
個人用知的移動体における個体間通信を利用した衝突回避
1 はじめに
本稿では、個人用の移動体を相互に協調的に動作させるために、 位置情報の利用とその通信形態の切り替えを利用したシステムを提案する。
通信により交換する情報は、その通信の目的によって異なる。 移動体相互の位置関係には、 周囲にどのような移動体がいるのかといった広域的な位置情報と、 近接する移動体と連係動作するために必要となる詳細な位置情報の2つがある。 これらは位置情報を交換する目的が異なるため、その交換頻度と交換する対象が異なる。
そこでまず位置情報の交換頻度により位置情報を分類し、通信の目的によって使い分ける方法を示す。 また、位置情報の交換対象により通信の形態を使い分ける方法を提案する。 さらに、個体間通信を用いた応用例として、それを用いた移動体同士の衝突回避の手法を提案する。 本稿では、AT(Attentive Townvehicle)と呼ばれる、各種のセンサおよび通信機能を備えた計算機を搭載した個人用の移動体を用いた。
2 個人用知的移動体AT
人用知的移動体AT(Attentive Townvehicle)は、搭乗者である人間や、自分を取り巻く環境に適応し、個体間通信によって協調的に動作可能な個人用の乗り物である。
ATは周囲の環境を認識するためにセンサを搭載している。これらのセンサはPCに接続されていて、情報の収集や制御に使用される。 またATは無線通信用のPCを搭載していて、他の無線通信機器と通信することができる。また、ATが位置情報などを取得したり集約して共有するために、複数のAT統括サーバが設置されている。
3 位置情報と個体間通信
3.1 位置情報の使用目的と頻度
AT同士が相互に連携動作をするためには、互いに頻繁に位置情報を交換する必要がある。 また、周辺のATを存在を教えるなどのサービスを可能にするには、複数のATの位置情報を一括して管理する必要がある。
AT同士が緊密に動作するために取得される位置情報と、AT同士のおよその位置関係を知るために取得される位置情報は、その 精度という観点において同等である。ここでいう、位置情報は、 平面上の座標(経度、緯度、高度)及び向きからなる。
しかし、必要とされる情報交換の頻度と交換する対象が異なる。 そこで本稿では、前者のように交換頻度が高い必要があるが特定の近接する対象とだけ交換をすればよい位置情報を詳細位置情報とし、 後者のように交換頻度は比較的重要ではないが多数の相手と交換する必要のある位置情報を広域位置情報と区別して呼ぶ。 この2つ違いは、交換対象と情報交換の頻度である。
広域位置情報は、付近にどのようなATがいるかを知ることが目的の情報である。 広域位置情報の交換頻度は比較的小さく、数秒に一度程度のものであればよいと考えられる。 一方、詳細位置情報は、AT同士が連携して動作を行うためのものである。 そのためには、より頻繁に位置情報を交換し合う必要があり、交換される頻度は極めて高い。
3.2 位置情報の取得
ATでは自身の位置を計算するために、二つの手法を併用して求める。 ひとつは、地面に埋め込まれたRF-IDタグを用いた位置情報の取得であり、もうひとつは、 ATに搭載された走行距離計および3軸センサを用いて推定した位置情報である。
統括サーバはRF-IDタグのIDとそれに対応する位置情報を管理している。 ATがIDタグの上を通過することで取得したIDを用いてサーバに問い合わせを行うと、ATはそのタグの位置、つまり自身の位置を知ることができる\cite{sahashi}。
また、3軸センサから向き、走行距離計から走行距離を取得することができる。 ある時点の位置から、進行方向と走行距離を用いて次の時点の位置を計算することを繰り返し、ATの位置を推定する。
あるタグを読み取ってから次のタグを読み取るまでの位置情報をこの位置推定により補完することにより、連続的な位置情報を取得する。
3.3 通信の種類と位置情報
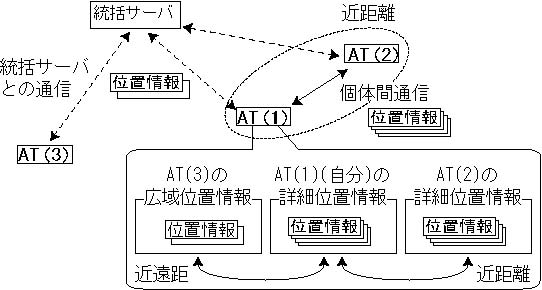
図1: ネットワーク概要図
ATが他のATと位置情報を交換する方法は、その目的に応じて2つある。
ひとつは、統括サーバを経由した通信である。 この方法では、データは統括サーバで処理された後、各ATに配信される。 付近に存在するATの一覧を取得するために広域位置情報を利用する際に使用される。 まず、ATは自身の広域位置情報を統括サーバに登録する。 すると、統括サーバは登録されている位置情報からそのATの近くに存在するATの一覧を出力する。 これを用いて、周囲一定距離以内にいる複数のATの広域位置情報を取得する。 もうひとつは、AT同士で直接通信を行う個体間通信である。 この方法ではデータは統括サーバを経由せず、相手のATと直接1対1で通信を行う。 相互に詳細位置情報を送りあい、互いの正確な位置関係を取得する際に使用される。
3.4 位置情報による通信の切り替え
まずATは自身の位置を広域位置情報として統括サーバに登録する。 すると、統括サーバは、付近のATの広域位置情報と通信に必要な情報を通知する。 ATはこの広域位置情報を基にして、どのATがどれぐらい近くにいるのか知ることができる。 一定距離以内にいるATに対して、統括サーバから示された情報をもとに、個体間通信を開始する。 詳細位置情報を交換し合い、協調的な動作を行う。 そして距離が一定以上離れたら個体間通信を終了する。 個体間通信を行っている間も、統括サーバ経由の通信は継続される。
4 個体間通信と衝突回避
ATに搭載された距離センサにより、周囲の障害物を検出することができる。 位置を計算することにより、地図と比較して既知の障害物との衝突を防ぐことができるようになる。
さらに、個体間通信を用いると移動体相互の位置関係を把握するだけでなく、衝突の可能性が高い場合に双方の移動体がそのことを知ることができる。 それは移動体の搭乗者に、他の移動体に衝突する可能性があるだけでなく、他の移動体が衝突してくる可能性があること通知することができる。 これは衝突される側にも衝突回避のためにできることを増やすことにつながる。 双方に対する警告は位置情報の交換によっても実現されるが、それに加え、衝突の警告を個体間通信で送ることによっても実現できる。 この仕組みによって双方の移動体が行うことができる動作の選択肢が増える。 このような緊急でかつ対象の限られた情報を伝達する手段としても個体間通信は有用である。
個体間通信による位置情報の利用例として、ATの衝突回避の具体例について提示する。 ATの動作を考えると、 その場で回転することができ、頻繁に向きを変えことができる。 したがって、長期的かつ詳細な移動経路の推定は求められず、短期的で幅のある移動経路を推定する必要がある。
そこで、ATの性能を元にATが特定の時間内に到達できる距離を推定し、円で近似した。 AT間通信によって収集した他ATとの位置情報を基に、衝突の可能性を計算する。 他のATと一定時間内に衝突する可能性のある場合は、双方のATの搭乗者に警告を行う。
5 まとめと今後の課題
本稿では、個体間通信により相互の位置情報を交換し、また位置情報をもとに通信の方式を切り替える手法を提案した。 また、個体間通信を利用して協調的に動作させる例として、衝突回避を行う手法を提案した。 今後の課題として、個人適応による回避動作の決定が挙げられる。 ATは個体間通信により相手の情報を取得することができる。 搭乗者の有無や状態、操作の習熟度という情報を利用することで、どの程度まで接近していいのか、 あるいはどちらの動作を優先すべきかという判断ができると考えられる。