
個人用知的移動体のジェスチャインタフェースに関する研究
1 はじめに
近年、ジェスチャ認識デバイスの発達によりジェスチャ技術が急速に発達してきている。非接触型ユーザーインタフェースとしてのジェスチャは、ボタン等の使用より直感的であり、さまざまな分野への応用が期待されている。
我々の研究室では、個人用知的移動体AT (Attentive Townvehicle)と呼ばれる、自動で移動する個人用の乗り物の研究開発を行っている。このATは従来の乗り物とは異なり、全方位平行移動やその場回転を行うことができる。そのため、ATの操縦方法も従来の乗り物とは異なってくる。そこで、本研究ではより搭乗者の直感に合った操縦インタフェースとして手のジェスチャを利用する仕組みを実現した。
2 個人用知的移動体AT
ATは搭乗者である人間やAT自身を取り巻く環境に適応して移動する個人用の乗り物である。このATの特徴として、駆動系にメカナムホイールという機構を採用していることが挙げられる。このメカナムホイールは、図のように車軸に対して45度傾けられた小型のローラーが車輪の周囲に複数取り付けられた構造となっている。この機構によりATは、全方位平行移動とその場回転を行うことができ、より効率的な移動が可能となる。
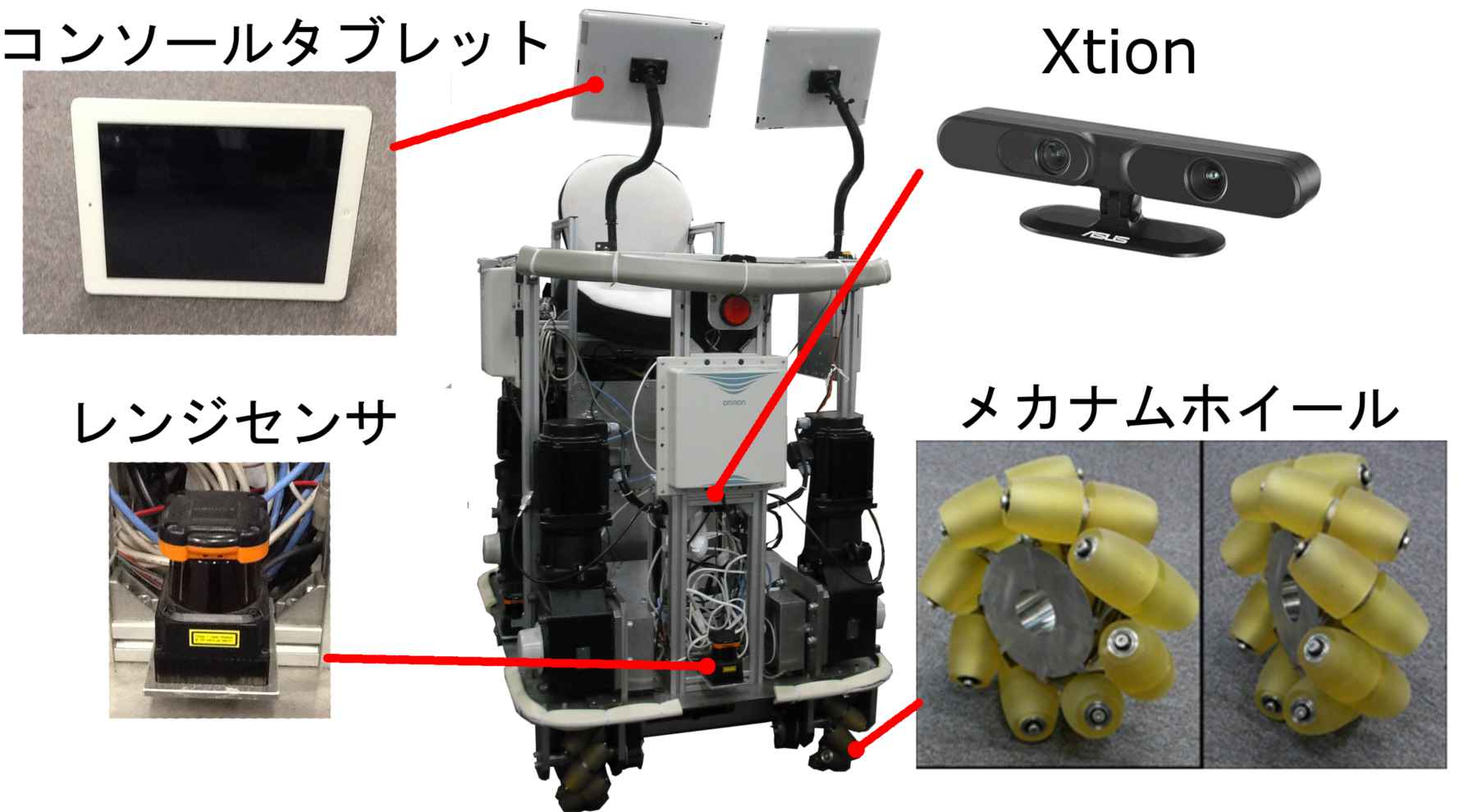
図1: 個人用知的移動体ATの構成
また、ATにはレーザレンジセンサが搭載されており、ATの周囲の障害物までの距離を取得することができる。この値を利用して、障害物を自動的に回避しながら移動する補助走行機能が実現されている。
本研究ではATの操縦方法として、図に示すXtionと呼ばれる深度センサデバイスを用いたジェスチャによる操縦を実現した。Xtionにより、ATは周囲の深度情報を取得することが可能となる。ジェスチャで操縦を行うことにより、搭乗者はより直感に合った操縦をすることが可能となる。
3 個人用知的移動体のジェスチャインタフェース
深度センサを用いることで、ATはセンサ周囲の対象物までの深度情報を取得することができる。ATはこの情報を元に搭乗者の手を認識し、ジェスチャ認識を行う。また、搭乗者のジェスチャがどのように認識されているのかといった情報を搭乗者に提示することで、スムーズにジェスチャ操作ができるように工夫している。
3.1 操作方法
ATには全方位平行移動とその場回転の2種類の動作がある。そこで、ジェスチャはそれら2種類の動作に対応したものにする必要がある。そこで、図に示すように、搭乗者が平行移動を行いたい場合は手の形状をグーにし、その場回転を行いたい場合は手の形状をパーにする。それぞれの形状のまま手を動かすことでATを操作する。
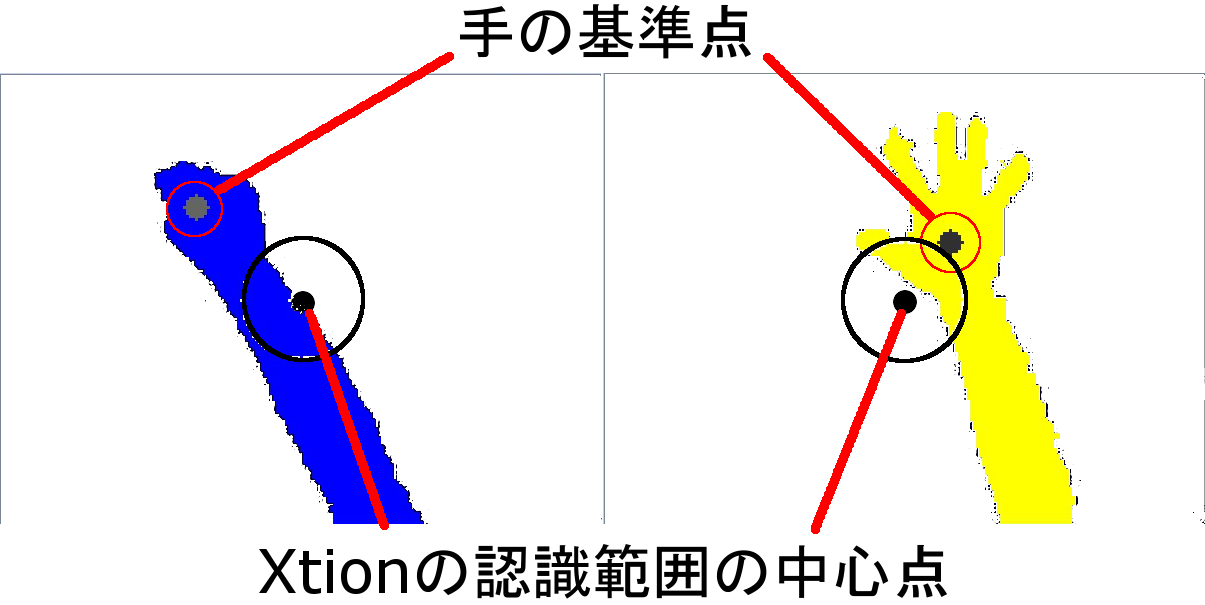
図2: グーとパーによる動作の切り替え
搭乗者の手の形状がグーかパーかを識別した後、図で示している手の基準点の座標と図の中心の点で示しているXtionの認識範囲の中心点の座標の差分を計算し、ATの進行方向、速さ、回転方向を決定する。
また、ジェスチャ操作によって全方位平行移動を行う場合、ATの進行方向を固定する機能を追加した。これは、手を同じ位置に保持し続けることは搭乗者にとって負担であると考え、搭乗者が一度進みたい方向をATに伝えてしまえば、搭乗者の手がXtionの認識範囲から外れても搭乗者の進みたい方向にATが進み続けるというものである。なお、通常のジェスチャ操作では搭乗者の手がXtionの認識範囲から外れるとATが停止するようになっている。
3.2 搭乗者への情報提示
本研究では搭乗者に対して情報提示を行う手法として、図のようなアニメーショングラフィクスを用いる仕組みを考案した。この情報はATのコンソールタブレットに表示される。
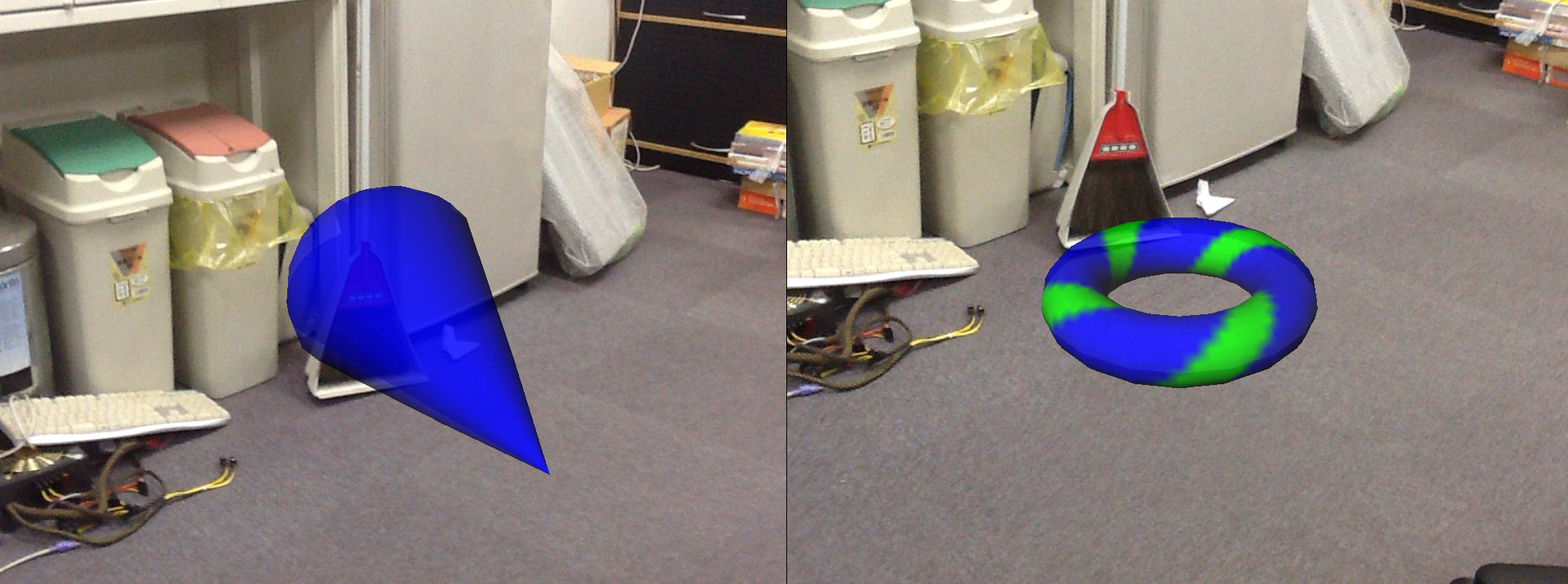
図3: ATの動作情報を伝える2つのグラフィックオブジェクト
搭乗者の手がグーと識別された場合は、図の左の円錐型のオブジェクトが表示され、搭乗者がATを移動させようとした方向をオブジェクトが指し示す。一方、搭乗者の手がパーと識別された場合は図の右のリング型のオブジェクトが表示される。搭乗者がATをその場回転させようとしている向きに、このオブジェクトをアニメーションによって回転しているように見せることで搭乗者への情報提示を行う。
搭乗者の手がXtionの認識範囲から外れるとこれらのオブジェクトは表示されなくなる。しかし、搭乗者がジェスチャ操作を行っている際に、搭乗者の意図とは異なり、手がXtionの認識範囲から外れることも起こり得る。そこで、これらのオブジェクトを搭乗者の手がXtionの認識範囲の中心から離れるにつれて徐々に透明化させ、搭乗者の手がXtionの認識範囲から外れようとしているかどうかの情報提示も行う。
また、2章で述べたようにATはレンジセンサにより周囲の障害物までの距離情報を取得している。この情報を利用して、ATの周囲の一定距離内に障害物があれば、その大まかな方向を搭乗者に提示する。さらに、補助走行機能によりATが障害物を自動回避している場合、その情報も搭乗者に提示する。障害物に対する情報提示画面を図に示す。
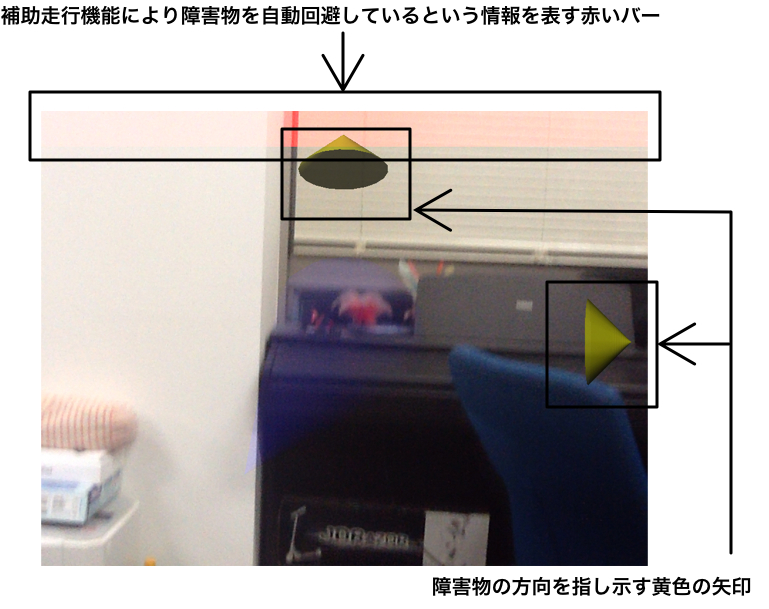
図4: 障害物情報の提示
4 おわりに
本研究では個人用知的移動体の操縦インタフェースとして手のジェスチャを用いる仕組みを実現した。
この仕組みと、これまでに行われてきた、ジェスチャによって周囲の機械を操作する研究を組み合わせることで、ジェスチャ認識の環境ごと移動し、周辺機器と通信を行うことで、あらゆる機械を一つのジェスチャ認識デバイスで操作可能にする仕組みが実現できると考えられる。
また、搭乗者に対する情報提示をATのコンソールタブレットで行うため、ジェスチャ操作に慣れていない搭乗者はコンソールタブレットばかりに注目してしまい、ATの周囲に対する注意力が低下すると考えられる。そこで、搭乗者に対する情報提示を透過型のヘッドマウントディスプレイによって行うことで、搭乗者に対してより効率的な情報提示を行うことができると考えられる。