
交差点エリアの自動走行制御による交通事故防止システム
1 はじめに
近年、車などの移動体が携帯情報端末のようにユビキタスな通信機能を持ち、移動体間または周囲の環境との協調による安全で快適な社会の実現が期待されている。この安全で快適な社会の実現のために、現在の自動車社会の問題である交通事故や交通渋滞を解決するための研究が行われている。交通事故の多くは、信号無視や見通しの悪い交差点での出会い頭による衝突事故など、交差点付近で発生しており、交差点における交通の円滑化が必要である。
本論文では、交差点付近での移動を自動走行にし、交差点進入前に個々の移動体の速度を調整することで交差点を安全かつ必要最低限の加減速でスムーズに通過する仕組みを提案する。
2 交通事故の現状
平成17年度の事故類型別および道路形状別、法令違反別の事故件数を図に示す。
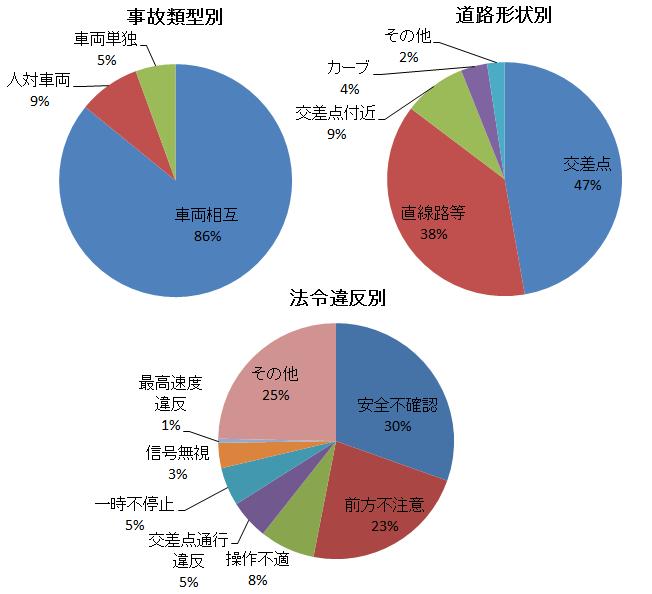
図1: 交通事故件数
交通事故件数を事故類型別にみると、車両相互事故が8割以上を占めている。その中でも追突事故及び出会い頭衝突が全体の約6割を占めている。また、道路形状別にみると、交差点が全体の約半分を占めており、交差点での車両の交通が道路交通問題として重要であることがわかる。
法令違反別では、安全不確認が約3割を占め最も多く、信号無視や一時不停止など交通規則を意図的に守らなかったものと、前方不注意や操作不適などのヒューマンエラーによるものがある。このように交通事故の9割以上は運転者に依存するものである。
3 交通管制の問題点
今日に至るまでの移動体の交通を円滑にするための交通管制は、交差点に設置された信号機や交通標識などを利用して、インフラ側から移動体の運転者に規制内容を伝達し、規制の尊守を促すことによって行われている。
この交通管制が機能するには、運転者が標識の意味等の一般的な交通規則を記憶・理解した上で、その規制に従って各運転者が移動体を運転・操作することが必要となる。このような交通管制が実施されているにもかかわらず交通事故が発生する場合としては、前章で述べたように、運転者がインフラ側から指示された交通規制を守らなかった場合と、運転者の特性(初心者や高齢者、障害者など)によって適切な判断・認知・操作ができず、交通規制を守れなかった場合が考えられる。
これらに対しては、従来、車車間通信や路車間通信などを利用して取得した情報に基づき、速度超過や交錯可能性のある移動体の存在を運転者に警告する手法や、場合によっては移動体側から自動的に減速制御を行うなどの運転者の運転操作を支援する手法が提案されている。しかし、このような従来手法では、相互に交錯可能性を有すると判断された移動体間に交差点進入に関するルールが設定されていない限り、交差点に進入する移動体の双方に減速制御が与えられ、交差点での走行が円滑でなくなる可能性がある。
また、現在の交通管制の別の問題点は、制御内容が固定的であって、交通量の変化等に動的に適応できない点である。一部では、交通量によって信号機の点灯時間を変えるといった手法も実現されている。しかし、狭い範囲内での制御に過ぎず、交通管制内容をリアルタイムに変えているとまでは言い難い。管制内容が固定的であると、交錯する移動体が存在しない場合であっても赤信号や一時停止線で不要な一時停止や減速をしなければならないこととなり、円滑な交通の妨げとなるという問題がある。
4 交差点エリアにおける交通事故防止システム
本論文では、交差点における従来の交通管制の問題点を解決する手法を提案する。これは、交差点付近の移動体を、移動体統括サーバと呼ばれる移動体の特性と状況を動的に管理するサーバとの通信により自動的に走行制御することで、運転者の特性に関わらずヒューマンエラーや交通違反による交通事故を無くし、交差点進入前に個々の移動体の速度を調整することで柔軟な交差点走行を可能とするものである。
4.1 交通管制アルゴリズム
移動体統括サーバは交差点付近に存在する移動体の情報(位置、速度、目的地までの走行経路、サイズ、走行性能)に基づき、交差点に進入する移動体の交差点通過スケジュールを作成し、各移動体の交差点エリアでの走行制御を計算する。
まず、統括サーバは移動体が交差点エリアに進入したとき、交差点への到達予想時間が近い移動体でグループ化し、そのグループで交差点通過スケジュールを作成する。交差点エリアの範囲は制限速度に応じて、十分な速度調整が可能な距離を設定する。グループ化された時点で移動体は自動走行に切り替わる。ここでは通信遅延や計算時間を考慮し、移動体は進入速度を維持または追従走行を行う。
通過スケジュール作成と同時に算出された加減速の制御情報を各移動体に送信し、移動体は交差点進入までに制御情報に従った加減速を行う。交差点内は進入速度を維持したまま、経路情報に応じて設定された走行経路を走行する。交差点通過後は、加減速制御を行い交差点エリア進入時の速度に戻し、自動走行を解除する。
4.2 交差点通過スケジュールの作成
まず、交差点内の走行経路間で移動体の交錯する範囲を設定しておく。この範囲を接近エリアと呼び、移動体のサイズや移動誤差を考慮して十分な大きさを設定する。接近エリアごとに移動体が通過する時間を割り当てることで、交差点の通過スケジュールを作成する。接近エリアおよび交差点通過スケジュールの例を図に示す。
最適な通過スケジュールは全ての移動体が速度制御を行わずに通過できるものである。この通過スケジュールで重複する移動体が存在する場合、交差点進入前に加減速制御を行うことで通過時間をずらし、衝突しない通過スケジュールの候補を作成する。グループの移動体の台数や接近エリア数が多いほどスケジュール候補が多くなるため、計算時間が増大する。そこで、通過時間をずらす移動体をある程度決めておくため、移動体の優先度を設定しておく。優先度は交差点通過速度、通過する接近エリア数で決定される。交差点通過速度が速く、通過する接近エリア数が少ない移動体は優先度が高く設定される。この優先度の高い順から通過時間を決定していく。通過時間をずらす際の加減速制御は、加減速による搭乗者の感じる不快感を考慮して加速度の変化が小さくなるように決定する。
作成された通過スケジュールの候補から通過スケジュールを決定するため、各候補のコストを全移動体の単位時間当たりの加速度の変化分の合計として計算する。このコストが最小のものを通過スケジュールとする。このコストが同じ場合、交差点エリアの通過時間の合計をコストとして、最小のものを通過スケジュールとする。つまり、第1に搭乗者の快適性、第2に交通の流れを考慮した交差点通過を実現する。
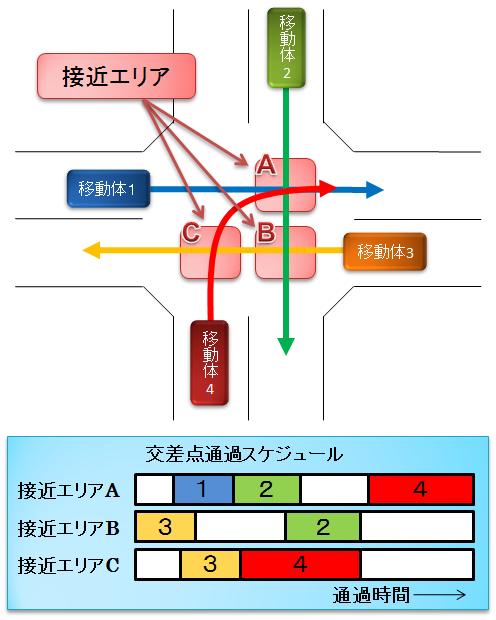
図2: 接近エリアと交差点通過スケジュール
5 まとめと今後の課題
本論文では、交差点付近での移動を自動走行にし、交差点進入前に個々の移動体の速度を調整することで交差点を安全かつ必要最低限の加減速でスムーズに通過する仕組みを提案した。
今後の課題としては、評価実験が挙げられる。具体的には、交差点交通を提案する手法によりモデル化し、そのモデルによるシミュレーションと信号機を用いた現行システムとの比較によりモデルの検証を行う。また、複数の移動体の実機を用いた実験により、位置測定精度や走行制御性能などの技術的な問題を考慮した提案システムの性能評価を行い、実現可能性について検討する。