で円滑な移動が可能となる。さらに、業務交通量の低減により沿道環境、地球環境との調和が 図られる。
ITSは、汎用の道路交通情報インフラであるが、屋内にも乗り入れ可能な個人用の小型移動体については考慮されていないため、本研究はその部分を補完するものとなる。さらに、本研究は、携帯情報端末を 利用したさまざまな情報サービスに関する研究と、交通・運搬の自動化等に関する研究の接点に 当たり、両者を連動させることにより、より高度で安全な都市生活の実現を目指すものである。
7 おわりに
7.1 まとめ
本研究では、物理世界と情報世界の融合を目指し、人間にとって安全で快適な新しい生活手段として 個人用知的移動体ATを開発した。 情報通信技術を移動体に適用することで、移動体と移動体、移動体と人間、移動体と環境の新たな関係が考えられ、 それに基づいたアプリケーションの例として、経路情報の伝達による自動追尾システム、PDAを用いた遠隔操作、 地図情報に基づく自動走行システム、などを実装し、実験を行った。
7.1.1 情報世界と物理世界の融合
ATは、人間が情報にアクセスすることを手助けし、社会生活を営む中で自然な形で、そして簡単に、自分にとって 有益な情報を取得することを可能にする。情報をうまく活用することで、日々の暮らしの質を向上させたいといった 多くの人の要望に対する答えのひとつとして、ATの存在価値が見出される。 日常生活の中で使われるものに、情報端末のような機能を追加するのではなく、 そのもの自体をネットワークを構成する一員となることで、人間を中心とした新しい物理的・情報的なプラットホームを 形成することが可能になる。 人間が常に情報世界にアクセス可能な状況を作るために、個人ごとにカスタマイズされた空間を提供しながら 日々の生活を送るようになれることが理想である。 つまり、情報と共に人間が移動することができれば、より理想的な状況を構築することができると思われる。
7.1.2 通信の重要性
この新しいツールの魅力が最大限に発揮されるためには、通信の存在が極めて重要である。 これまでのスタンドアロンマシンとしての移動体が、相互に通信する機能を与えてやることで、 マシン同士がネットワークを形成し、ひとつのコミュニティを形成する。 誰かひとりの意思で集団が形成されるのではなく、多くの人が他者との交流・協調をもとめてグループの一員となり 自然な形でグループが形成されるのである。 集団で協調を図るためには、相互に意思の疎通を図る必要があり、そのために自分の状態を他者に知らせ、 他者の状況を確認する必要がある。
7.1.3 移動体と環境の関係
移動体がセンサーなどを通して外の世界の情報を自動的に取得することで、その時点で最適な走行制御を行うことが可能になる。 たとえば、障害物を前方に発見したので減速させたり、何かに衝突したので緊急停止するようにしたりすることである。 このように、人間が意図せずとも、移動体が制御をアシストすることで人間の不注意による事故などがおきる可能性を 低減させることができる。 また、ある時点で走行している場所に関して、リアルタイムな情報やその地点特有の情報を人間に提示することで 人間が状況判断する材料を与えることも可能になる。 近くの場所までの経路情報を知ることにより、経路を少しずつ辿っていくことで、最終的な目的地まで到達することができる。 たえず変化し続ける自己の周囲の環境に動的に対応することで、人間の意図する行為の実現を手助けするのである。
7.1.4 移動体間の関係
移動体と通信を組み合わせることで実現できるアプリケーションの例としてプラトゥーン走行があげられる。 プラトゥーン走行とは、複数の移動体で隊列を構成し、先導する移動体が後続の移動体を牽引することである。 本研究では、先導するATが走行中に計測可能なデータを記録し、そのデータを後続のATに伝達することで プラトゥーン走行を実現している。 これまでの研究と大きく異なる点は、この走行を非同期で行うことが可能な点である。 先導するATのデータを受け取った側は、そのデータを解析した結果に沿って走行するが、 自分の置かれている状況に応じて、最適な行動を自分で決定することができる。 そのため、単純に前の移動体を追いかけるのではなく、環境からの情報も考慮しながら半自律的な走行を実現することが可能になる。
7.1.5 移動体と人間の関係
移動体が通信する機能を獲得することで、人間との間で情報のやり取りを行うことも可能になる。 移動体を操作するのに必ずしもその場にいる必要がなく、携帯端末等のネットワーク通信可能なツールを用いて 移動体の状況をモニタリングしながらリモートで操作することが可能になる。 また、人間の嗜好や習慣等を移動体に伝えることが出来れば、その人にとって快適な移動空間が形成される。 今回は、PDAに個人データが蓄積されそのデータをATが利用する形で、これを実現しようと試みている。 このような行為を行うことにより、移動体と人間の間の関係がより深いものになり、各人用にカスタマイズされた 情報空間を利用することができるようになる。
7.2 今後の課題
7.2.1 個人適応の改善
ATの個人適応の精度を高める必要がある。現在、走行時に必要となるパラメータを各人ごとにカスタマイズしているが そのパラメータを増やし、より操作性を向上させる必要がある。 具体的には、現在のシステムでは踏み込みの大きさと走行速度の関係が一次関数で表されているが、 この関数をより運転に適した関数に置き換え、それに必要なパラメータを定義する必要がある。 また、現時点では初心者や上級者といったパラメータの初期設定は用意されているが、 カスタマイズする際は自分で設定を直す必要がある。 この仕組みをもっと直感的な方法で実現されるように、パラメータ設定用のわかりやすいインタフェースを 備える必要がある。
7.2.2 嗜好に合わせた情報の提示
現在、外部の世界から取得して利用している情報は経路情報とその地点の簡単な情報だけである。 これだけでは、情報空間をうまく利用していることにはならない。 これからは、個人が自分の嗜好などをATに教えてやることで、多くの情報の中から個人ごとにふさわしい内容の 情報をピックアップし提示するなどの工夫が必要がある。 将来的には、同じ趣味を持ち合わせた者同士が、自然にグループを形成し、情報交換するなど コミュニケーションを円滑に行うためのアシストを自動的に行うことなどが期待される。
7.2.3 環境への情報の付加
自分が持っている情報を、他の人にも伝えるために直接ネットワークに参加して、情報を共有するという方法もある。 しかし、時間を共有する者だけで情報を共有するのではなく、多くの人の感想などをデータとして保存することで 後から再利用することが出来れば、とても便利である。 具体的には、ある地点に関するデータをサーバーからダウンロードするが、そこで各人が得た情報等をそのデータに付加(アノテート) して、サーバーにアップロードする。 これにより、情報の蓄積がおこなわれ、その情報はまた別の人に利用されることになる。 つまり、情報を一方的に受け取るだけではなく、利用者側からデータなどを提供することで、 全体的な情報量を増やしていくことになり、情報の持つ利用価値がさらに上がることにつながるであろう。
7.2.4 グローバルネットワークとの統合
移動体と情報世界がリンクする手段としてインターネットのようなよりグローバルなネットワークを利用することがある。 これにより、現在地に関する情報やユーザーが必要としている情報をより広範囲に入手することができるが、 現在のシステムにはインターネットから情報を取得する仕組みが取り入れられていない。 アクセスポイントがある場合はそれを利用し、そうでない場合はアドホック通信を用いるなどのように、 そのときの状況に応じて適切な方法で移動体が相互に通信する仕組みを構築していかなければならない。
謝辞
本研究を進めるにあたり、指導教官である長尾確教授、大平茂輝助手には、研究の心構えなど基礎的なことから、 ゼミ等を通しての貴重なご意見、論文指導等を賜り大変お世話になりました。御礼申し上げます。
梶克彦さんには、Javaに関するアドバイスなど頂いたり、研究室の明るい雰囲気作りに 努めていただき、大変感謝しております。 山根隼人さんには、研究に関する多くの有用なコメントを頂いたり、 PDAプログラミングなどの協力をしていただき、大変感謝しております。
松浦真治さんには、コーディングの基本を教えて頂きました。 山本大介さんには、研究に行き詰ったときに相談にのって頂きました。 加藤範彦さんには、自分が必要としていた様々な情報を教えて頂きました。 松本和之さんには、有用なツールを紹介して頂きました。 大変お世話になりました。ありがとうございました。
清水敏之さんには、最新テクノロジーについて教えて頂きました。 細野祥代さんには、研究に関してコメントを頂きました。 大変参考になりました。ありがとうございました。
鬼頭信貴君には、本研究をはじめとして研究室生活等さまざまな場面で 協力していただき本当に感謝しております。 また鈴木考行君、不破洋平君、小酒井一稔君には、本研究に関して多くの助言などを頂き、 大変参考になりました。ありがとうございました。
長尾研究室秘書の兼松英代さんには学生生活ならびに研究活動のための 様々なサポートをいただきました。この場を借りて御礼申し上げます。
A. 付録
A-1. 経路情報のログデータの一部
11_31_39,0.0,0.0,0.0,0.0,-0.25878263980793165,0.3458728870830016,-1.0,-1.0,-1.0,1
11_31_40,0.036,0.036,0.01,0.01,-0.811329052835125,0.9356286894799392,-1.0,-1.0,-1.0,1
11_31_40,0.396,0.288,0.13,0.1,-0.5175664210569538,0.6310260019798545,-1.0,-1.0,-1.0,1
11_31_41,1.152,1.008,0.34,0.29,-0.87428000627806,-0.48009204437502573,-1.0,-1.0,-1.0,1
11_31_41,2.052,1.872,0.61,0.55,-0.734389988539663,-1.652585613134779,-1.0,-1.0,-1.0,1
11_31_42,1.836,1.8,0.82,0.8,-0.5525375780334226,-4.3895005523187285,-1.0,-1.0,-1.0,1
11_31_42,1.692,1.584,1.15,1.05,-0.846301709194518,-7.519449589690334,-1.0,-1.0,-1.0,1
11_31_43,3.528,3.276,1.43,1.33,-0.26577675728733274,-11.422737123644456,-1.0,-1.0,-1.0,1
11_31_43,1.332,1.224,1.68,1.56,0.23080946867264843,-14.434971469408923,-1.0,-1.0,-1.0,1
11_31_44,1.512,1.548,1.9,1.77,0.23080946867264843,-16.081132746221055,-1.0,-1.0,-1.0,1
11_31_44,1.692,1.476,2.09,1.98,0.2517924403127728,-18.072306885340833,-1.0,-1.0,-1.0,0
11_31_45,1.26,1.224,2.3,2.17,1.000246241135106,-14.79363481442361,-1.0,-1.0,-1.0,0
11_31_45,-0.468,1.26,2.31,2.29,0.8813225982203516,-11.14628193249545,-1.0,-1.0,-1.0,1
11_31_46,0.108,0.252,2.34,2.32,0.20982655519251897,-9.633284058860763,-1.0,-1.0,-1.0,1
11_31_46,0.648,0.576,2.44,2.41,-0.13988268518008298,-8.826790167317064,-1.0,-1.0,-1.0,1
11_31_47,1.332,1.224,2.64,2.59,-0.6224802958648343,-9.049877352240879,-1.0,-1.0,-1.0,1
11_31_47,2.232,2.052,2.94,2.95,0.6085145844554506,-10.919359014188066,-1.0,-1.0,-1.0,0
11_31_48,1.692,1.8,3.21,3.2,1.6929209725552705,-5.587211064982801,-1.0,-1.0,-1.0,1
11_31_48,0.612,1.512,3.25,3.36,1.4200216408029975,-3.3299700978614486,-1.0,-1.0,-1.0,1
11_31_49,0.252,0.324,3.32,3.42,0.6155094055299547,-1.6437705716019044,-1.0,-1.0,-1.0,1
11_31_49,1.152,1.008,3.47,3.6,-0.03497075206670905,-0.15049671333505105,-1.0,-1.0,-1.0,1
11_31_50,1.368,1.332,3.79,3.86,-0.2797649951643125,1.377922759197352,-1.0,-1.0,-1.0,1
11_31_50,3.996,3.852,4.05,4.19,0.1538723821782887,1.6118443536931155,-1.0,-1.0,-1.0,1
11_31_51,1.368,2.016,4.37,4.44,0.5945249784817448,2.1954527773598755,-1.0,-1.0,-1.0,1
11_31_51,2.88,2.448,4.75,4.82,0.7903841678364422,3.195731315408325,-1.0,-1.0,-1.0,1
11_31_52,2.412,2.412,5.05,5.14,1.098187228676002,4.183854968131602,-1.0,-1.0,-1.0,1
11_31_52,1.836,1.872,5.35,5.44,2.049855218422396,3.626885226734875,-1.0,-1.0,-1.0,1
11_31_53,2.268,2.772,5.61,5.72,2.469890923905523,3.8994110344585096,-1.0,-1.0,-1.0,1
11_31_53,1.116,1.116,5.68,5.83,2.2598565166571825,5.053670002908833,-1.0,-1.0,-1.0,1
11_31_54,0.144,0.144,5.71,5.86,2.13385194619258,6.036817680079677,-1.0,-1.0,-1.0,1
11_31_54,0.252,0.288,5.72,5.88,2.0218573945032703,6.730212559881272,-1.0,-1.0,-1.0,1
11_31_55,0.252,0.288,5.77,5.94,2.028856800395,7.061642963120757,-1.0,-1.0,-1.0,1
11_31_55,0.036,0.0,5.78,5.94,1.916870233433589,7.573722943501392,-1.0,-1.0,-1.0,1
11_31_56,0.0,0.0,5.78,5.94,1.8818761127424501,7.763082832695524,-1.0,-1.0,-1.0,1
11_31_56,0.0,0.0,5.78,5.94,1.6439360525183586,8.124631409944309,-1.0,-1.0,-1.0,0
11_31_57,0.0,0.0,5.78,5.94,1.4410125107454745,12.676296767420885,-1.0,-1.0,-1.0,0
11_31_57,-0.072,0.036,5.76,5.96,1.1331670594132464,18.835794183481934,-1.0,-1.0,-1.0,0
11_31_58,-0.144,0.252,5.74,6.01,0.7064432274459405,26.426001960036764,-1.0,-1.0,-1.0,0
11_31_58,-0.288,0.54,5.69,6.13,0.6854583043514817,36.814098953732575,-1.0,-1.0,-1.0,0
11_31_59,-0.144,0.432,5.66,6.18,0.7624036263823624,46.50658289994035,-1.0,-1.0,-1.0,0
11_31_59,-0.288,0.504,5.62,6.25,0.6155094055299547,55.78891648769245,-1.0,-1.0,-1.0,0
11_32_00,-0.18,0.396,5.59,6.33,0.3916806120348517,65.75301485003158,-1.0,-1.0,-1.0,0
11_32_00,-0.36,0.612,5.54,6.4,0.384686126210808,76.08563604507228,-1.0,-1.0,-1.0,0
11_32_01,-0.252,0.432,5.5,6.49,0.21682085339741855,86.37604613042646,-1.0,-1.0,-1.0,0
11_32_01,-0.288,0.54,5.44,6.57,0.03497082762795202,96.84899884572852,-1.0,-1.0,-1.0,1
11_32_02,-0.396,-0.648,5.42,6.61,0.4546313956715639,97.63543480290797,-1.0,-1.0,-1.0,1
11_32_02,-0.216,-0.144,5.34,6.55,0.5735406583947614,99.11585539771819,-1.0,-1.0,-1.0,0
11_32_03,-0.792,0.756,5.25,6.49,-0.6014974195943404,106.81821906355458,-1.0,-1.0,-1.0,0
11_32_04,-0.756,0.288,5.19,6.53,-0.5595318246457045,116.22063302345889,-1.0,-1.0,-1.0,0
11_32_04,-0.324,0.216,5.13,6.57,-0.5525375780334226,126.14952751939035,-1.0,-1.0,-1.0,0
11_32_05,-0.432,0.396,5.07,6.62,-0.6084917056045183,136.9845302421126,-1.0,-1.0,-1.0,0
11_32_05,-0.36,0.288,5.01,6.67,-0.6854292736364036,146.9837375494123,-1.0,-1.0,-1.0,0
11_32_06,-0.504,0.468,4.95,6.72,-0.5735203339211578,158.15539896882402,-1.0,-1.0,-1.0,0
11_32_06,-0.504,0.576,4.85,6.81,-0.5525375780334226,168.8798783943254,-1.0,-1.0,-1.0,0
11_32_07,-0.288,0.18,4.78,6.86,-0.5875088652927277,-179.9661782898681,-1.0,-1.0,-1.0,1
11_32_07,-0.612,0.612,4.74,6.91,-0.6574518827801886,179.13424447376974,-1.0,-1.0,-1.0,1
11_32_08,-0.036,-0.036,4.73,6.9,-0.24479440724620208,179.4884576160042,-1.0,-1.0,-1.0,1
11_32_08,-0.216,-0.108,4.69,6.87,0.2517924403127728,-178.500470010628,-1.0,-1.0,-1.0,1
11_32_09,-0.576,-0.468,4.56,6.78,0.28676419660234487,-176.94989694426437,-1.0,-1.0,-1.0,1
11_32_09,-0.828,-0.684,4.43,6.66,0.3497138263436626,-175.85877576878926,-1.0,-1.0,-1.0,1
11_32_10,-1.116,-0.936,4.28,6.53,0.50359366110974,-174.44035348997983,-1.0,-1.0,-1.0,1
11_32_10,-0.72,-0.648,4.17,6.43,0.4826097719786117,-173.37957142913356,-1.0,-1.0,-1.0,1
11_32_11,-0.828,-0.72,4.05,6.32,0.29375856933193023,-172.2978914123948,-1.0,-1.0,-1.0,1
11_32_11,-0.864,-0.792,4.0,6.26,0.7414183717367495,-171.98617421790823,-1.0,-1.0,-1.0,1
11_32_12,-0.18,-0.18,3.96,6.25,0.4686205638106443,-172.05217257357194,-1.0,-1.0,-1.0,1
11_32_12,-0.288,-0.288,3.93,6.22,0.797379339953993,-171.3207604675037,-1.0,-1.0,-1.0,1
A-2. 経路情報XMLをPDA用に変換するXSLT
<?xml version="1.0" encoding="Shift_JIS"?>
<xsl:stylesheet version="1.0" xmlns:xsl="http://www.w3.org/1999/XSL/Transform">
<xsl:template match="place">
<html><body>
<h1><xsl:value-of select="title"/></h1>
<xsl:apply-templates select="description"/>
<h5>Commands for your AT</h5>
<p><table>
<tr>
<td>
<form method="GET" action="atc">
<input type="hidden" name="command" value="come"/>
<input type="submit" value="Come"/>
</form>
</td>
<td>
<form method="GET" action="atc">
<input type="hidden" name="command" value="stay"/>
<input type="submit" value="Stay"/>
</form>
</td>
</tr>
</table></p>
</body></html>
</xsl:template>
<xsl:template match="image">
<img>
<xsl:attribute name="src">
<xsl:value-of select="@small"/>
</xsl:attribute><br/>
</img>
</xsl:template>
<xsl:template match="br">
<br/>
</xsl:template>
</xsl:stylesheet>