
個人用知的移動体による自動走行と障害物回避
1 はじめに
我々はユビキタスネットワーク社会の到来を迎え、多彩な情報を検索し取得することが日常的なものとなった。しかし、情報を得るだけでは結果を物理的に反映させることができず、我々は自身で行動を起こさなければ結果から成果を得ることはできない。そこで我々は、日常生活において最も基本的で重要な要素の一つである「移動」に着目し、乗り物を情報端末化することで情報処理と人間の物理的な移動を連動させる搭乗型コンピューティングのコンセプトに基づいて、AT(Attentive Townvehicle)と呼ばれる個人用知的移動体を開発している。
本論文では、ATが自動走行を行う上で必要な障害物の自動回避を安全で効率的に行うために、障害物が静止しているか、移動しているかを判別して、それに適したタイミングで回避するための手法を提案する。
2 個人用知的移動体AT
ATは、搭乗者である人間や、AT自身を取り巻く環境に適応して移動する個人用の乗り物である(図1参照)。ATの最大の特徴の一つは、全方位に移動できることである。オムニホイールと呼ばれる複合車輪を用いることによって、移動体の向きを変更することなく、任意の方向に移動することができる。
システム構成を図2に示す。ATにはモータ制御用PC、センサ用PC、コンソール・カメラ用PC、自動走行および衝突回避用PCという、4台のPCが搭載されている。これらは互いに無線によって接続されており、モータ制御用PCは、モータコントローラを介してモータのトルクを調節するシーケンサに有線で接続されている。
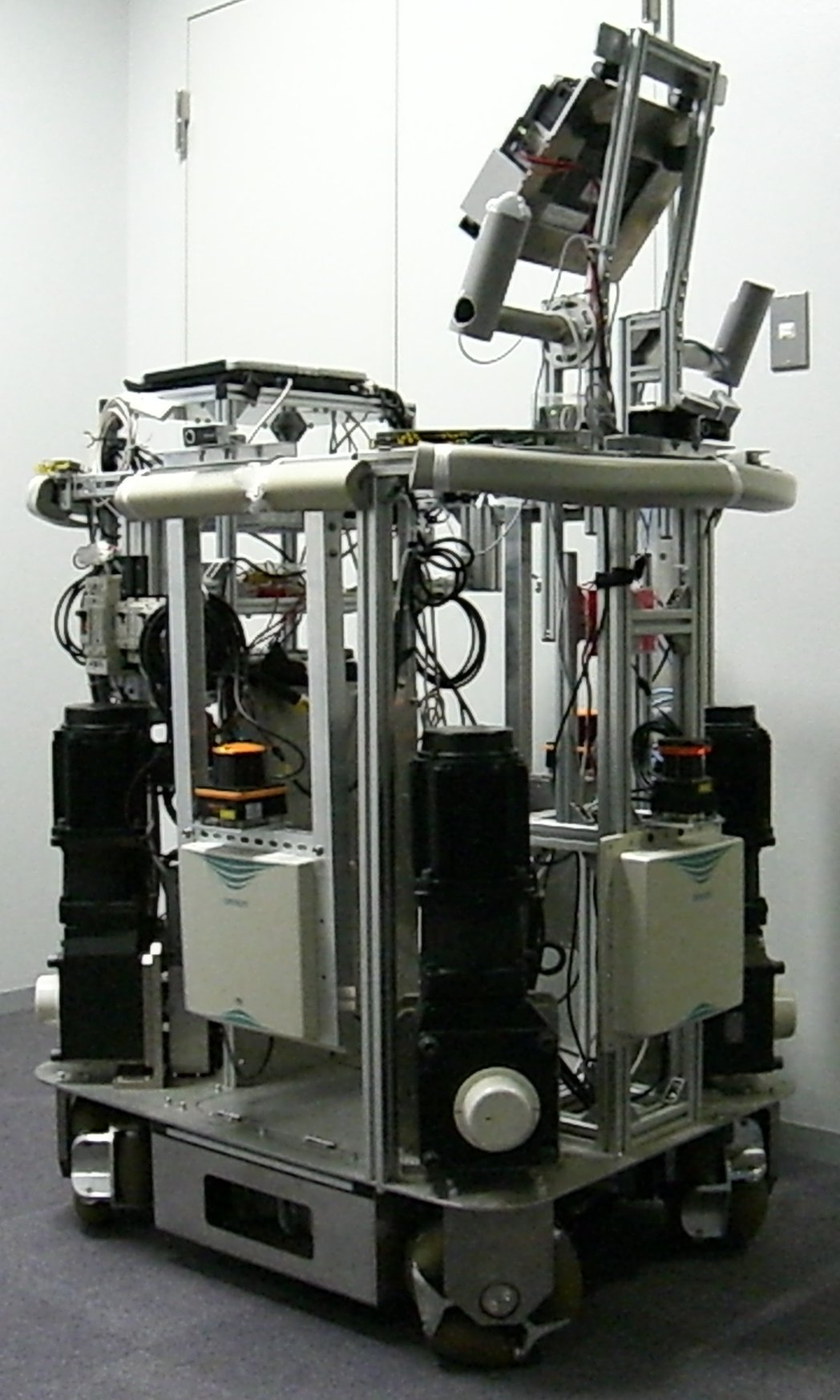
図1: 個人用知的移動体AT
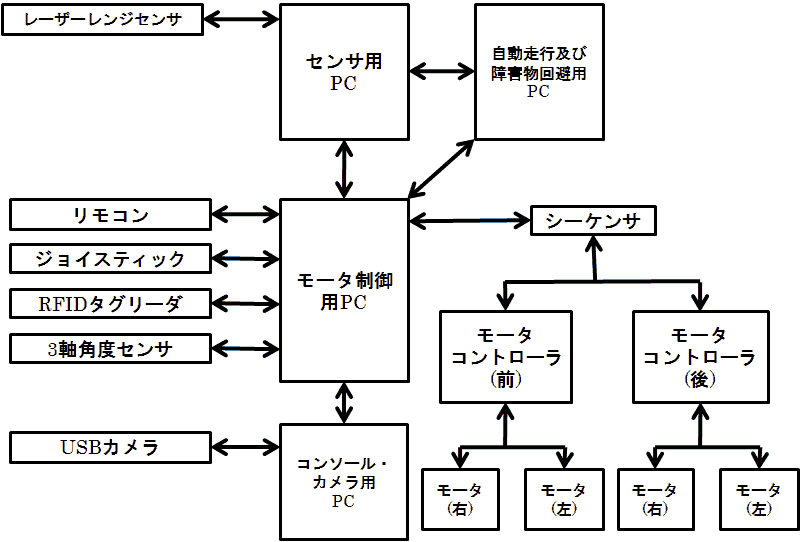
図2: システム構成
建物内には地図サーバやモーションセンササーバが設置されており、ATはそのサーバと随時通信を行いながら移動する。
3 個人用知的移動体の自動走行
3.1 基本動作
ATは以下に挙げる5つの基本動作(以下ではプロセスと表記する)を組み合わせて自動走行を実現している。
3.2 基本動作の組み合わせ
上で述べた基本動作を組み合わせることによって、交差点の右左折、交差点の直進、突き当りの壁での右左折といった動作が可能になる。
4 障害物の自動回避
4.1 自動走行時のモード
ATの自動走行には、3章で述べた機能を用いながら壁沿いを走行し、決められた経路をたどる壁沿い走行モードと、障害物を回避するための障害物回避モードの二つのモードが存在する。
壁沿い走行モードでは、決められた経路を、壁沿い走行・交差点右左折などの動きを組み合わせることによって、自動的に走行する。
障害物回避モードでは、基本的には障害物を避け、空いている空間に移動しようとするが、人間のような移動障害物が存在した場合、その移動ベクトルを計算し、その移動障害物がこれから通るであろう場所には入りこまない仕組みなっている。
壁沿い走行モードでは壁に近づく必要があり、障害物回避モードでは動作の過程で壁から離れるようになっているため、二つの機能は相反するものとなっており、そのため両立することはできず、切り替えを行う必要がある。壁沿い走行モードのみで走行した場合は図3のような経路を走行し、壁沿い走行モードから障害物回避モードに切り替えた場合は図4のような経路を走行する。図4の経路の方が効率的であることが分かる。
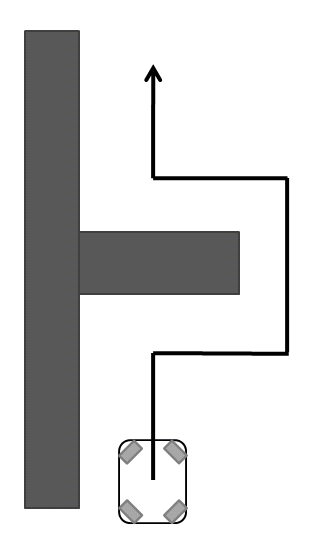
図3: 壁沿い走行モードのみの場合
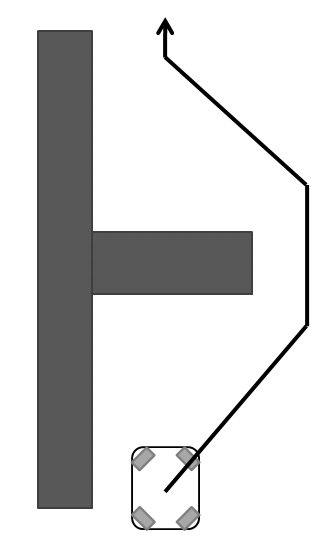
図4: 障害物回避モードに切り替えた場合
4.2 障害物の検出
静止障害物を検出する場合は、レーザーレンジセンサを用いる。静止障害物がATの進行方向上の、ATの幅分で3m以内に確認されたときに、静止障害物が見つかったと判断する。
静止障害物ならばある程度近づいてから回避しても問題はないが、移動障害物はそれ自身が移動しているため、ある程度近づいてしまうと、衝突の危険があるからである。移動障害物の場合は、静止障害物よりも距離の長い10mの地点で回避を開始することが妥当であると考えられる。
本研究で移動障害物の検知に使用したのは焦電センサ(焦電型MPモーションセンサNaPiOn)である。焦電センサは、周囲と温度差がある人や物が動く際に発生する赤外線の変化を検出するセンサである。これを用いることで、静止障害物か移動障害物かを判断する。この焦電センサを建物内のさまざまな場所に設置した。
焦電センサの前を人間が通った場合、焦電センサは人間が移動したことによる赤外線の変化を検知する。焦電センサはモーションセンササーバというプログラムが管理しており、焦電センサが取得した値を保持し、取得したデータからその人間の速度を3段階で推定している。ATがモーションセンササーバに問い合わせを行うことで、ATは人間の速度、向き、通過時刻を取得することができる。
4.3 モードの切り替え
壁沿い走行モードと障害物回避モードの切り替えは、ATの自動走行を実現する上で必須の機能である。適切なタイミングで壁沿い走行モードと障害物回避モードを切り替えられることが、自動走行を効率よく行うことができるポイントとなる。
壁沿い走行から障害物回避モードに切り替えるタイミングは、静止障害物の場合は、障害物がATの進行方向上3mまで接近したときにである。移動障害物の場合は、モーションセンササーバに問い合わせた結果から遭遇予想時刻を計算し、その時間にATの進行方向上10m以内に障害物を発見した場合、それを移動障害物とみなす。
障害物回避モードは、安全のために壁沿い走行モードに比べて速度が低く設定されているため、より早く目的地に到着しようと考えるならば、なるべく早く壁沿い走行モードに戻す必要がある。ただし、周囲の状況を観察し、安全だということが確認できなければ壁沿い走行に戻ることはできない。障害物回避モードから壁沿い走行モードに切り替える条件は、以下の二つである。
-
移動障害物モードに切り替わる前に右壁沿い走行をしていた場合は0°から90°の範囲、左壁沿い走行をしていた場合は-90°から0°の範囲の最短距離でレンジセンサが壁を検出した場合
-
ATの全方向一定距離以内の移動ベクトルが検出されなかった場合
5 今後の課題
ATに搭載されているレーザーレンジセンサは、周囲の状況の認識や、壁沿い走行、障害物回避などに使用されている。障害物回避を行うとき、これまではATが事前に正面にある障害物の存在を認識していることが前提となっていた。しかし、予期しない障害物、つまり、物陰から突然現れた移動障害物に対しては対応することができない。現在焦電センサは、直線上でATと人間が互いに近づいている場合の、人間の存在の確認、速度推定、それを利用した障害物回避にしか使用されていないが、将来的には交差点など、レーザーレンジセンサの死角となるような場所に焦電センサを設置し、突然現れる人間の回避にも役立てる予定である。