
個人用知的移動体による移動障害物回避に関する研究
はじめに
近年の情報通信ネットワーク環境・サービスの発達により、現在、我々は「いつでも、どこでも、誰でも」情報ネットワークに接続することができるユビキタスネットワーク社会の到来を迎えている。これまでの情報通信社会では、パソコンや携帯電話などの情報通信ネットワークを利用するための専用の情報端末が普及してきた。しかし最近では、そのような専用の情報端末以外にテレビゲーム機や携帯ゲーム機、さらには携帯音楽プレーヤーがインターネット接続機能を標準装備するようになるなど、情報端末としての一面をもつ機器が増えてきている。このようにユビキタスネットワーク社会ではこれまで情報端末ではなかったものが情報端末化するため、日常生活の中で我々と情報端末との結びつきがより密接になる。その結果、近い将来、我々は情報端末であることを意識することなくそれらを利用するようになると考えられる。
現在、我々の生活する実世界と情報の世界をつなぐ考え方として、移動中あるいは外出先などいつでも・どこでもコンピュータを利用するというモバイルコンピューティングが主流となっている。このことは今日のノートパソコンや携帯情報端末の高性能化・高機能化や、携帯電話やPHSによるデータ通信の高速化からも明らかである。また、モバイルコンピューティングの進化形として、小型化・軽量化した情報端末を常に身に付けて使うウェアラブルコンピューティングという考え方も広がり、その考えを基にした研究も数多く行われている。
しかし、モバイルコンピューティングやウェアラブルコンピューティングというコンセプトのもと、情報端末の高性能化・小型化が進んでも人間の生活する実世界と情報の世界を密接に結びつけることには限界があると考えられる。なぜなら、情報端末を持ち歩くだけでは、人間の物理的な行動に連動させて情報処理を行い、その結果を直接的に人間の行動に対して反映させることができないからである。例えば、携帯電話を用いて現在位置周辺のレストランを見つけることができても、実際にそのレストランまで行くのはユーザ自身であり、 携帯電話にはユーザをそのレストランまで連れて行くことができない。また、超小型の端末を身に付けていれば、街中を歩行中に近くを走る自動車など周辺の情報とやりとりし、歩行者とドライバーの双方に危険を回避するよう通知することはできる。しかし、実際に危険を回避するように行動するのは人間であって、小型の端末が人間を動かすのではない。それゆえ、人間が情報端末を持ち運ぶという発想をさらに発展させた考え方で、我々の日常生活一般を支援するシステムを開発することが望まれる。
そこで、筆者の所属する研究室では、人間の生活において最も基本的で重要な要素の一つである「移動」に着目し、移動体を用いて人間を物理的に移動させるという発想で、我々の生活する実世界と情報の世界をより密接に関連付ける方法を探っている。人間にとって「移動」は、自立的かつ快適に生活するために必要不可欠な行動であり、我々は生活の大部分において「移動」しなければならない。そのために人間はこれまで、自動車・バイク・車椅子など様々な移動体を数多く作り上げ、現在も幅広くそれらを利用している。このことから、人間の「移動」と情報端末との新たな関係を見出すために、日常的な移動体そのものを情報端末とする手法が考えられる。つまり、乗り物に情報処理・通信機能を持たせ、情報処理と人間の物理的な移動とを連動させる、搭乗型(マウンタブル)コンピューティングという考え方である。この搭乗型コンピューティングのコンセプトのもと、情報端末化した移動体の一つとして、我々はAT(Attentive Townvehicle)と呼ばれる個人用の知的移動体を設計・開発している。
ATは、搭乗者である人間や、AT自身を取り巻く環境に適応し、個体間通信によって協調的に動作することを目的とした移動体である。ATはそれ自体が情報端末であるがゆえに、搭乗者である人間は常に情報の世界にアクセスでき、また情報の世界からのフィードバックをすぐに反映することができる。また、ATに搭乗者の嗜好や特性を蓄積していくことで、搭乗者に適したスピードで走行したり、搭乗者が興味をもちそうな情報を提示したりするなど、搭乗する人間一人一人が利用しやすいようにATをカスタマイズすることもできる。つまり、ATは物理的文脈を考慮しつつ個別の人間に適応した情報処理を行うことで、その人の活動にとって最適な情報環境を形成することができる。
またATは、自動車やバイクなどと異なり、屋内と屋外の両方で利用されることを想定した、一人乗り用の小型の移動体である。そのため、ATを利用して移動する際の移動の粒度は自動車やバイクなどに比べてかなり細かくなければならない。ATの動きは、いつでも好きな方向に転換でき、どの方向にもすぐに動き出せるという、人間の動きにより近いことが望まれる。そこで、現在我々が開発中のATは、駆動系にオムニホイールと呼ばれる複合車輪を用いて全方位移動とその場回転を実現している。自動車やバイク、自転車では不可能であった左右への横スライド走行、移動体の中心を回転中心とするその場回転が可能になったことで、我々が「動きたい」と思う通りの動き、すなわち人間の直感に合った動きができるようになった。我々の考える搭乗型コンピューティングにおいては、このようなユーザの直感に合った移動だけでなく、ユーザの直感に合った操作・操縦も目指している。それゆえ、操縦には我々にとって比較的馴染み深く直感的操縦が可能なゲーム機のジョイスティックを、各種設定や情報へアクセスを行う際のATの操作にはタッチパネルを用いるなど、ATのユーザインタフェースを可能な限り簡単なものにしている。ATのシステム構成・操作方法については第2章で詳しく述べる。
これまでのATを用いた研究として、走行履歴を体験コンテンツとして蓄積し、その情報を共有・再利用するシステムや、赤外線タグを用いて実世界対象を認識し、その関連情報を提示するシステムなどが構築されてきた。 しかしこれらのシステムを利用する際、搭乗者はATの運転と取得情報の認識、あるいはその情報に対する操作を両方行わなければならない。地図上でのATの位置やAT周辺に何があるのかという情報、他のAT搭乗者からのメッセージなどATが取得した情報は、音声のみにとどまらず、テキスト、画像、さらには動画で搭乗者に伝えられる。そのため、搭乗者が運転と情報認識を同時に行うことは、運転の最中それらの情報に 気を取られて、身近に迫る障害物や人に気付かず、衝突する可能性があり非常に危険である。だからといって、運転するときは表示される情報を見ないで運転に集中し、情報を見たり、情報にアクセスしたりするときは運転を休止するというのは効率が悪い。このことは、携帯電話で通話しながら車を運転すると、運転者の注意力が散漫になり事故を引き起こしやすいことや、途中で道がわからなくなっても、走行中はカーナビを操作することができないため停止するまで行き方の情報が得られない、といった現在の移動体と情報端末との関係に生じる問題と同様である。この問題を解決するために、移動体が人間を乗せて自動走行し、その搭乗者の目的地まで安全に連れて行くという、自動トランスポーテーションシステムの研究が行われてきた。移動体が人間を自動で安全に目的地まで連れて行くことができれば、人間は移動中も地図を見たり他者と通信して会話したりなど、運転以外のことに集中することが可能になる。
移動体型情報端末ATの自動トランスポーテーションシステムは屋外と屋内の両方で実現することが望まれる。しかし、屋外自動トランスポーテーションと屋内自動トランスポーテーションでは、その実現法が大きく異なるため、単一のシステムとして扱うことは難しいであろう。例えば、屋外ではGPS (Global Positioning System)が利用可能であるのに対して、屋内では利用不可能であるという、測位方法の違いがある。また、移動の粒度が異なることに付随して、移動体の制限速度や測位精度の許容誤差の範囲などが屋外と屋内では異なる。それゆえ、自動トランスポーテーションシステムは屋外用と屋内用に分けて扱い、屋外自動トランスポーテーションによって目的の建物まで到達した後、建物の入口でシームレスに屋内自動トランスポーテーションに切替り、目的の場所まで行くという仕組みを理想としている。
移動体が自動で安全に目的地の場所に辿り着くためには、時々刻々と変化する移動体の周囲に存在する障害物を検出し、危険を回避しながら移動する必要がある。病院や博物館、ショッピングセンターなどの屋内での利用を想定した場合、たくさんの人が往来するため、人間が障害物となる可能性が十分にある。ATは自動走行を行う時に、車道と歩道のようにATと歩行者を分離することなく、協調的に動作することをコンセプトにしている。それゆえ、ATはその人間を回避しながら目的地に近付く必要がある。
これまでのATによる障害物の回避は、PSD(Position Sensitive Detector)センサを用いて、障害物を検出したら真横に避け、それを通り過ぎたら元の経路に戻るという手法が採用されてきた。
この手法の問題点は、障害物が移動する場合に柔軟に回避できないことである。PSDセンサは、センサから1m以内の近距離の障害物しか検出できない上に死角が多いため、壁の途中にある柱などの凹凸を上手く回避できない。また検出距離が短いため、ATの制動距離を考えると走行する時の速度が限定される。
人間を回避する際も、センサが検出可能位置にいる人しか回避することができず、ATの周囲に複数人存在する場合に対応できない。障害物の移動方向を考慮せずにATが回避するため、人の移動方向と同じ方向へとATが移動したり、ATが人を検知して避けようとしたらその方向に他の人がいたりする可能性がある。その結果、ATと障害物との衝突や、ATが冗長な回避動作を繰り返すという問題がある。また、歩行者の進路を横切り、進行を妨げるだけでなく、他者や物体が入り込むと不快や危険に感じる空間内にATが侵入する可能性があり、人に不快感や圧迫感を与えてしまう。人間に対しては、直前になってから衝突回避動作を行うのではなく、それ以前に十分離れた距離で回避行動を開始し、確実に衝突しないようにすることが望ましい。
本論文では、ATを用いて、安全かつ効率的な障害物回避を実現するための周囲環境の認識及び障害物回避の手法を提案する。
ATの周囲の環境認識では、広範囲で障害物との距離を測定可能なレーザレンジセンサを複数用いることで、全方位の障害物を検出する。また、リアルタイムに周囲の障害物地図を作成しながら、蓄積した過去のセンサデータから移動障害物を判別する。障害物回避では移動障害物に対して、移動速度ベクトルを算出することで進路を予測する。この予測に基づき、進行を妨げない回避経路を生成することで、回避動作の繰り返しの低減だけでなく、人に不安感や圧迫感を与えない障害物回避を実現する。
以下に本論文の構成を示す。第2章では個人用知的移動体のコンセプトや構成について述べる。第3章ではレーザレンジセンサによる移動体周辺の環境認識について述べる。第4章では環境認識に基づく障害物回避について述べ、提案手法の有効性を検証するための実験とその結果に関する考察について述べる。第5章では関連研究について述べる。最後の第6章でまとめと今後の課題を述べる。
個人用知的移動体AT
AT(Attentive Townvehicle)は、搭乗者である人間や移動体自身を取り巻く環境に適応し、周囲の環境や他の 移動体との通信によって協調的に動作することが可能な個人用の乗り物である。 本章では、ATのコンセプトおよび構成、機能について述べる。
ATのコンセプト
搭乗型コンピューティングはモバイルコンピューティングやウェアラブルコンピューティングというコンセプトを拡張して、 いつでもどこでも情報処理を支援するだけでなく、移動や運搬などの物理的行動も同時に支援しようというコンセプトである。 我々は新しい個人用の乗り物としてAT(Attentive Townvehicle)を開発し、それを取り巻く物理的・情報的環境に関する研究・開発を 行っている。ATは人間中心の状況認識機能をもつ知的な移動体である。人間はATに乗り込むことで、情報システムと一体化し、 情報環境と物理環境をリンクする。また、複数のATは協調的に動作することができ、安全に走行できるだけでなく、人間の コミュニティ活動や社会ネットワーク構築も支援することができる。
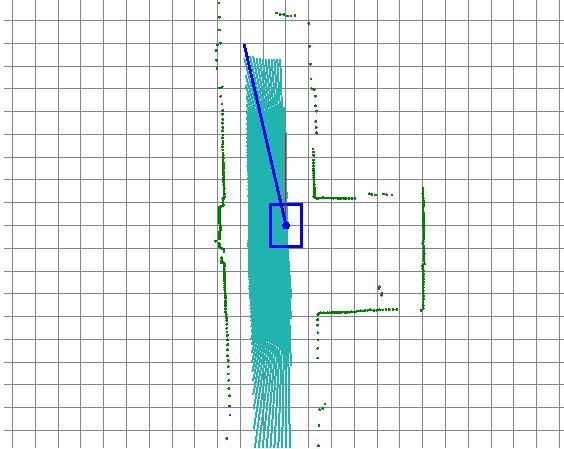
図1: ATに関わる研究分野
図に示すように、ATを用いた研究領域は多岐に渡っている。これは、人間と情報端末としての 移動体の双方に関わる問題が広い領域にまたがっていることに 起因していると考えられる。我々はATをより知的な移動体にするため、ATと「環境」「人間」「他の移動体」という各要素間にある3つ のインタラクションに「ATの個体としての自律性」を加えた4つの軸をもとに研究を進めている。図に示した、その4つの軸をこれまでに行われた研究と共に解説する。
-
ATと環境とのインタラクション
ここでの環境とは、物理的環境(実世界)と情報的環境(情報世界)の2つの意味を持つ。物理的環境とは、 人間は感覚や運動により、ATはセンサ類やモータにより認識あるいは作用することができる現実世界の対象や状態を指す。 一方、情報的環境とはATがアクセスできるコンテンツや情報サービスの集合を指す。これに関して行われた研究に、実世界対象物の認識手法や 場所に連動した情報コンテンツの利用などがある。
-
ATと人間とのインタラクション
移動体がユーザの特性を把握し、移動体を利用すればするほどユーザに適応していく個人適応という研究課題がある。また、状況に応じた操作インタフェースを提供することも考えられる。具体的には、より直感的な操縦インタフェースを追求したり、非搭乗時の遠隔操作を可能にしたりするのである。これまでには、非搭乗時に自動的に人間を追尾させる研究も行われている。
-
AT間(移動体間)のインタラクション
移動体間通信を用いることで、AT同士は協調動作をすることができる。それゆえ、接近中のAT同士が互いに通信して衝突回避を行う研究や先頭の有人のATを無人のATが追尾する連携協調動作の研究がこれまでに行われた。また、アドホックネットワークの仕組みを用いて周囲のATとコミュニケーションを行うことが可能になるため、ATを用いたコミュニケーション支援システムやAT搭乗時の体験を共有・再利用するシステムが構築された。
-
ATの個体としての自律性
人間の日常生活において基本的な要素である「移動」そのものを支援するために、感覚機能を強化し障害物回避を実現するといった、個体としての自律性を高める研究課題である。
以上のようにATは自身に搭載されたセンサ類や、AT間・AT-サーバ間の通信によって3種類のインタラクションとAT自身の自律性を実現している。また、これらのインタラクションを通して獲得した情報を利用して、人間や環境への適応を可能にしている。本研究の移動障害物回避は環境とのインタラクション及び個体としての自律性の領域に位置づけられる。
オムニムーバー
現在我々が開発中のATの特徴の一つは、全方位に移動ができることである。我々はそのような移動体を「オムニムーバー~(OmniMover)」と呼んでいる。オムニムーバーは、アメリカ製の個人用移動体セグウェイのようにその場回転をして任意の方位を向いてから走行するものでなく、静止状態からならばどの方位にもすぐに動けるものである。ただし、既に動いている状態で任意の方向に動くためには慣性を考慮しなければならない。また、乗っている人間への加速度の影響も考慮しなければならないため、動いている最中はすぐに動きたいと思う向きに動けるわけではない。
それでも、全方位に動くことが可能であるということは、これまでの乗り物とは違った動き方ができるということである。それは、例えば障害物や人などの避け方に現れてくる。これまでの乗り物は、止まっている状態から真横に動くことができないため、障害物や人間が乗り物の間近に接近してしまうと回避しきれずに衝突してしまう。
そこで我々の研究では、ロボットコンテストなどの競技用ロボットの分野で以前から導入されているオムニホイールという技術を採用した。オムニホイールの外観を図に示す。 図を見るとわかるように、オムニホイールは、車輪の回転方向と垂直の方向に回転する複数の小型の車輪を合成した複合車輪である。この車輪を付けた物体は横滑りによって横方向に移動することができる。
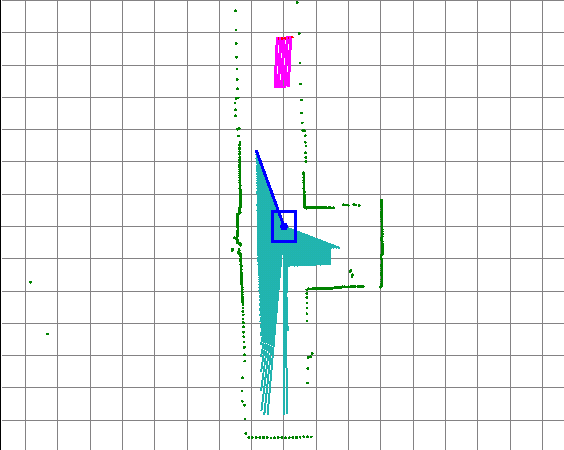
図2: オムニホイール
ただし、4個のモータ付きオムニホイールを使って全方位に動くことを可能にするため、モータのパワーを結構無駄に使わなければならない。そのためバッテリーの消費を考えるとあまり速いスピードを出すことができない。また、オムニホイールは弾力性に乏しいので、振動や衝撃の吸収力が非常に弱い。つまり、この構成が乗り物として妥当かどうかは、さらなる工夫次第なのである。
全方位移動、およびその場回転は、図のように非平行に配置された4個のオムニホイールを個別に制御することによって実現している。オムニホイールとベルトでつながれた高トルク(750w)のサーボモータは任意の速度制御が可能であり、またトルクを0にすることで空転させることができる。
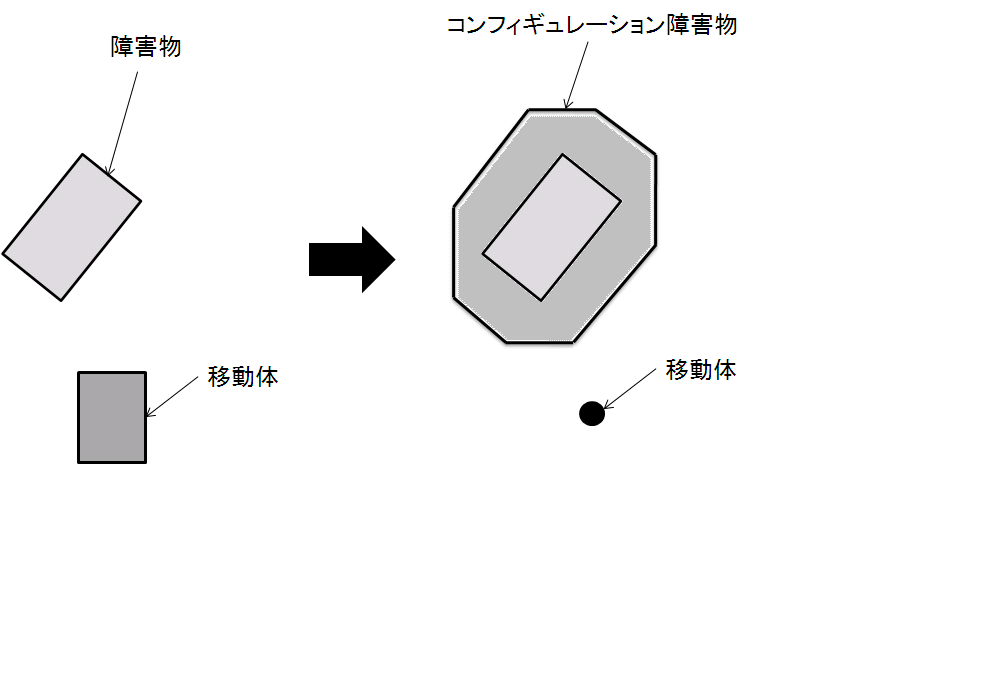
図3: 全方位移動のメカニズム
前後左右に動かすときは、4輪の回転速度を等速にして、それぞれの回転方向(正転か反転)を動く方向に合わせて調節する。例えば前方に動かす場合、図の(A)と(C)のオムニホイールを正転(図の正の向きに回転)させ、(B)と(D)のオムニホイールを反転(図の負の向きに回転)させる。車体から45度角の方向へ動かすときは、その方向を向いている2個の車輪を同じ方向に同じ速度で回転させ、それ以外の車輪は空転するようにする。それ以外の任意の方位へ移動するときは、4輪の回転速度と回転方向を細かく調整する。これによって、図のようなスムーズで柔軟な障害物回避移動が可能になる。なおその場回転は、図の(A)(B)(C)(D)全てのオムニホイールを正転させたり、反転させたりすることで実現できる。
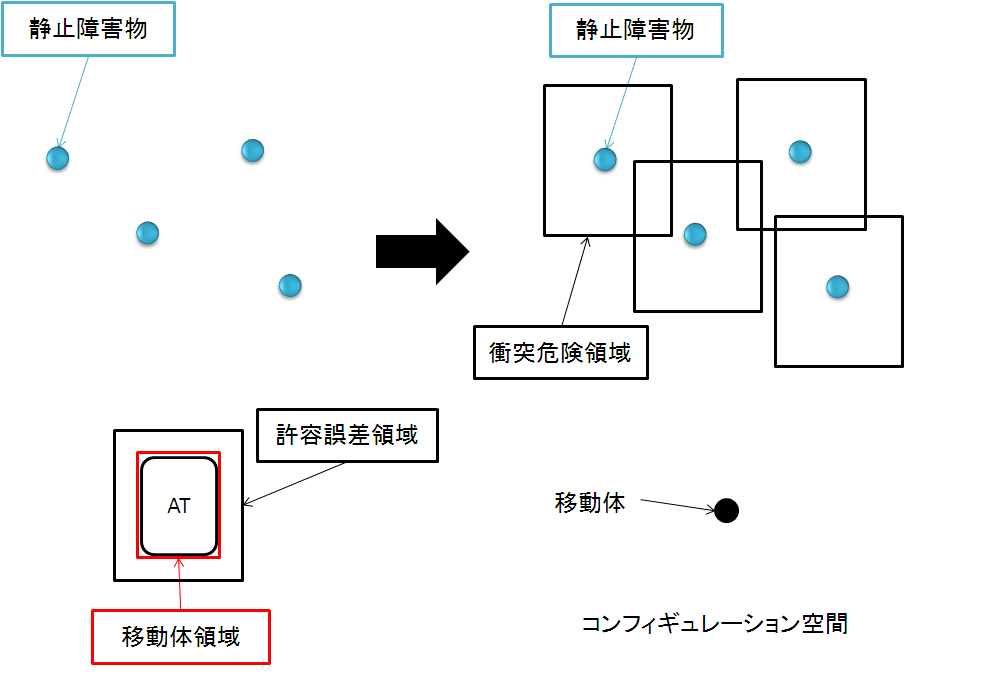
図4: 全方位移動による障害物回避
環境の情報取得
ATは環境の情報を取得しながら自動走行を行っている。自身の位置、周囲の障害物、対象のオブジェクトの詳細などの情報はすべて環境から取得しなければならない。我々は、環境からの情報取得を行うために以下のデバイスを用いた。
|
センサデバイス名 |
使用目的 |
|---|---|
|
レーザーレンジセンサ |
壁沿い走行、障害物回避など幅広く利用されている |
|
RFIDリーダ |
自身の位置と地図との照合、目的地の認識などに利用されている |
|
焦電型MPモーションセンサ |
人間を回避するときに、人間の存在を検知する |
|
カメラ |
ATの周囲の景色を撮影する。また、赤外線IDを認識しコンソール上の映像に結果を反映させる |
|
3軸センサ |
自身の向きを知るために利用されている |
レーザーレンジセンサは、以前に用いられたPSDセンサを置き換えるものである。PSDセンサからレーザーレンジセンサに変更することによる利点は以下のとおりである。
-
レーザーレンジセンサは、PSDセンサに比べて計測距離が長い。PSDセンサは1.5m程しか計測できなかったが、レーザーレンジセンサは、最大30mまで計測することができる。計測距離が延びることで、ATの走行速度を上げることができる。走行速度を上げると、低速度で走行している時よりも停止するまでの距離が延びるため、より遠くまで障害物があるかどうかを調べなければならない。
-
PSDセンサは赤外線の当たっている点までの距離を計測する仕組みなので、センサを向けている角度に対する距離情報しか取得できないため、周囲の状況を把握するのには不十分である。死角が多く、ATに移動障害物が近づいてきたとしても、センサの向いていない方向から接近してきた場合、ATはその障害物を検知することができず、最悪衝突してしまう恐れがある。しかし、レーザーレンジセンサは1台で複数の角度に対する距離を測定することができ、360°の状況を把握することができるため、センサと同じ高さならば死角がないのである。
-
2点目に関連して、ATは自動走行をする際、壁と一定距離をとる仕組みになっているため、PSDセンサを用いて凹凸のある壁に沿って走行する場合は、左右にぶれやすくなってしまう。しかし、レーザーレンジセンサならば、レンジを持たせて壁を見ることができるため、ある程度の凹凸は平均値を出すことによって吸収することができる。
システム構成
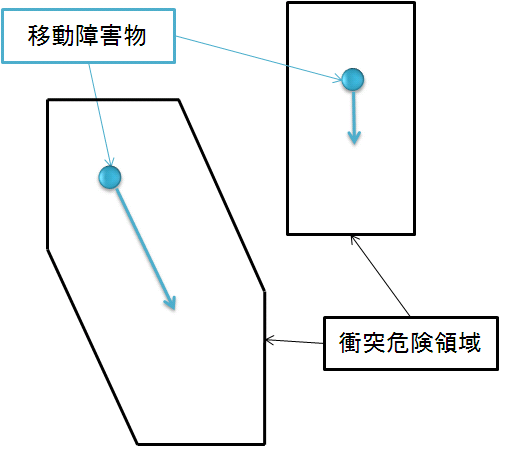
図5: 個人用知的移動体AT
現在我々の研究で用いているATの外観を図に示す。ATの車体にはアルミが使用され、オムニホイールと高トルクのサーボモータが使用されている。車体の幅は、扉やエレベータの入り口を通り抜けることが可能なサイズに抑えられている。人間は立った状態でATに搭乗し、小型のジョイスティックを用いてコントロールする。これについては2.5節で説明する。
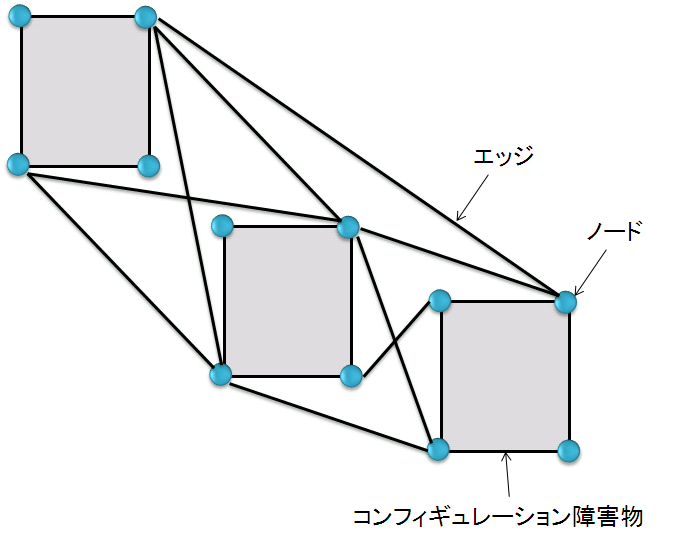
図6: システム構成
システム構成図を図に示す。モータのコントロールにはシーケンサが用いられ、ATに搭載されているPCからの進行方向や速度に関する命令から、各モータの速度を計算している。モータコントローラはその速度に合わせてモータのトルクを調節している。また、ATの制御には4台のPCが使用されている。それぞれの役割について以下で述べる。
-
モータ制御PC
ATの後方部、上の段に設置されたPCであり、モータに繋がるシーケンサなどの制御系デバイスが接続されている。このPCではC#によるMCServer(モータコントロールサーバ)が組み込まれており、ここでモータの制御を行っている。また、各PCからのモータ制御の命令はこのPCを介して行われる。他にも、RFIDタグを保持するRFIDサーバも組み込まれており、走行中に読んだタグを、前・右・左それぞれ10個まで保持することができる。読み取ったタグの情報は、一定時間が経過すると破棄される。これは、最後にタグを読み取ってから時間が経ってしまうと、そのタグは位置情報として役に立たないものになるためである。
-
レンジセンササーバPC
ATの後方部、下の段に設置されたPCであり、C++で実装されたレンジセンササーバが組み込まれている。レンジセンササーバは、ATの周囲の物体までの距離を常に測定しており、この値を利用して自動走行や、マニュアル走行時の衝突回避が行われている。
-
コンソール・カメラPC
搭乗者の手元に設置されたPCであり、タッチパネルが備えられている。このPCのディスプレイにWebブラウザ上に実装された操作用コンソールが表示され、搭乗者はこの画面から目的地を設定することができる。また、このPCにはUSBカメラが接続されており、操作用コンソールと共にATの周囲の映像を表示できるようになっている。
-
Javaで実装された地図プログラム、自動走行のタスクを実行するプログラムはこのPCで実行されている。他にもこのPCにはJavaで実装されたMCClient(モータコントロールクライアント)が組み込まれており、MCServerに対する命令は全てここを経由し、ソケット通信用に数値をバイト列に変換してからMCServerに送られる。
地図・自動走行PC
これらのPCは互いに無線によって接続されており、モータ制御PCとシーケンサは有線によって接続されている。
ATに搭載するPCの他にもPCは使用されている。
-
モーションセンササーバPC
焦電センサが接続されたPC。C#で実装されたモーションセンササーバが組み込まれている。モーションセンササーバは、人間との接触・衝突回避を行う際にATが焦電センサの前を通った人間の情報を問い合わせるために用いられる。この手法については4章にて詳細に述べる。モーションセンササーバは交差点ごとに置かれることを想定しており、一つのモーションセンササーバには最大4組8個の焦電センサが接続される。
0..1 操縦インタフェース
ATを操縦するときは、手元のコントローラのアナログスティックを倒したり、ボタンを押したりする。将来的には、AT利用者は全員自分専用のコントローラを所持することを想定している。これは、所有者の操縦履歴や嗜好を記録することにより、目的地や走行速度をカスタマイズするためである。コントローラとコンソールの詳細は図のとおりである。
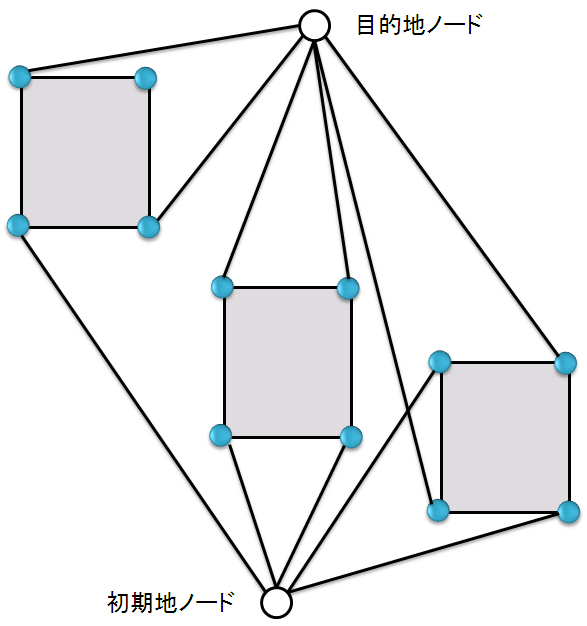
図7: コンソール画面とコントローラ
-
コントローラ
ATには2種類のコントローラが備え付けられている。1つ目は、マニュアル走行を行うための、アナログスティックのついた有線のコントローラである。アナログスティックを倒す向き、角度によってATのスピード、方向を決めることができる。また、人差し指に当たるボタンを押しながらアナログスティックを倒すと、その場回転をすることができる。このコントローラはモータ制御PCとUSBケーブルで接続されている。このコントローラは、ATに装着したまま使うことも、手に取って使うこともできる。
2つ目は、ATを外から操作するための、十字キーのついた無線のコントローラである。このリモコンは、ATを降りてから操作するために備え付けられている。ATとはbluetoothによって接続されており、ATとは物理的に接続されていないため、離れたところからも操作することができるようになっている。十字キーによって 8 方向に移動させることができ、'+', '-' ボタンによって右回転、左回転をさせることができる。
-
コンソール
コンソール・カメラPCのディスプレイに表示されている、ATを操作するためのインタフェース。コンソールは2種類存在し、一つ目は、目的地の設定、出発のタイミングを決定するための物で、二つ目は、ATの四方に取り付けられているカメラのリアルタイムの映像を表示している物である。上下左右のサムネイルは、ATの前後左右のカメラの映像に対応しており、サムネイルをタップすることによって、中心の大きな画面にそのサムネイルの映像を表示することができる。
0..2 ネットワークに関する機能
ここでは、ATの特徴の一つであるネットワークの基本システムについて述べる。ATにおけるネットワーク構成図を図にATにおけるネットワーク構成図を示す。
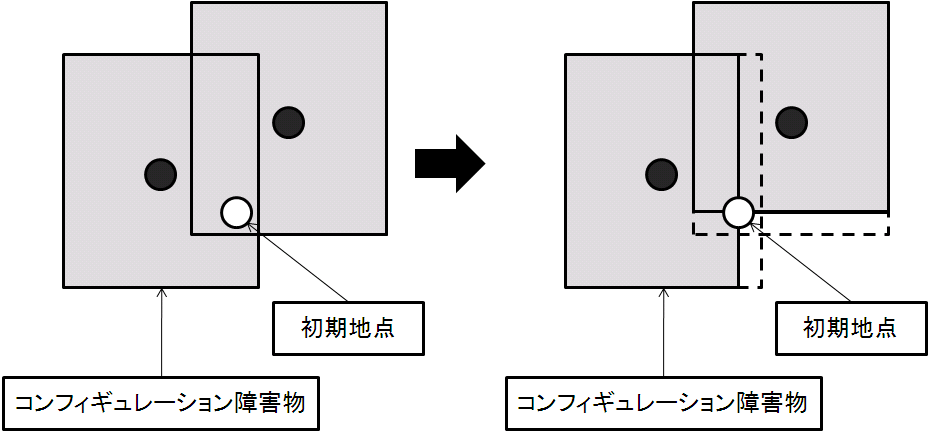
図8: ATにおけるネットワーク構成図
ATにおけるネットワークでは、グローバルネットワークを想定しており情報配信を行うサーバの存在が前提となっている。このサーバは、ある特定の地域を統括するような形での存在を想定しており、AT間通信の基盤を提供するとともに、サーバクライアント型のアプリケーションを提供する。統括サーバ以外には、例えば美術館や病院のような施設単位で、情報を配信するサーバが複数存在している。
ATにログインすると、統括サーバとのコネクションが確立され、情報配信を受けることができるようになる。統括サーバは、コネクションを確立しているATや、施設サーバの情報を収集し、配信するATの位置情報を考慮したうえでリストを作成し、配信する。この仕組みにより、近くにいるATの情報や施設の情報を容易に取得することが可能である。もちろん、他のATに対してメッセージを送信したり、複数のATに対して情報をブロードキャストすることもできるようになっている。
また、ATは個体間通信によってAT同士や搭乗者同士の情報交換を行うことができる。例えば、AT同士の連携動作に関する制御情報や搭乗者間におけるメッセージのやりとりなどである。個体間通信では、目的や通信対象との距離に応じて、サーバを介した無線LAN通信、 無線アドホック通信、赤外線LEDと受光回路による赤外線通信が自動的に切り替わり、状況に応じて使い分けられる。遠隔にあるATと情報交換を行う場合は、サーバを介した通信が適している。それに対して、AT同士の衝突回避などの即時性を求められる場面では、暗黙のうちにAT間のコネクションに切り替わることで対応する。
個人用知的移動体による自動走行
本研究の背景に、ATを用いて搭乗者である人間を目的地まで自動的に移動させるという、屋内自動トランスポーテーションがある。このシステムは、搭乗者がAT上で目的地を設定するとその目的地まで安全に自動走行し、その走行途中において搭乗者の状況や要求に応じた施設内の様々な場所や対象物に関する情報、あるいは目的地に関する詳細情報を搭乗者に対して提示するものである。またこのシステムは、美術館や博物館、さらには総合病院や空港のような大規模屋内施設での利用を想定している。
屋内自動トランスポーテーションのメカニズムを述べるにあたり、まず基本となるのがレーザレンジセンサを用いたATの壁沿い自動走行 である。本研究での自動トランスポーテーションは屋内での利用を対象としている。そのため、ATに装備された障害物までの距離を測定するレーザレンジセンサで常に壁を検出して、壁からの距離を一定に維持しながら走行するようになっている。これは、壁に沿って進むことで地図との 対応を取りやすくするためであり、屋内では精度が高い測位ができないという問題を解決する。さらに、壁に沿って走行するだけでは地図上での位置が把握できないため、壁に位置を知るためのランドマークとして RFID~(Radio Frequency Identification)タグを設置した。このRFIDタグを読み取りながら走行することで、ATは自身の の位置を知ることができる。
まず、搭乗者はATに搭乗し、コンソール画面を用いて目的地を設定する。目的地の設定は、直接指定しても良いし、どういったところに行きたいかを検索にかけて、その結果を目的地としても良い。目的地を設定し終わると、今度はATが自身の位置を把握する段階に入る。ATはレーザーレンジセンサを用いて、壁までの距離が最も短い角度を指定して近くの壁に接近する動作を実行する。ATが壁に接近したら、RFIDタグが見つかるまで徐行する。タグを見つけたら地図に問い合わせ、そのタグの地図上の位置から自身がいる場所を把握する。ここまでで現在地と目的地が決定したことになる。
現在地と目的地が決定すると、次に最短経路を計算する段階に入る。各建物にはその建物内の地図と、タグの位置、タグ間の距離を保持するデータベースを持つサーバが存在する。下図を例にとる。
現在位置を'A'、目的地を'I'とする。そして、データベースに基づいてその二点をつなぐ経路を計算する。経路とは、目的地まで走行する途中で通過すべきRFIDタグのIDを通過すべき順に並べたものである。これを可能な限り距離を短く、そして壁沿いを走行するように決定する。
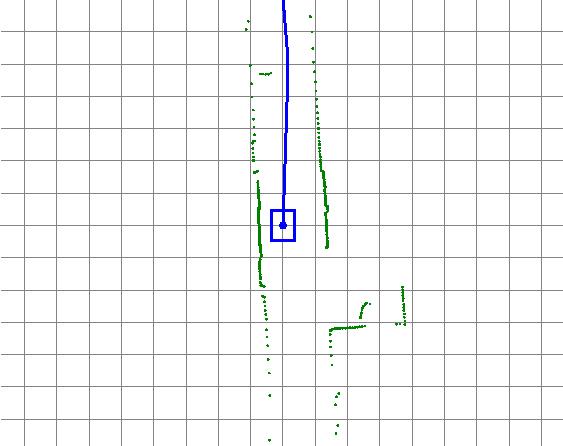
図9: 屋内地図
経路が決定したら、動作のプランを決定する。動作のプランとは以下に挙げる6つの各タグ間の基本動作を組み合わせたものである。
-
壁沿い直進
-
交差点の右左折
-
突き当りの右左折
-
交差点の直進
-
沿う壁の変更
-
その場回転
隣接するタグ間の基本動作は地図情報から算出可能で、これらと経路を組み合わせることにより自動生成される。上記5つの基本動作にはそれぞれ進行方向があり、それらをつなぐための動作として6番目の「その場回転」動作を含む。ゆえに、右左折時あるいはタグの属性や開始位置における向きよって、「その場回転」動作をプランの適切な位置に加えるプランニングを行う。
移動プランが決定すると、ATは移動を開始する。
目的地までは先に述べた壁沿い走行や交差点の右左折・直進、突き当りでの右左折などの動作を行いながら移動する。RFIDタグを用いて適宜自身の位置を把握し、コースから外れていないかの確認も行っている。目的地に到着すると、到着したことを搭乗者に伝え、ATの自動走行を終了する。
レーザレンジセンサによる移動体周辺の環境認識
人間が生活する非整備環境において、移動体が自動走行を行なうためには、自己位置推定問題、環境地図生成問題、ナビゲーション問題を解決する必要があり、近年、多様な手法が提案されてきた。
環境地図とは、移動体が走行する空間に存在する物体の位置や形状、移動体の移動可能な領域な領域などを表した図である。例えば、レーザレンジセンサから取得した距離情報をセンサを原点とする2次元の相対座標系にプロットしたものを障害物の相対位置として表したものがある。また、カメラやレーザレンジセンサを複数用いることで、3次元の地図を作成する研究もある。相対座標系の環境地図のほかに、すでに作成された建物の形状やランドマークの位置を絶対座標系で表した地図がある。
これらの多くは、移動体の行動する環境が初期状態から変化しない静的環境を想定したものである。しかし一般には、人間のようにその位置が時々刻々変化する動的要素や、椅子や机、開閉されるドアのように短期的には動かないが、長期的に見るとその位置が変化する可能性のある準動的要素が含まれる。それらは移動体にセンサノイズとして大きな影響を及ぼし、自己位置推定、環境地図生成、ナビゲーションを正しく行うことを困難にする問題がある。
本研究では、実環境における動的要素である人間などの未知障害物の存在する空間内で自動走行し、安全かつ効率的に目的地まで到達することを目標としている。移動体の自動走行を実現するにあたり、移動体が正確な自己位置と、正確な走行環境の情報を予め持つと仮定し、障害物と干渉しない経路を計算した後でその経路を追従するように移動体をコントロールするモデルベーストなアプローチがあるが、正確な自己位置と環境地図を取得することが困難な状況では適用が難しく、また、実環境の動的な変化に対応することが困難である。これまで、前章で述べた個人用知的移動体ATを用いて、ユーザーの指定する目的地に自動的に移動する仕組みが研究されてきた。この仕組みは事前に作成された地図を用いて移動経路を決定しているため、モデルベーストなアプローチである。
それに対し、移動体の目標位置が正確にわかっていて、走行環境が未知であり、移動体が環境を認識しながら移動をするタスクを考えるセンサベーストなアプローチがある。このアプローチでは、正確な環境地図を予め取得する必要がなく、移動をする直前に環境を認識するため、環境変化に対応することが可能であるという特性を持っている。
一方、モデルベーストなアプローチに向けて、ロボットの正確な自己位置推定と環境地図作成のための研究が多く存在していたが、その中で、複数センサの情報を用いて、自己位置推定と環境地図作成を同期的に行う、Simultaneous Localization and Map Building(以下、SLAM)がDissanayakeらによって提案され、その有用性が報告された。そしてこのSLAMと同期して時間依存な経路計画を行う、つまり、未知環境において移動を開始し、移動直前に環境認識をして、得られただけの情報から最適な経路を計画するアプローチが竹澤らによって提案されている。未知空間から獲得した空間情報から即座に経路計画を求める研究は、あまり多くなされていない。また、これらの研究では移動障害物の進路を予測した経路計画を行っていない。そこで本研究では、未知環境において、環境認識時に静止障害物と移動障害物を判別し、移動障害物の進路を考慮した経路計画を行う手法を提案する。
従来の環境認識の手法としては、一般的にレーザレンジセンサ、カメラ、またはその両者を複合する手法が広く用いられている。レーザレンジセンサは2次元スキャンであるが、高精度な距離計測が実時間で可能である。一方、カメラは、ステレオ視により空間分解能の高い3次元的な距離計測が可能な上、さらに画像テクスチャを得ることができるという利点がある。しかし、画像処理を行う必要があり、測定精度・分解能・実時間性等の点でレーザレンジセンサに劣る場合もある。本研究では、環境を認識しながら実時間で回避動作を開始する必要があるため、高速かつ安定した距離情報を取得可能なレーザレンジセンサを用いた。
障害物の距離情報の取得と統合
レーザレンジセンサは物体にレーザー光をあて、その反射光を受光して物体までの距離を算出する。これを一定の角度サンプル間隔の角度毎に距離を測定することで、床面から一定の高さの平面上に扇状の距離情報を最大30m、角度240°の範囲で得ることができる。

図10: レーザレンジセンサの検出範囲
このレーザレンジセンサをATの前後左右に1つずつ計4つ装備した。レーザレンジセンサはそれぞれ図のように180度の範囲の障害物を検出するように設定し、死角のないように設置している。床面からの高さが約50cmで床面に平行な平面上をスキャンすることになる。それぞれのレーザレンジセンサのデータはノイズ除去のために、5回スキャンしたデータの最大値、最小値を除いて平均を取っている。
それぞれのレーザレンジセンサの距離情報はセンサを中心とした極座標であるため、これらを環境地図として扱うためには、1つに統合する必要がある。本研究では、図のようにーザレンジセンサの設置位置を考慮し、ATの中心を原点とした極座標に変換した。統合後の角度はATの前方に対し、時計周りを正とし前方の角度を0度とする。角度分解能は1度とし、360点の距離情報として扱う。統合した際に、角度毎で距離情報が重複する場合がある。その場合は、それらの距離の最小値を採用した。

図11: レーザレンジセンサの統合
移動障害物と静止障害物の判別
移動障害物は常に同じ場所に存在するわけではないので、距離情報を統合して作成された環境地図を時間方向に比較して差分処理を行うことで、静止障害物と移動障害物を判別する。しかし、ATは移動しているため、環境地図は異なる位置で作成されたものとなる。異なる位置で作成された環境地図の統合には、各環境地図の位置関係を推定する必要があり、環境地図作成時の移動体の自己位置情報が重要となる。
移動体の自己位置推定法として、車輪の回転数から走行距離や回転角度を推定するデッドレコニングがよく使用されるが、これのみでは車輪のスリップなどで誤差が蓄積し正しい自己位置推定はできない。また、ATはオムニホイールによる全方位移動を行う際に、ホイールに取り付けられたローラーが回転する。このため、移動距離が同じでも、進行方向によって、オムニホイールの回転数が異なる。ゆえに、ATでのデッドレコニングは困難である。よって本研究では、移動体の自己位置推定に各位置での環境地図の重なった部分を用いて位置合わせを行うICP(Iterative Closest Point)アルゴリズムを使用する。ICPアルゴリズムの収束結果を自己位置推定結果として用い、複数位置で計測したデータを統合する。
ICPアルゴリズムは、複数の距離データ間で重複して計測された部分を利用して、繰返し計算により誤差関数を最小化する解を求める方法である。具体的には、図のように2つの点群M、Sがあるとき、点群S中の各点について、点群M中で最も近い点を対応点とする。そして、各対応点間の距離の2乗和が最小となる移動パラメータ(R, t)を求める。ここで、Rは回転行列で、tは並進移動ベクトルである。実際にマッチングを行うとき使用する対応点群は,対応点間が一定の距離以下のものを使用する。

図12: ICPアルゴリズム
そして、求めた移動パラメータ(R, t)を用いて,すべての点群を修正する。この移動パラメータが環境地図の位置関係であり、環境地図の作成間隔でATが移動したベクトル及び回転角度となる。
環境地図からの移動障害物の判別方法について述べる。移動障害物は常に同じ場所に存在するわけではないので、統合された環境地図を見ると、移動前後の計測データにおいて、点群が重ならない。そこで、移動前の計測データにおいて、点群の重ならない部分を探索する。図のように時刻(t-1)における計測データと時刻(t)における計測データを比較し差分処理を行う。この点群に移動障害物が存在する可能性がある。しかし、この方法では移動障害物は検出できるが、レーザレンジセンサの検出範囲外になった障害物や他の障害物に遮られた障害物など、一部の静止障害物も移動障害物として検出してしまう。
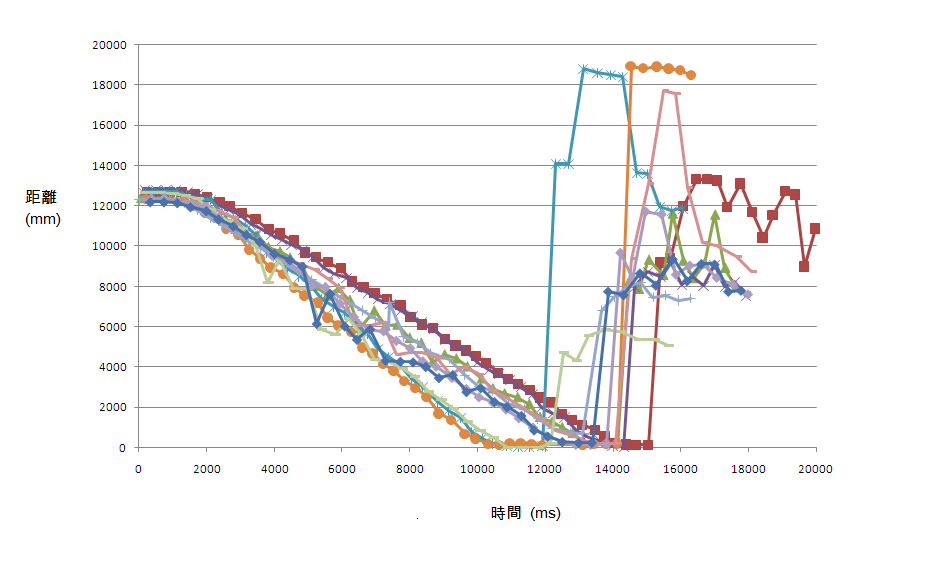
図13: 環境地図の統合と移動障害物の誤検出
そこで,図のように時刻(t)から(t-n)までの合計でn個の計測データを用いて差分処理を行い、移動前における移動障害物を推定する。時刻(t-1)で重ならない点群がそれ以前の(t-n)までの計測データで重ならなければ、移動障害物と判定する。次に、移動後の計測データにおいて、点群の重ならない部分を探索する。この点群を近傍に存在する移動前の移動障害物に対応付ける。対応する移動障害物が近傍に存在しなければ静止障害物となる。これにより移動体は静止障害物と移動障害物を正確に判別可能となる。
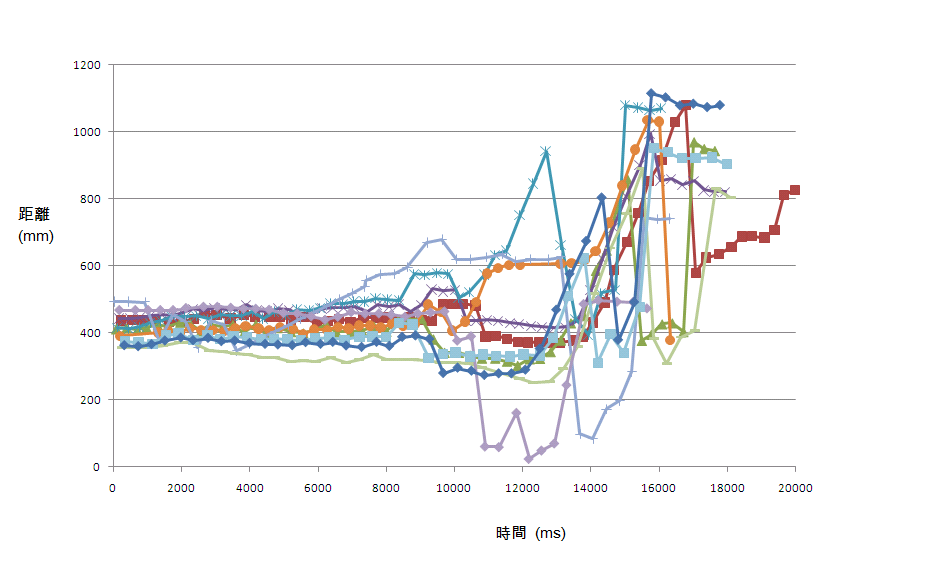
図14: 移動障害物の検出
移動障害物の移動ベクトル
移動障害物の移動先を予測することで、移動方向と同じ方向へとATが移動したり、移動障害物の進路を横切り、進行の妨げになるといった移動障害物への干渉を回避することができる。本研究では、移動障害物の移動ベクトルを計算し、等速直線運動として、移動先を予測する。前節で、移動前後の計測データにおいて、点群の重ならない部分から最も近い点群を対応する移動障害物として識別した。この対応点間の位置関係と計測時間差から移動ベクトルを算出する。しかし、レーザレンジセンサの測定誤差や障害物の形状・向きによる検出点のずれが存在するため、対応点が障害物の同じ部分を検出しているとは限らない。そのため、同じ障害物であっても移動ベクトルが定まらないという問題がある。これを補正するため、近傍に存在する点群を1つの移動障害物だと仮定し、点群の重心の位置関係から移動ベクトルを算出した。
しかし、2点の重心の位置関係だけでは、移動ベクトルの誤差が大きい。そこで、過去の対応する重心の移動ベクトルを平均化し、最終的に移動ベクトルとした。図に移動ベクトル算出の流れを示す
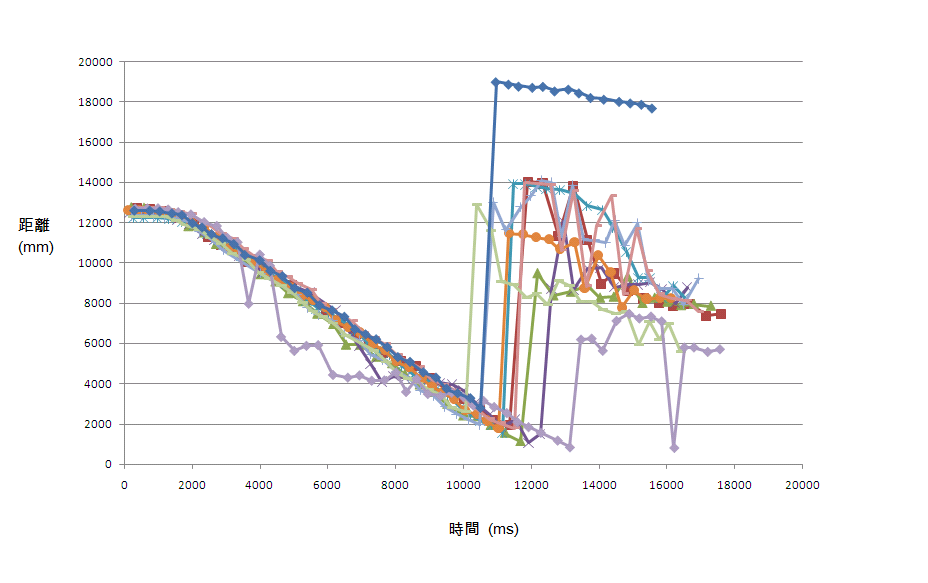
図15: 移動ベクトル
本章では移動体周辺の環境を認識するための具体的な手法について述べた。本研究では、環境を認識するとは、障害物の相対位置と障害物の移動ベクトルを検出することとした。障害物の相対位置は、レーザレンジセンサで取得した距離情報を、移動体を原点とした極座標にプロットした環境地図で表している。移動ベクトルは、環境地図を時間方向に比較して差分処理を行うことで、障害物の移動方向と速度を表した線を環境地図に追加した。作成した環境地図を図に示す。
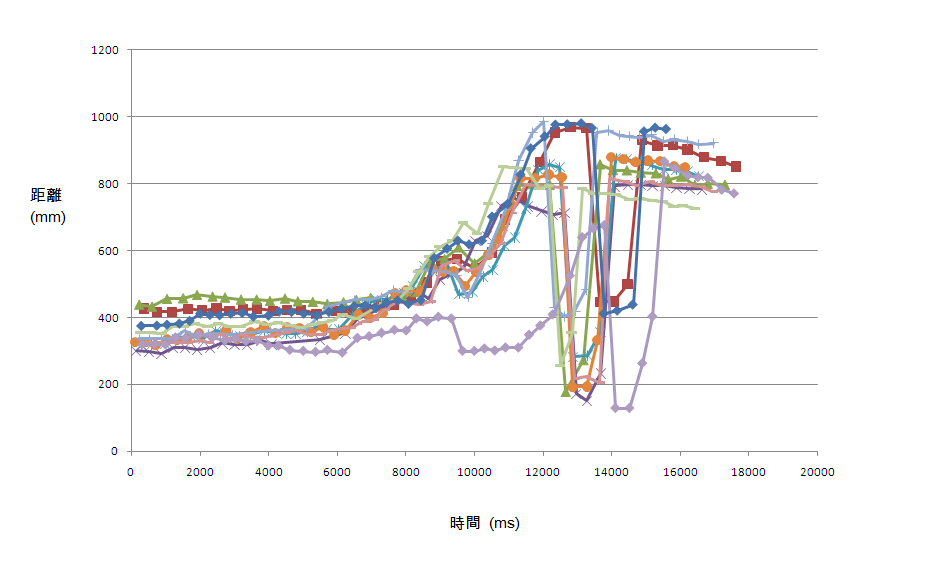
図16: 環境地図
次章では、この作成した環境地図を基に障害物を回避する経路を生成する手法を詳細に述べる。
環境認識に基づく障害物回避
障害物回避手法
3章で述べたように、環境地図を作成した後には、障害物を回避するために移動体をどのように移動させるかというナビゲーションの問題がある。ナビゲーションの広義的な分類としては、モデルベーストナビゲーションとセンサベーストナビゲーションがある。
モデルベーストナビゲーションは、移動する環境の情報(環境地図)はあらかじめ与えられており、その環境地図を基に初期位置から目標位置まで移動させるナビゲーションシステムである。モデルベーストナビゲーションの欠点として、移動体であるために生じる自己位置誤差・姿勢誤差が致命的なファクターとして働く事と、環境地図に何らかの誤りが含まれると移動体は障害物に衝突する可能性が生じる。また、障害物が移動物体である場合、その障害物を避ける事が困難である事などが挙げられる。
センサベーストナビゲーションは一般的に移動体には行動範囲内の情報が一切(あるいは部分的にしか)与えられておらず、それを外界センサ(ビジョンセンサや超音波センサなど)を用いて移動を繰り返しながら局所的に獲得し、目的地まで移動させるナビゲーションシステムである。モデルベーストナビゲーションとは異なり、自己位置・姿勢誤差が多少発生しても障害物を回避して移動する事が可能であるが、障害物回避を試行錯誤的に行う事が必然であり、目的地に到達した時の移動経路が必ずしも最適経路であるとは限らず、システムや障害物の配置によってはデッドロックに陥る可能性もある。
従来のATを用いた自動走行では、基本的に環境地図は建物に入った時に取得し、それをもとに初期位置から目的地までの移動経路を決定している。自己位置誤差の補正のためにRFIDタグを用いている。また壁沿い走行をすることで位置誤差と姿勢誤差を補正している。障害物回避は、環境地図にない進行方向の障害物を検出したとき、障害物に沿って移動する仕組みとなっている。つまり、大域的にはモデルベーストナビゲーションで自動走行を行い、局所的にセンサべーストナビゲーションに切り替えて障害物回避を行っている。
従来の仕組みでは、効率的な障害物回避であるとは言えない。また、障害物に接近するため、移動障害物だった場合、衝突する可能性が高い。そこで、障害物を効率的に回避するために、新たな回避アルゴリズムに変更した。このアルゴリズムでは、逐次取得した環境地図を基に目的地方向への走行可能距離が長い方向へ移動する。
このアルゴリズムにより静止障害物を回避する場合の回避方向を図に示す。

図17: 走行可能領域に基づく静止障害物回避
しかし、このアルゴリズムでは選択された移動方向に移動障害物が進行してくる可能性があり、進行の妨げや衝突が起こる可能性がある。そこで、移動障害物に対しては、3章で述べた移動ベクトルにより、移動障害物の移動方向に対して衝突危険領域を設定する。さらに、移動体の移動速度を一定とし、各回避方向に対する移動ベクトルを用いて、移動体と回避する移動障害物の相対ベクトルを算出する。この相対ベクトルにより、衝突可能性を計算する。衝突すると判定された場合は、その方向の走行可能距離を0とする。この仕組みにより、静止障害物及び移動障害物に対して、効率的な回避が実現できた。衝突危険領域および相対ベクトルによる衝突判定は次節で詳細に述べる。図に移動障害物を回避する場合の回避方向を示す。

図18: 走行可能領域に基づく移動障害物回避
しかし、センサベーストナビゲーションで問題として挙げられるデッドロック現象に陥ることや、目的地に到達した時の移動経路が必ずしも最適経路にならないことがある。
そこで、本研究ではセンサベーストナビゲーションとモデルベーストナビゲーションを複合した手法により、デッドロック現象を回避し、回避経路を限りなく最適解に近い形で得る事で、より効率的な回避を実現する。つまり、逐次取得した環境地図を基に、即座に経路を計画する。環境地図に対して効率的な経路を構築するために以下の手順で経路の計画を行う。
回避経路の生成
移動体にとって、最適な経路は効率性、安全性、快適性などの観点から作成できる。効率性を重視したい場合は、目的地まで一番早く到達するような最短経路や経路は長くても、直線が多く速度が出せることで到達時間が短い経路を選択する。最短であっても経路幅が狭い、曲がる部分が多いような複雑な経路では速度を出せないため到達時間が長くなり効率が悪い。安全性を重視したい場合は、走行経路の幅が広い・移動障害物との衝突可能性が少ない経路を選択する。快適性を重視したい場合は、搭乗者への負担を少なくするような、揺れや速度の変化が少ない経路を選択する。本研究では最短経路を最適経路と定めている。まず最短の経路を高速に選択するために、どのようなデータ構造で地図を表現するかを説明する。
一般に最短経路は障害物と接するので、位置誤差があると移動体は障害物と衝突する可能性が高い。これに対しては、障害物に対して移動体の誤差を考慮した安全領域を設定する。誤差を小さくするためにセンサの取得・経路計画の間隔を短くするなどが考えられる。
そこで障害物と移動体との接触を避けるために、図のようなコンフィギュレーション空間を用いる。実環境内において移動体の経路計画を行う場合では、位置だけではなく姿勢に関しても考慮する必要がある。コンフィギュレーション空間とは、障害物に囲まれたある環境内において、その移動体が配置可能な範囲を各姿勢について集めたものである。特に、移動体の重心と回転中心が異なる場合では、姿勢について0から360度までの空間の構築が必要となる。この空間を利用することによって、移動体を点として見なして経路の計画をすることができる。これらコンフィギュレーション空間内での障害物表現をコンフィギュレーション障害物と呼ぶ。

図19: コンフィギュレーション空間
本研究では移動体は全方向に移動可能でかつ長方形で表現している。まず、全方向に移動できることから移動体の向きは無視できる。次に移動体は長方形で表現でき、障害物回避に関しては回転をしないということから、コンフィギュレーション障害物は長方形の形状をとる。しかしコンフィギュレーション障害物の拡張幅が移動体の大きさだけでは、移動の際に発生する誤差に対応しきれず、障害物と衝突する危険性がある。そこで、移動体の性能により決定する幅の許容誤差領域をコンフィギュレーション障害物に追加することで、誤差が発生した場合でも障害物と接触する危険性を軽減することが出来る。本研究ではこの許容誤差領域と移動体領域を合わせて衝突危険領域とし、図のようにコンフィグレーション障害物として扱う。許容誤差領域の幅が小さいと障害物に近い位置を通るため移動距離は短くなるが、障害物と接触する危険性が高くなる場合がある。一方、許容誤差が大きいと障害物との接触の危険性が減るためより確実に目的地まで到達できるが、障害物を大きく迂回することになるので移動距離が犠牲になる場合がある。このように許容誤差領域の幅は出来るだけ移動体の性能と環境にあった適正な値を求める必要性がある。

図20: 衝突危険領域
さらに、移動障害物に対しては、図に示すように移動ベクトル方向に長方形領域をずらした形状の衝突危険領域を設定する。これにより移動障害物の進行方向の領域へ進入する経路はなくなる。この空間に対して、グラフ構造のパス探索手法に基づいて経路計算を行う。

図21: 移動障害物の衝突危険領域
経路を高速に選択するためにグラフ構造で地図を表現する。グラフとは、ノードがエッジで結ばれたデータ構造で、ノードは移動体の位置、エッジは二つの位置間の移動を意味する。グラフでは、距離、時間など、最適にしたいものをコストとしてエッジに与える。エッジが入るノードはそれが出たノードを記憶し、いつでも来たところへ戻れるようにする。また、両方向に移動できるなら無向エッジを用い、一方向にしか移動できないなら有向エッジを用いる。
グラフは、最短の経路で目的地に到達することを重視した可視グラフ法を採用する。可視グラフ法は、障害物の頂点をノード、2頂点を結ぶ経路をエッジで表す。ただしエッジは頂点同士を結んだ線分が障害物に遮られない、障害物の頂点どうしが見えているものを選択する。エッジには2端点間のユークリッド距離がコストとして付与される。これより、初期地ノードから目的地ノードまでの最短経路が常に選択される。この手法を前項で述べたコンフィグレーション空間に対して用い、経路を生成する。頂点は、コンフィグレーション障害物の頂点とする。本手法では、静止障害物のみのグラフ生成と移動障害物を考慮したグラフ生成の2段階で行う。静止障害物の経路は無向エッジ、移動障害物を回避する経路は有向エッジとなる。
静止障害物に対する可視グラフの生成手順を示す。まず、環境地図の障害物位置からコンフィグレーション空間障害物の頂点を生成し、頂点をノード候補とする。次に、他のコンフィギュレーション障害物に重なっている頂点をノード候補から取り除く。次に、2つの障害物を取り出し、位置関係からノード候補である頂点に対して、2点間にエッジを張る。このとき、図に示すように障害物間の頂点同士が接線とならないものはエッジを張らない。これを繰り返し、全ての障害物の対にエッジを張る。

図22: 障害物間のグラフ
さらに図のように初期地ノードと目的地ノードを追加し、障害物の接線となる障害物の頂点ノードに対してエッジを張る。

図23: 初期地と目的地と障害物間のグラフ
本研究では、建物の地図情報、RFIDタグからの位置情報が得られるという仮定に立ち、移動体の現在位置と最終目的地との直線最短距離の位置関係があらかじめ知っているものとした。グラフが目的地に達していない場合、目的地に近い障害物の頂点ノードをサブゴールとして選択するようにした。
初期地点を環境地図の原点として回避経路を計画しても、距離情報を取得した時から回避制御を開始するまでの計算時間が存在するため、計画した経路通りの制御ができない。そこで、初期地点を経路計画後の回避制御を開始する地点として経路計画を行う。制御開始点は距離情報を取得した時から回避制御を開始するまでの計算時間、現在の移動体の進行方向、移動速度から算出する。
また、図のように初期地点がコンフィグレーション障害物に含まれている場合がある。この場合、コンフィグレーション障害物の初期地点に一番近い辺を初期地点まで平行に移動させ、コンフィグレーション障害物内に初期地点を含まないようにしている。

図24: 初期地点を含むコンフィギュレーション障害物の縮小
このグラフに対して、初期地点から目的地点にDijkstra法を適用して最短経路を求める。静止障害物を回避する場合に最終的に生成された経路を図に示す。

図25: 経路生成による静止障害物回避
生成された最短経路は、移動障害物をすべて取り除いたときの経路である。この経路に対して、移動障害物との衝突判定を行う。
衝突判定は接続された2点のノードとエッジを取り出し、初期地ノードから順に行う。まず、初期地ノードを始点ノードとし、接続されるノードを終点ノードとする。ノードには最短経路を求めるときに、初期地からの経路距離を保持しておき、移動体の移動速度からノードに到達する時間を算出する。始点ノードの到達時間を基に移動障害物の位置を移動させる。移動体と移動障害物との相対移動ベクトルで移動させた相対移動軌跡がコンフィギュレーション障害物と干渉が無いか検査することで衝突判定を行う。移動体の移動ベクトルの方向は始点ノードに対する終点ノードの方向である。この検査を全移動障害物について計算する。ここで、この計算は移動障害物位置を固定し、移動体が相対ベクトルで移動する空間を仮定している。干渉しなかった場合は、終点ノードを始点ノードとして、次のノード間で衝突判定を行う。
干渉した場合は回避障害物リストとして保持し、新たな回避経路を追加する。つまり、始点ノードからの終点ノードまでのエッジを削除し、新たに移動障害物を回避する経由点を経由ノードとして追加することになる。本研究ではこの移動障害物を回避するために、移動速度を維持して方向変換のみで回避する。
まず、図は、相対空間上で移動障害物を回避するために移動体の移動ベクトルを変更する方法の例を示している。移動体は単位時間移動ベクトルAで移動し、移動障害物は単位時間移動ベクトルBで移動している。従って、単位時間相対移動ベクトルCは、移動体の単位時間移動ベクトルAを平行移動したベクトルA'と、移動障害物の単位時間移動ベクトルBを平行移動して方向を逆にしたベクトルB'との合成ベクトルとなる。移動障害物を回避するためには、単位時間相対移動ベクトルCの先端を、移動体と移動障害物のコンフィギュレーション障害物との接線の外側になるように変更する必要がある。例えば単位時間相対移動ベクトルC'に変更すると、変更後の移動体の単位時間移動ベクトルはA''で表される。

図26: 相対空間上での移動ベクトル変更
次いで、絶対空間上の回避経路および経由点を求める。図は、現在の移動体位置と、現在の移動障害物位置、最接近時の移動体の位置と最接近時の移動障害物位置の、絶対空間上の位置関係を示している。ここでは、まず、相対空間上で移動障害物との最接近点に到達する時間を求める。そのときの絶対空間上の回避移動ベクトルから、絶対空間上の回避経路と最接近点を求める。

図27: 回避経路の経由点
この最接近点を経由点とし、経由点を経由ノード、回避経路をエッジとしてグラフに追加する。追加される経由ノードとエッジが静止障害物によって遮られないか判定し、遮られる場合は追加しない。また、経由ノードを終点ノードとして移動障害物に対しても衝突しないか判定する。衝突すると判定された場合は、グラフに追加せず、その移動障害物を回避障害物リストとして保持しておく。つまり、障害物に衝突しない回避経路が選択されることになる。
ここで、回避障害物リストとして保持されている移動障害物は回避するべき移動障害物となる。この移動障害物は初期地ノードから始点ノードまでの各ノードについて回避経路および経由点を求め、グラフに追加する処理を行う。この処理により、移動障害物を回避する順序や同時に回避する移動障害物の数などが異なるパターンの回避経路を複数生成できる。
追加されたエッジは始点ノードからの有向エッジである。さらに、追加された経由ノードから、目的地ノードおよび静止障害物の頂点ノードに有向エッジが接続される。このエッジも静止障害物に遮られず、ノードから静止障害物の接線となる。
このようにグラフが変更された場合は、Dijkstra法を再び適用し、最短経路を求め、移動障害物との衝突判定を行う。初期地ノードから目的地ノードまでのすべてのノード間で衝突しないと判断されるまで、この処理を繰り返し行う。移動障害物を回避する場合に最終的に生成された経路を図に示す。

図28: 経路生成による移動障害物回避経路
生成された最短経路の初期地ノードに対する次のノードの方向を移動方向として制御する。これらの処理を逐次行うことで、デッドロック現象を回避し、より効率的な障害物回避が可能となる。
実験と考察
本節では、まずATを用いて行った移動障害物回避の実験について述べ、次に今回実現した移動障害物回避の課題や問題点についての考察を述べる。 本研究における提案手法の有効性を検証するために、ATを用いて移動障害物回避を実現し、その評価を行った。人間を移動障害物として、移動体と人間が廊下ですれ違うという実験を行った。まず、本手法の比較対象として、移動障害物と静止障害物を識別せず、移動ベクトルを考慮しない障害物回避手法による回避実験を行った。次に、移動障害物を識別し、移動ベクトルを考慮した障害物回避手法(提案手法)による回避実験を行った。そして、それぞれの手法について人間に接近する距離および時間を測定し、結果を比較することで提案手法の有効性の検証を行った。
0..3 実験方法
本実験は名古屋大学IB電子情報館南棟3階(東側)で行った。実験場所は直線の廊下で、幅は2m、床はパネルタイプのカーペットである。移動体と人間は、13m離れた地点を開始位置とし、お互いが真正面に向き合い、合図で同時に移動を開始する。移動体の目的地は人間の開始位置とし目的地に向かって移動する。人間の目的地は移動体の開始位置とし、目的地に向かって一定の速度で歩いてもらった。このとき、移動体はレーザレンジセンサを用いて、移動体前方と右側の移動体幅分の空間にある障害物との距離を逐次記憶する。移動体前方の空間の距離を測定することで、完全に人間を回避した時間および人間との正面での最接近距離を知ることができる。この実験では、前方に人間が存在しなくなったとき、完全に人間を回避している状態だとした。移動体右側の空間の距離を測定することで、壁から離れていく状況と人間が通過した時間を判断することができる。この実験を移動ベクトルを考慮しない障害物回避手法と移動ベクトルを考慮した障害物回避手法で行い、取得したデータで比較を行った。
0..4 実験結果と考察
各手法で10回走行し、前方の距離及び右側の距離と走行時間との関係を図、図、図、図に示す。

図29: 走行時間と前方距離の関係(従来手法)

図30: 走行時間と右側距離の関係(従来手法)

図31: 走行時間と前方距離の関係(提案手法)

図32: 走行時間と右側距離の関係(提案手法)
前方の距離に関するグラフを見ると、各手法とも10秒までは距離が単調に減少している。人間と移動体が徐々に近づいていることがわかる。移動ベクトルを考慮しない障害物回避手法はさらに接近し、移動体は人間に衝突している。このあと、右側の距離に関するグラフを見てみると、急激に壁から離れていることがわかる。これは、人間が目の前で静止した状態になったため、左側の空間に移動している。この回避手法では障害物を回避しようと変更した移動方向に進んでも移動障害物はさらに近づいてくるため、回避できない。グラフを見ると人間に衝突するまでは壁との距離がほぼ一定であり、直進している。計算上の回避経路は徐々に回避方向が変更されていくが、オムニホイールで微小角度の制御ができず、直進している。一方、移動ベクトルを考慮したグラフを見ると、10秒から13秒の間で急激に距離が増加している。この時間で完全に回避していることがわかる。最接近距離が1m?3mである。右側距離を見ると壁から徐々に離れ、滑らかに回避している。12秒から15秒の間で急激に距離が減少しているのは、人間が右側を通過したためである。この結果より、移動ベクトルを考慮した手法を適用することで、人間の進行を妨げず、不安を感じさせない回避が可能であることが確認できた。
関連研究
本章では、本研究に関連する自動走行可能な移動体に関する研究や移動ロボットの障害物回避に関する研究について述べる。
インテリジェント車いすロボット TAO Aicle
高齢化が進展すると、移動手段として車椅子を必要とする人の数が増えると予想される。車いすには手動式・電動式など様々なタイプのものがあるが、利用者の利便性や安全性を向上し、介助者の負担を軽減するためには簡単な操作で自律的に移動可能な車椅子が必要である。そこで、畑瀬らの研究プロジェクトでは自律移動が可能なインテリジェント車いすロボットTAO Aicleを開発している。また畑瀬らは、愛・地球博のロボットステージ内の屋外でもコースにて実証実験運用を行った。
TAO Aicleの外観は通常の電動車椅子と同じであるが、正確な自己位置認識のためのGPSアンテナ、障害物検出のためのレーザーレンジセンサが搭載されている。右肘掛け部前方には操作装置が設置されており、簡単な画面操作で車いすの目的地を指定することができる。また、TAO Aicleを走行させるためには自己位置認識精度を上げなければならないが、畑瀬らはGPS基地局を走行エリアの近くに設置して相対測位を行い、さらに床面にRFIDタグを設置し、車椅子の座面の下に取り付けられているRFIDリーダによって絶対位置の取得を行っている。
本研究とTAO Aicleの研究との類似点は、設定した目的地まで自動で安全に人間を移動させる点である。また、RFIDタグによる現在位置の認識、さらにレーザーレンジセンサを用いた障害物回避を行う点でも類似している。しかし、障害物回避において、Tao Aicleはあらかじめ形状が分かっている固定障害物をレーザレンジセンサで検出した場合には回避し、未知の障害物を検出した場合には停止する。
車椅子型自律移動ロボット DREAM号
近い将来訪れる高齢化社会においては、介護者の不足が考えられるため、高齢者や障害者が不自由なく生活するための新しい福祉技術の開発が望まれる。そのような背景で、大北らは車椅子型の自律移動ロボットDREAM号を開発している。DREAMは15年以上もの間、研究が続けられており、現在は第4世代目のDREAM-4まで世代交代をしている。
現在4世代のDREAMが存在する中で、DREAM-3では環境マップという地図情報を取り入れ、タッチパネル等で目的地地点を指示すればロボットが環境を認識して、目的地地点まで走行することができる。自律移動電動車椅子が環境を走行する場合に、地図中の車椅子モデルも同時に走行し、走行中に障害物を発見した場合にそれをマップ上に書き込み、車椅子モデルが走行経路を決定し、駆動情報を実機の駆動系に伝える仕組みになっている。また、周囲の環境認識に用いる超音波センサ、自己姿勢角認識に用いるジャイロセンサ、走行用モータシステムを左右輪独立に搭載している。
本研究とDREAM-3との類似点は、設定した目的地まで自動走行できることである。DREAM-3の自己位置認識は、左右輪に搭載しているロータリ・エンコーダからのパルスにより算出した走行距離と、ジャイロセンサから得た変化角から自身の位置と姿勢変化量を算出している。そのため、長時間走行していると誤差が蓄積していく可能性がある。また、DREAM-3における障害物回避は、超音波センサで障害物を発見したときに、それをマップに描き込み、マップの走行領域において左壁沿い・右壁沿い・壁に頼らない走行・交差点や曲がり角などの右左折の5種類の基本的な行動パターンとタッチ・センサの認識による緊急停止等と組み合わせた走行制御を行うため、移動障害物の動きを考慮していない。
全方位画像上の床領域に基づく移動ロボットの高速な障害物回避と自己位置推定
関森らは、ロボットサッカー「robocup」のグラウンドを想定した全方向移動ロボットを開発している。このロボットに搭載された全方位視覚から得られる床領域に基づいた高速な障害物回避方法と自己位置推定方法を提案している。まず、双曲面ミラーを用いて全方位映像を取得し、グラウンドの色である緑色部分を抽出する。 画像を中心から放射状にセグメント化し、それぞれのセグメントにおける緑色の割合から移動可/不可を判定して移動可能領域を算出する。また各方向における障害物までの距離を算出する。 モータから現在の速度を取得し、また目標速度、制限加速度から速度を動的に制御している。また、各方向に制動をかけると仮定したときの、処理単位時間後の自身の位置と障害物に衝突するまでの時間Tjを求め、Tjを閾値で移動可能/不可能に判別し、目標方向に最も近い方向jを選びそちらに制動をかけることで、障害物回避を行っている。 また、移動可能領域を利用して凸包列を作成し、その形状とテンプレートに用意されたグラウンドの形状を比較し、自身の位置を推定している。
この手法は床面の色が単純な場合にのみ利用可能であり、さまざまな場所を移動する移動体には利用できない。 同様に実環境では移動可能領域と不可領域を完全に分割できるとは限らない。 ロボットの移動速度を考慮した障害物回避を行っているため、スムーズな回避軌道であるが、障害物の移動を想定していない。
不確かさを考慮した移動ロボットのための視覚とそのプランニング
三浦らは、移動ロボットのタスクとして、安全かつ効率的な目的地までの移動を考え、そのために必要な視覚環境認識手法とそこで有効な視覚認識のプランニング手法を提案している。未知環境において、センサ特有の不確かさを補うために、全方位ステレオカメラとレーザーレンジセンサで得られる周囲のマップを確率モデルで統合している。また、時系列で保存した各方向の距離データを照合し、自身の移動量推定を行っている。効率良く必要十分な情報を獲得するためのプランニングとして、与えられた経路上の視点を計画している。1回の認識にかかる時間を一定とし、速度は視点の間隔で決定している。
この手法では、空間の広さや進もうとしている領域についてどの程度分かっているかによって速度を変化させ、より安全で効率的な移動を実現している。しかし、移動障害物の移動を考慮していないため、速度の変化によって衝突の可能性が高くなってしまう場合がある。
同時自己位置地図獲得手法を用いた自律移動ロボットの環境認識
竹澤らは、移動ロボットが未知障害物の存在する空間内で3次元的な画像情報から特徴点を抽出、認識しながら自律移動し、目的地に安全に到達できるように制御することを目的とし、時間進行とともに、獲得されつつある地図情報からリアルタイムで再構成される局所的なボロノイ分割に基づく時間依存型の経路選択法を提案している。まず、移動ロボットに搭載したステレオカメラにより環境内の特徴点を抽出する。この特徴点をボロノイ母点とし、走行領域を分割する。分割された領域の境界は該当する領域の母点のどちらからも最短の位置を示す線となる。この境界が移動ロボットの理想走行経路となる。ロボットの現在位置と最終ゴールとの相対位置はあらかじめわかっているものとし、ダイクストラ法により最短経路を生成する。
ボロノイ分割により生成された経路は、障害物から最も離れた経路となるため、安全であるが効率的ではない。また、移動障害物の移動を考慮していないため、衝突の危険性がある。
全方位カメラを用いた多重分解能処理による移動ロボットの実時間行動探索
岩田らは、経路計画にReal-Time A*(RTA*) を用いて、実時間探索をしながら経路を獲得する経路計画手法を提案している。RTA*では、グラフの探索を一定の深さまでに限定することで計算量を少なくしている。このRTA*は、最適経路を保障しないが、実行可能解が必ず得られることを保証する。また、グラフ探索を行うために、より少ない計算コストで未知空間に空間中のコンフィグレーションに対応したグラフ点を生成するルールベースなセル分割によるグラフノード生成アルゴリズムを提案している。さらに、実時間性を確保するために、空間分割において、分割の大きさをセンシング情報から決定し、状況に適した分解能で空間表現をする、多重分解能処理を提案している。これは、ロボットと障害物との距離に応じてセル分割の細かさを状況に応じて変化させることで、環境探索の精度と移動速度のどちらを重要視するかを切り替え、ゴールまでの到達時間を短縮し、かつ、ゴールまでの経路生成の安定性を向上させている。センシングから移動までの、1制御周期当りの計算機の処理時間はほぼ一定なので、粗く環境探索した部分では速く移動、細かく探索した部分ではゆっくり移動することができる。これらの有用性を、シミュレーションと全方位視覚を有する移動ロボットの走行実験により検証している。
この手法では、障害物の近くでは障害物に沿うような移動、障害物から離れたところでは大きな移動をしている。障害物の近くでは、移動障害物の移動を考慮していないため、衝突の危険性があり、効率が悪くなる場合がある。
人間と共存協調するロボットのための回避行動の生成
田所らは、ロボットの回避行動生成のための人間の行動予測モデルを提案している。このモデルによって、確率的に予測される人間の動きをもとにして、移動ロボットの回避計画を行っている。回避過程を動作予測、危険度の評価、経路の決定の3ステップに分割している。確率過程モデルを用いた行動予測器により近い未来の複数の人間の動きが予測される。その結果、各時刻における障害物の存在確率マップが得られ、危険度が予測される。危険度、経路長、直線性、エネルギー変化を用いて計画軌道の評価関数を構成し、評価関数を遺伝的アルゴリズムにより最適化することによってロボットの起動を決定している。
人間の動作の確率的予測を行う空間は、室内などのレイアウトが既知の2次元平面としている。その中を1辺30cmの正方形セルに分割し、それぞれのセルに場所固有の状態遷移確率の値を与えている。確率の値は、壁に近づくにつれて壁と反対方向に進む確率が高くなる、交差点の近くでは進行方向が変わりやすく、速度が遅くなることが多い、など試行錯誤的に決めている。
この手法では遺伝的アルゴリズムのパラメータや評価関数、行動予測の確率を適切に設定する必要がある。また、行動予測の確率の設定のために、壁や通路、交差点などの識別、またはあらかじめ作成された地図が必要である。
まとめと今後の課題
まとめ
筆者の所属する研究室では、移動体に情報処理と通信機能を搭載し、情報処理と人間の物理的な行動を連動させる、搭載型コンピューティングのコンセプトに基づいて個人用知的移動体ATの研究と開発を行っている。ATはオムニホイールと呼ばれる複合車輪を用いて、全方位移動とその場回転を行うことができる移動体である。また、目的地を設定することによって、現在位置から目的地までの自動走行を行うことが可能である。本研究では、ATが自動走行を行うときに必要となる障害物回避において、環境認識時に静止障害物と移動障害物をリアルタイムに判別し、移動障害物の進路を考慮した経路計画・動作を行うことで、安全かつ効率的に移動障害物を回避する手法の提案・実装を行った。さらにATを用いて人間を回避する実験を行い、提案手法の有効性を確認した。
第2章においては、ATのコンセプトおよび構成、機能について述べた。まず、ATの研究領域として4つの軸について述べ、それらに対応する既存研究、本研究の位置付けについて述べた。そして、移動障害物回避を実現するために用いる移動体、デバイスについて述べた。
第3章においては、自動走行を実現するために必要な障害物回避の問題について述べた。この問題を解決するために環境認識に注目し、静止障害物と移動障害物をリアルタイムに判別し、移動障害物の移動ベクトルを算出する仕組みを実現した。環境認識用デバイスに高速かつ安定した距離情報を取得可能なレーザレンジセンサを用いて、ATの周囲360度の環境地図を作成する。そして、ICPアルゴリズムを使用して、複数位置で作成された環境地図を統合し、統合時に対応しないものを移動障害物として識別する。移動ベクトルは、過去の移動障害物の情報を参照し、平均化することで安定した移動ベクトルを求める仕組みを実現した。
第4章においては、障害物を回避するために移動体をどのように移動させるかというナビゲーションの問題について述べた。この問題に対して、本研究では逐次取得した環境地図および移動障害物の移動ベクトルに基づき、即座に経路を計画することで、効率的かつ安全な回避手法を提案した。そして、提案する移動ベクトルを考慮した場合と、従来手法である移動ベクトルを考慮しない場合とで回避動作の効率性を評価するため、走行実験によって回避動作を開始する時点での移動障害物との距離を比較した。これにより、移動ベクトルを考慮した手法を適用することで移動障害物である人間の進行を妨げず、かつ不安を感じさせない回避が可能であることを確認できた。
今後の課題
0..5 移動ベクトルの誤差による問題
本研究では、移動障害物の移動ベクトルを算出する際、移動ベクトルを安定させるため、過去の移動ベクトルを平均化した。しかし、この手法では、移動障害物が一定の方向へ直進している場合や一定の方向へ曲がっているときは、平均化したベクトルが実際の移動ベクトルと一致する可能性が高い。しかし、突発的な動きがあったときは、誤差が大きく対応できないという問題がある。また、形状の変化があるものや向きによってレーザレンジセンサで検出する点が大きく異なるものは、移動ベクトルの誤差が大きくなる。この誤差により、狭い通路を走行するとき、移動障害物が通路の端を移動していたとしても、移動ベクトルが通路の中央に向いたとすると、移動体の走行経路がないと判断され、停止してしまうことがある。そこで、複数のセンサを用いて、より正確な移動ベクトルを求めることが考えられる。例えば、移動障害物が人間であれば、カメラを用いて顔を認識することで、移動方向を推定することができる。
0..6 死角から現れる人間に関する問題
本研究では、環境認識にレーザレンジセンサのみを用いて障害物回避を実現したが、レーザレンジセンサでは交差点のような死角となる領域は検知できない。つまり、物陰から突然現れた移動障害物に対しては対応することはできない。交差点から人間が突然現れたときに対応するためには、環境設置型のセンサやほかの移動体からの情報を利用して、死角から接近する障害物に対応することが考えられる。
0..7 回避経路での速度調整
本研究では、障害物を回避するときの移動速度は移動体の移動誤差を考慮して一定として計算している。しかし、速度調整を行う障害物回避を実現できれば、素早く回避することで最短経路を走行できたり、広い空間では速度を上げて効率よく移動し、狭い空間では速度を落として安全に移動することができる。
謝辞
本論文の執筆にあたり、指導教員である長尾確教授のご指導をはじめ、多くの方々のご協力をいただきました。心より御礼申し上げます。
長尾確教授には、研究者としての心構えから、研究活動及びプレゼンテーションに至るまで幅広い御指導を頂きました。また、学会発表を始め、数多くの貴重な体験をさせて頂きました。深く感謝申し上げます。
大平茂輝助教には、研究活動の中で数多くの御指導を頂きました。特に、毎回のゼミにおいて、研究に関する貴重な御意見を頂きました。
研究室OBである、山本大介さん、成田一生さん、林亮介さん、伊藤周さんには、研究室在籍中に、研究やプログラミングに関する御指導、御意見を頂き、また、研究室での活動の中でも大変御世話になりました。
長尾研究室メンバーの土田貴裕さんには、プログラミングに関するアドバイスを始め、研究活動全般に関する助言を頂きました。石戸谷顕太朗さん、増田智樹さんには、ゼミにおける貴重な御意見を始め,研究室の活動の中で大変お世話になりました。安田知加さん、森直史さん、井上泰佑さんには同じプロジェクトの一員として、毎回のATの走行実験で協力して頂いたり、プロジェクトゼミでの多くの有益な意見を頂いたりと、研究を進めるにおいて様々な場面でお世話になりました。また、木内啓輔さん、杉浦広和さんにはゼミにおいて有益な御意見を頂きました。深く感謝申し上げます。
長尾研究室の秘書である鈴木美苗さんには、不自由なく研究活動が行えるように、研究室生活全般に関するサポートをして頂きました。
以上の方々を始め、本論文を執筆するにあたり、御支援、御協力頂いたすべての方々に、深く感謝の意を表します。
最後に、日々の生活を陰ながら支えてくれた家族に心より感謝いたします。