
個人用知的移動体による実世界情報の獲得とその利用
1 はじめに
情報端末の発展と小型化に伴い、多くの人が携帯電話などの情報端末を持ち歩くようになった。このため、場所や時間、状況に応じたさまざまな情報サービスを享受することができるようになった。しかし、これらの情報端末は小型ゆえにセンサ類などの機能や情報処理能力が乏しく、周囲の状況を即座に把握できず、依然として使用者の入力に依存する面が大きいなどの欠点がある。そこで我々は、移動体、周囲の状況を取得するセンサ類、そして情報端末の3つを統合して情報処理と人間の物理的な移動を連動させるという考えのもと、AT(Attentive Townvehicle)とよばれる個人用知的移動体を開発している。
本研究では、ATが周囲に存在するオブジェクトを検出するための仕組みを新たに提案し、取得したオブジェクトの位置と情報をAT自身に反映させることを目的としている。
2 個人用知的移動体AT
ATは、搭乗者である人間や、それを取り巻く環境に適応して行動することができる個人用の乗り物である。ATは周囲の環境を認識するために多くのセンサ類を搭載している。またATは情報端末の機能を持ち、センサ類から得られたデータと地図情報を利用して目的地までの自動走行が可能である。
ATは搭乗者にとって直感的で分かりやすい操作を目指している。駆動系にはオムニホイールを用いて全方位への平行移動とその場回転が可能であり、また各種設定と情報の閲覧にはタッチパネル、マニュアル操縦にはジョイスティックを利用している。
図1: 個人用知的移動体AT
3 ATによる実世界情報の獲得
ATが搭乗者の要求に応えて移動するための第一段階として、搭乗者にとって有意なオブジェクトが周囲に存在することをATが知ることが必要である。オブジェクトのおおまかな位置把握には、インフラから取得できる地図情報を利用することができるが、ATは移動体であるため地図上での自身の位置把握に誤差が生じやすく、地図情報だけではATから見たときの対象物の詳細な位置を知ることができない。そのため、オブジェクトそのものに他のオブジェクトとの分別が可能な識別子を取り付け、ATがそれらの位置をリアルタイムに直接識別する仕組みが最も有効である。
3.1 赤外線LEDを利用したオブジェクトの検出
オブジェクトに取り付ける識別子は、実世界に設置することを考えたとき、できる限り小型で目立たず、かつATが離れた距離からでも識別できるものが理想である。
そこで本研究では、IDをエンコードした赤外線LEDタグを利用する。可視光フィルタを装着したカメラで撮影すると、赤外線LEDから発せられる赤外線が白色、その他の光は遮断され黒く観察される。このカメラから得られた画像から、画像処理によって白色部分を検出することで赤外線タグの位置を検出することができる。この検出はグレースケール画像で実行可能であり、AR Toolkitで用いられるような可視光画像からマーカーを検出する方法よりも処理が容易で高速に実行可能であり、誤識別の問題も発生しにくい。さらに画像上の赤外線タグの位置を取得するため、カメラの視野角とカメラ上のタグの座標を対応づけることで対象物の詳細な方向を知ることもできる。また赤外線LEDは高速に点滅を行うことができ、専用の受光回路でIDを取得することができる。
赤外線LEDを用いた赤外線タグは、点灯させるために電源が必要ではあるが、赤外光のみを透過するフィルタによって覆い隠すことができ、検出できる距離はLEDの明るさに依存するため調整可能である。
3.2 ATによる実世界オブジェクトの識別
本手法では、実世界のオブジェクトに赤外線タグを取り付け、それぞれに異なるIDをエンコードする。またATにはタグの位置検出を行うための可視光フィルタを取り付けたカメラとIDを得るための受光回路を、ATの全方位を観察できるように搭載する。
各方向のカメラから得られた画像に対しグレースケール化を行い、閾値以上の濃度値を持つ塊状物を検出する。塊状物の大きさおよび平均濃度値が一定値以上の値を持つとき、それを赤外線タグと判定する。検出を行ったカメラの方向とカメラの視野角、画像上の赤外線タグの座標から、ATから見たオブジェクトの方向を全方位にわたって判別することが可能である。また受光回路で得られたIDによって、画像処理によって検出した赤外線タグとIDの対応付けを行う。
4 オブジェクト情報の利用
赤外線IDを利用して関連するオブジェクトの情報を取得することができる。IDをキーとしてデータベースサーバに問い合わせると、IDに対応したオブジェクト情報XMLデータが得られる。これには対象オブジェクトの名称、付加説明、関連URLなどが記述されている。
4.1 可視光映像への付加情報の提示
可視光カメラが各方向に搭載されている。搭乗者用のコンソール画面にはこれらのカメラから得られる周囲の映像をリアルタイムで表示している。映像にタッチすることでその方向の映像が拡大表示される。また、赤外線タグによって実世界情報を取得すると、オブジェクトの名称が映像上にオーバーレイ表示される(図)。このように周囲の映像とオブジェクト情報を組み合わせることで、搭乗者に意識させることなく、どちらの方向に何があるかを提示することができる。
また映像上のオブジェクトにタッチすることで関連URLを表示したWebブラウザが表示され、対象物への補足説明や映像情報を閲覧することができる。
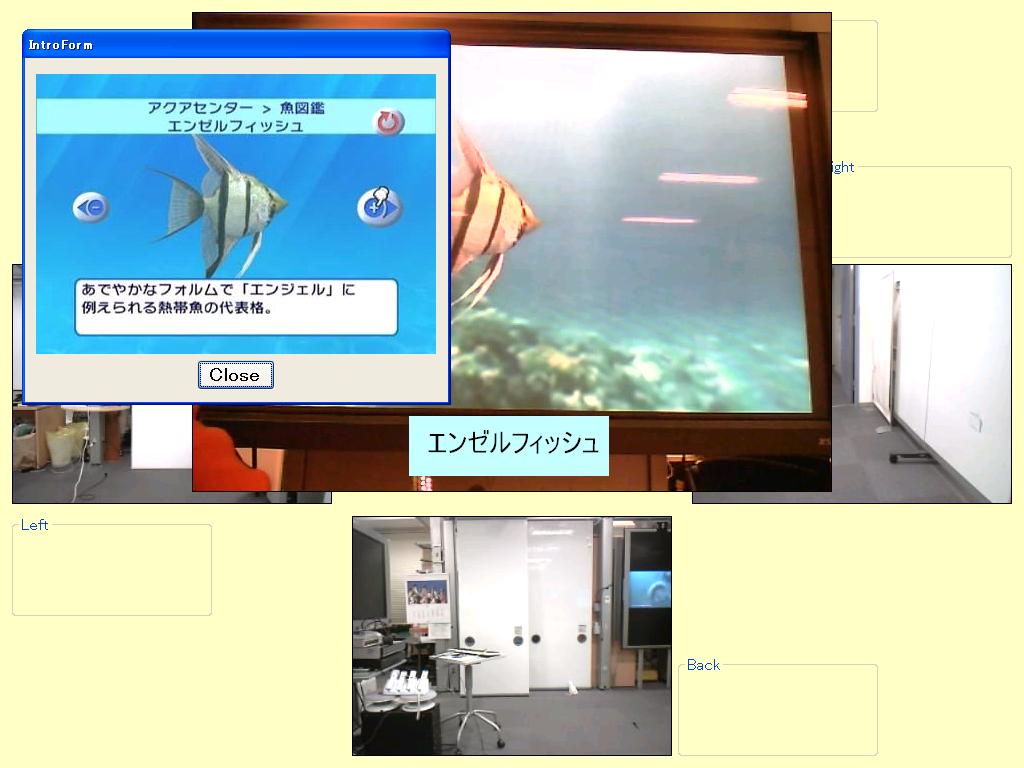
図2: 搭乗者に提示する映像情報
4.2 ATの正確な位置制御
ATが自動走行を行う際には、壁などに設置されたRFIDタグを読み取り、地図情報と照合しながら移動する。しかし、RFIDタグの読み取りには誤差が生じ、ATが停止したい位置と実際に停止した位置の間に数10cmの差が生じることがある。このような精度では、例えば美術館で展示物の正面に停止したい場合など、正確な制御を要する場面には不十分である。
そこで、赤外線タグをATの細かな制御に利用する。対象物の下部中央に赤外線タグを設置し、また前方に設置した赤外線用カメラをオブジェクト認識と同時に制御情報の取得に用いる。そのカメラで得られた画像の中心付近で対象の赤外線タグが観察できるようにATの位置を左右に移動させる。展示物との距離はレーザーレンジセンサで測定し、必要ならば前後移動もしくは回転移動を行う。また、オブジェクト情報XMLに位置調整を行うためのパラメータを記述し、それを利用してATの位置調整を行う方法も考えられる。
5 まとめと今後の課題
本論文では、実世界に存在する有意なオブジェクトIDをエンコードした赤外線LEDタグを貼り付け、ATに可視光フィルタ付きカメラと赤外線受光回路を搭載し、ATの全方位にわたって赤外線タグを検出する手法を提案した。また検出した赤外線LEDタグの位置と付加情報を利用したシステムについて提案した。
今後の課題としては、ATによる自動走行とオブジェクト情報を連携したシステムの構築が必要である。例えば搭乗者の履歴からその人の興味や嗜好を理解し、あらかじめ取得できるオブジェクト情報や同様の興味を持つ人の履歴を検索して最適な自動走行の経路を推薦することが考えられる。また、検出したオブジェクト情報から現在ATがいる位置の物理的・時間的な文脈と個人の嗜好の関連付けを行い、自動走行中に新たな経路の推薦を行うことが考えられる。