
知的移動体による美術館での鑑賞体験の個人化に関する研究
概要
美術鑑賞によって、我々は自身の感性や観察力を向上させ、潜在的な興味や関心を喚起させることができる。ゆえに、美術作品を見て頭を働かせ、様々なことに気がつく体験が豊かな鑑賞体験であると思われる。本研究では、効果的な鑑賞方法を熟知していない美術鑑賞の初心者を主な対象とし、屋内を自動走行可能な個人用の移動体を用いて、実世界の美術館における利用者1人1人の鑑賞体験を豊かにするシステムを提案・構築した。本システムは、利用者の過去の鑑賞体験に基づいて鑑賞コースを個人化することで、美術館での効果的な鑑賞体験を促すことができる。利用者が自動走行する移動体に搭乗して、美術館内を移動すると、システムはその利用者の鑑賞体験を暗黙的に記録する。
近年、美術館での鑑賞体験を支援するツールとして、展示作品について解説する音声ガイドだけでなく、携帯情報端末を用いた案内システムや作品推薦システムが開発・実用化されている。しかし、携帯情報端末の小型ディスプレイに表示される地図を参照しながらの移動は、利用者の鑑賞への注意を阻害するため、自動的に利用者を移動させる仕組みが望ましい。そこで、屋内で搭乗者を目的地まで自動的に移動させる自動トランスポーテーションを、全方位に移動可能な個人用知的移動体を用いて実装した。屋内での自動走行は、RFID (Radio Frequency Identification)タグをランドマークとした地図情報ベースの位置認識手法により実現した。
本研究では、「時間の有効活用」と「過去に鑑賞した関連作品との比較」が美術館での鑑賞体験を豊かにする要素であるとし、利用者が設定した美術館滞在予定時間内で、その利用者が過去に鑑賞した作品と関連する作品を巡るコースを生成する手法を実現した。利用者が作品を鑑賞した時間は、音声解説用のヘッドフォンに装着した3軸角度センサにより取得する利用者の頭の向きと、鑑賞中の移動体の停留時間から暗黙的に推定する。
さらに、本研究で構築したシステムの有用性を確認するために被験者実験を行った。被験者は、簡易的な模擬美術館での制限時間付きの鑑賞体験を、携帯情報端末を利用した場合と、本システムを利用した場合の計2回行った。その結果、被験者の90%が、本システムを利用した方が「携帯情報端末を利用するよりも充実した鑑賞体験が可能だった」、「作品に関して気付いたことが多かった」と回答した。この結果から、本システムの有用性を確認することができた。
1 はじめに
近年、情報化社会がますます進展し、我々の身近には大量の情報が存在している。そして、それらの情報は、人間の実世界での活動と密接に結び付けられ、人間に与えられることが重要である。旅行中の人には、旅先として訪れた土地の歴史や、その土地で人気のあるお店の情報が与えられることが望ましく、美術館で美術作品を見ている人には、その時に目の前の作品に関する様々な情報が与えられることが望ましい。
また、情報は、1人1人の人間に特化した形で与えられることも重要である。たとえ、我々の実世界での活動に結び付いた情報が与えられたとしても、その情報の量が膨大であり、与えられる人間の興味や嗜好に適合していなければ情報はあまり意味をなさない。旅行中であっても、歴史に興味が無い人には、訪れた土地の歴史に関する情報は価値の低いものになってしまう。さらに、美術館のような見るべきものが数多く存在するような場所では、適切に取捨選択された情報が人間に与えられることが望ましい。
そこで本研究では、人間の実世界での活動と連動しながら、個人に特化された情報が与えられることが必要となる1つの例として美術館を取り上げる。実世界の美術館において、各利用者に適応する情報を、利用者の活動に連動させて提示することで、我々の生活する実世界と情報の世界をシームレスにつなぐことを目指す。
現在、我々の実世界での活動と情報を密接に結び付ける方法として、情報端末を常に持ち歩いたり、身に付けたりして利用する、モバイルコンピューティングやウェアラブルコンピューティングなどがある。しかし、上記のような考え方のもと情報端末の小型化・高性能化が進んでも、携帯情報端末を持ち歩くだけでは、人間の物理的な行動に連動させて情報処理を行い、その結果を直接的に人間の行動に対して反映させることには限界があると考えられる。例えば、人間が認識していない危険が迫っている場合に、携帯情報端末はその危険を回避するように通知することは可能でも、実際に回避を行うのは人間であり、安全に回避を行うよう人間を動かすことは不可能である。それゆえ本研究では、人間が情報端末を持ち運ぶという発想をさらに発展させた、情報端末を移動体化するという方法で、人間の活動と情報を密接に結び付ける。
筆者の所属する研究室では、人間の生活において最も基本的で重要な要素の一つである「移動」に着目し、人間を物理的に移動させることが可能な移動体そのものを情報端末とするという発想で、人間の「移動」と情報端末との新たな関係を見出そうとしている。そして、乗り物に情報処理・通信機能を持たせ、情報処理と人間の物理的な移動とを連動させる、搭乗型(マウンタブル)コンピューティングという方法で、我々はAT (Attentive Townvehicle)と呼ばれる情報端末化された個人用知的移動体を設計・開発している。
ATは、搭乗者である人間や、AT自身を取り巻く環境に適応し、通信によって協調的に動作することが可能な移動体である。ATが移動体と情報端末の2つの側面をもつ利点の一つとして、移動に伴う環境の変化に応じて、暗黙的に様々な方面から搭乗者を支援することができる点が挙げられる。例えば、周囲に障害物が多い場合に移動方向や速度を自動的に調整して安全な走行を支援したり、現在位置や移動履歴を考慮して搭乗者に適した情報を能動的に提供したりすることがATは可能である。このように、搭乗者である人間は、特に意識することなく、実世界状況や文脈に合わせて、その時点で最適なサービスを受けることができる。
またATは、自動車やバイクなどの乗り物とは異なり、屋内と屋外の両方で利用されることを想定した、一人乗りの小型の移動体である。そのため、ATを利用して移動する際の移動の粒度は自動車やバイクなどに比べてかなり細かくなければならない。さらにATの動きは、いつでも好きな向きに旋回でき、どの方向にも即座に動き出せるという、人間の動きにより近いことが望まれる。そこで、現在我々が開発中のATは、駆動系にメカナムホイールと呼ばれる特殊な車輪を用いて全方位移動とその場回転を実現している。自動車やバイク、自転車では不可能であった左右へのスライド走行、移動体の中心を回転中心とするその場回転を実現することで、人間の直感に合った動きが可能になった。また、操縦には比較的馴染み易く直感的操縦が可能なゲーム機のリモコンを、各種設定や情報アクセスを行う際のATの操作にはタッチパネルをそれぞれ用いることで、ATのユーザインタフェースを可能な限り簡便化し、ユーザの直感に合った操作・操縦の実現も目指している。ATのシステム構成・操作方法については第3章で詳しく述べる。
これまで筆者は、ATを用いて自動トランスポーテーションの研究を行ってきた。自動トランスポーテーションとは、移動体が人間を乗せて自動的に走行し、搭乗者が設定した目的地まで安全に連れていくというシステムである。また、走行中や目的地到着時に、必要に応じて目的地に関する情報を搭乗者に対して提示する情報端末としての機能も兼ね備えている。このシステムによりATは、足が不自由な人の移動や長距離の移動といった、単なる人間の移動を支援する電動車椅子や自動車のような移動体としてだけでなく、運転を必要とせずに目的地まで人間を安全に移動させる移動体としての役割も同時に果たす。さらにATは、飛行機や電車などの大量輸送トランスポーテーションでは実現できない、個人に適応してそれぞれの目的地まで連れていくことが可能である。本来、ATによる自動トランスポーテーションシステムは屋外と屋内の両方で実現されることが望ましいが、我々は大規模屋内施設でのATの利用を想定し、屋内での自動トランスポーテーションの開発・実現に力を注いできた。屋内における自動走行の実現方法の詳細に関しては、第3章の後半で述べる。
屋内自動トランスポーテーションでは、まず目的地を設定しなければならない。しかし、大規模な屋内施設の中にある、たくさんの目的地から自分が目指す目的地を見つけ出すことは、搭乗者にとって非常に負担である。この負担を軽減する仕組みの一つに、既存のカーナビやインターネットで用いられている検索システムが挙げられる。行くべき目的地が明確な人にとっては、キーワードや目的、あるいは地図上での位置から目的地を絞り込んで見つけることが容易に行える検索システムが望まれるであろう。また、大規模な病院や空港のような施設においては「体調が悪いので医者に診察してもらいたい」「○○行きの飛行機に乗りたい」というように、目的は明確でもその目的を遂行するためにどこへ行くべきかをユーザが自身で決定できず、施設側の人間の指示を必要とする場合が想定される。その場合、自身の症状を入力すると向かうべき診療科や医師を決定したり、航空チケットを提示すると向かうべき搭乗ゲートを目的地として自動で設定したりする仕組みが有効であると考えられる。
ところが、美術鑑賞の初心者がもつ「美術館で充実した絵画の鑑賞をしたい」という目的のように、目的を達成するために移動を伴うが、ユーザに適した目的地や移動経路をユーザ自身はもとより、施設側の人間でも一意に決定することができない場合、自動走行可能な移動体は目的地設定の仕組みとしてどのような機能を兼ね備えているべきであろうか。本研究では、ATを用いて美術鑑賞初心者の美術館での鑑賞体験を豊かにするシステムを実現することにより、この問題解決に取り組む。
近年我が国では、公共・民間を問わず、美術館の数は1970年代以降増加の一途をたどっており、海外の作品や秘蔵されている作品に会う機会はかつてよりも格段に増えている。筆者の所属する大学周辺の地域でも、愛知県内の各都市に新しい美術館が誕生し、所蔵作品を紹介する常設展だけでなく、企画展も大小さまざま開催されている。しかしその一方、美術館の利用者は近年減少傾向が続いている。この問題を深刻に受け止め、全国の美術館では作品をより魅力的に見てもらうための工夫を模索している。その一例として、青森県立美術館で実施されている、学芸員による作品の説明や鑑賞指導の様子を図に示す。しかしながら、利用者各々に対して専属の学芸員が存在するわけではなく、利用者1人1人の鑑賞体験の質を高める方法に対する明確な答えは依然として得られないままであるといわれている。

図1.1: 学芸員による作品の説明や鑑賞指導の様子
美術鑑賞はテレビや映画鑑賞とは違って受動的な態度で楽しめるものでなく、自らの意思で眼と頭を働かせる能動的な態度で取り組んで初めて楽しみが得られる活動である。それゆえ、誰でも簡単に楽しい美術鑑賞を体験することができるというわけではない。実際、美術を専門とせず、美術に関する知識を豊富に持たない一般的な人々の多くは、美術館を訪れて多数の作品と出合い、それらの作品1つ1つと自分なりに考えて向き合いながら長時間かけて美術鑑賞をしても、結果として作品の印象以上に疲労感を残してしまう。このような人々は、美術館というと「行くと足が疲れる」「有名な作品でないとつまらない」「どのようにして作品を見ればいいのかわからない」というイメージを抱いてしまいがちである。
また、最近は情報が豊かになり複製であればインターネットや本などで様々な美術作品をいつでも見ることが可能になった。インターネットや本では、作品だけでなく、作品に関する補助的な情報も一緒に得られるため受動的な態度でも作品について理解したような気がしてしまう。それは、自分で実際に作って食べていないのに、グルメ本を読んだり、料理番組を見たりしただけでその料理について理解した気持ちになることと同じで、本来の体験ではない。しかし、それで満足している人も少なくないのである。このことも美術館利用者が減少している原因の1つであると考えられる。
以上の考察から、美術作品に対して主体性を持ち能動的に接するための方法を知らない初心者が、実際の美術館において、疲労感を感じない程度の短い時間で美術鑑賞を楽しむことができるようになるための支援システムが現在必要とされていると言える。そして、その支援を実現するためには、展示されている数多くの作品から利用者が鑑賞すべき作品を選出し、美術館で本物の作品が醸し出す厳かな雰囲気を感じながら作品を目の前にして、それに関する補助的な情報を得られるようにすることが重要であると考えられる。
美術鑑賞についてさらに考察を深めると、美術館での鑑賞と旅行先での観光は、屋内と屋外という規模の違いはあるものの、見るべきものがたくさんある中で、選択し計画的に行動して有意義な体験をするという点で非常に似ていることに気が付く。そこで、旅行先での充実した観光を支援するための仕組みとして、現在多くの人々に利用されている観光地を巡るツアーについて考える。ツアーは予め決められた時間内に、人気のある場所や現地の人々が推薦するお店などを観光客が効率良く訪れることができるように計画されている。そのためツアーを利用することで人々は、慣れない土地で地図や案内板を見ながら現在位置と目的地までの経路を把握しなくても、迷って不安を感じることなくいろいろな場所を訪れることができる。また、事前に案内本でその土地について調べ、たくさんある観光スポットから時間や経路、移動距離の問題を考えながら行く場所を選抜する作業も短縮できる。さらに、観光中はその土地に詳しい引率者が、時と場所に応じて有用な情報を教えてくれるため、ツアーの利用客は短時間で楽に観光することが可能である。
ただしツアーでは、用意されたコースの種類が限定されており、集団で同じコースを巡るため、計画された目的地の中には各々の参加者がつまらないと不満に感じる場所も含まれている。ツアーの利点を活かしながらこの問題を解決するには、人々は大型のバスではなく自分専用の小型のタクシーに乗って各自の要求に適したコースを巡る方法が効果的であると考えられる。個人に専用のタクシーの運転手が存在し、その運転手が乗客のこれまでの観光経験を蓄積・把握しており、その経験を基に我々が事前に何も伝えることなく、訪れた土地ならではの美味しい飲食店や歴史的な場所など自分に合った場所へと案内することができたら、気のきいたコンシェルジュとして役立つのではないだろうか。タクシーの運転手は人々をお勧めの場所へと連れて行くだけでなく、移動と同時に有用な情報を提供することもできるため、人々は簡単に無駄なく、ツアーよりさらに充実した観光をすることができる。このような、個人に適応するタクシーの仕組みを屋内でATを用いて実現すれば、美術館での芸術鑑賞を満喫したいという目的を遂行するための手段として有効だろう。
そこで本研究では、屋内を自動走行可能な個人用の知的移動体ATを用いて、実世界の美術館や展示会において利用者個人の鑑賞体験を基にその人に適したコースを生成し走行することで、利用者の鑑賞体験を豊かにするシステムを提案し構築を行った。
本研究では、利用者の鑑賞体験を豊かにすることを、「利用者が計画的に設定した時間や疲労を感じない程の適度な時間内で、最大限に利用者の感性を高めること、すなわち利用者が様々な視点から美術作品を見て様々なことを感じられるようにすること」とする。そして、美術鑑賞初心者でも多角的な視点から作品を見ることができるようになるための方法として、「新たな作品と出会った時に、頭の中に記憶されている画像ファイルから関連のある作品を検索して比較しながら見ることが効果的である」という実際の美術館の学芸員による助言を基に、実世界の美術館で、かつ有限の時間内において、利用者のこれまでの経験から記憶に残っている作品と関連する作品を重点的に巡り、可能な限り作品同士を比較する機会を増やす仕組みを構築した。
具体的にはまず、利用者が予め設定した美術館滞在時間に合わせてシステムが生成したコースをATが利用者を乗せて自動走行し、コース上のいくつかの作品の前で停止する。利用者は作品の前で停止中、作品に関する解説を手元のディスプレイに提示される画像と、ヘッドフォンから流れる音声で視聴することができ、また気分や好みに応じて、自由に次の作品へATを進めたり、前の作品に戻したりすることもできる。解説を聞くためのヘッドフォンに3軸角度センサを搭載することで、常に利用者の頭の向きを取得し、その頭の向きとATの停止時間から各作品の鑑賞時間を計測する。鑑賞時間の長い作品は記憶に残りやすいという仮説から、次に訪れた美術館では、これまでの美術館で長時間鑑賞し記憶に残っていると推測される作品と関連する作品を中心に巡るコースを生成し、以前見たものと関連する作品の前で、どの作品とどのような観点で関連するのかを提示する。このシステムによって、過去の記憶を想起し、その記憶と目の前の絵を結び付けることで、美術鑑賞の初心者でも、ただ絵を見て解説を聞くだけではわからなかったことに気が付くようになり、より強く印象に残る作品を増やしていくことが可能になる。
以下に本論文の構成を示す。第2章では、美術館での鑑賞体験支援についてさらに詳しく述べ、作品推薦の必要性や自動走行する移動体に搭乗しながら鑑賞することの有効性を説明する。第3章では、個人用知的移動体ATと、ATによる自動走行の仕組みについての詳細を述べる。第4章で、美術館での体験記録に基づく鑑賞体験支援システムに関して、体験記録の獲得方法、鑑賞コースの生成方法などについて詳しく述べ、ユーザビリティを評価するために行った実験についても述べる。第5章では、関連研究について紹介し、最後の第6章で、まとめと今後の課題を述べる。
2 美術館での鑑賞体験支援
本章では、本やインターネット上ではなく実世界に存在する美術館において、人々が豊かな鑑賞体験をするために必要な支援について述べる。そのためにまず、本研究において支援の対象となる人々と、豊かな鑑賞体験について定義し、その上で鑑賞体験をより充実させるための新たな支援方法について論じる。そして本研究で提案・構築した鑑賞体験支援システムの全体像を説明した後、最後に実世界の美術館において本システムの利用を想定した場合の、混雑緩和や鑑賞体験の共有に関する可能性についても述べる。
2.1 初心者にとっての豊かな鑑賞体験とは
本章では、本やインターネット上ではなく実世界に存在する美術館において、人々が豊かな鑑賞体験をするために必要な支援について述べる。そのためにまず、本研究において支援の対象となる人々と、豊かな鑑賞体験について定義し、その上で鑑賞体験をより充実させるための新たな支援方法について論じる。そして本研究で提案・構築した鑑賞体験支援システムの全体像を説明した後、最後に実世界の美術館において本システムの利用を想定した場合の、混雑緩和や鑑賞体験の共有に関する可能性についても述べる。
近年、我が国の美術館の数は増加傾向にあるにも関わらず、その利用者数は減少傾向にある。美術館側もこの現状を深刻に受け止め、利用者の増加を目指し、年齢や知識、関心の異なる様々な利用者に対して、紙のパンフレットの配布や音声ガイドの貸し出し、子供向けの学習用教材の配布や館内各所に設置したディスプレイを通した対話的な展示案内など様々な工夫をしている。近年では、ルーブル美術館をはじめとする世界中の美術館で音声ガイドは実用化されている。ルーブル美術館で利用されている音声ガイドを図に示す。他にも最近では、マルチメディア・ツールを活用することによって、美術館における来館者と美術作品とをつなぐアプローチを革新しようと試みる美術館も誕生している。しかし、全ての利用者1人1人が、美術館を訪れることによって何かを得られるようにするための方法に対する明確な答えは、依然として得られていないままであると言われている。

図2.1: ルーブル美術館で利用されている音声ガイド
美術館というと美術の専門家や美術愛好家でない一般的な人々にとっては、「足が疲れる」「有名な絵でないとつまらない」「どのようにして作品を見ればいいのかわからない」といったイメージがつきまといがちである。充実した美術鑑賞とはどのようなもので、美術鑑賞の面白さはどのような点にあるのかということを理解していない人が少なくない。残念なことに日本では、美術鑑賞の教育はあまり行われておらず、国語の授業で小説や詩歌の鑑賞を教えているのに対し、美術の授業では創作が中心となっている。美術鑑賞の方法は人によって様々で、自分に合った独自の鑑賞方法を見つけ出すことが最良であると思われる。しかし、独自の鑑賞方法を構築するためには、独学で画集を見たり、本を読んだりしなければならず、短期間で簡単には美術鑑賞の方法を身に付けることはできない。そこで本研究では主に、既に独自の美術鑑賞方法を持つ美術の専門家や美術愛好家ではなく、美術館を訪れてもどのように作品を見たらよいのかわからないと悩む初心者を対象とした支援システムを提案・構築する。
では、美術作品を鑑賞することで我々は何を得ることができるのか。ここで、本研究の最大の目的である「美術館での鑑賞体験を豊かにする」ということについて述べる。
美術作品はその鑑賞を通して、我々の感性や観察力を高めたり、潜在的な興味・関心を喚起させたりする可能性を秘めている。人々は美術作品を見たときに、視覚から得た情報を頭で自分なりに処理し、作者が作品に込めた意味を読み取ることや、その作品を制作した当時の作者の状況を想像することで、作品についての関心や理解を深めていくことが可能である。目の前の作品を見ながら、作者の意図を推察し得る部分を探したり、作者と自身の感じ方の違いを認識したりと、頭の中であれこれ考えることが、観察力や感性を向上させ、視野を広げることに繋がる。本研究では作品を見て思いをめぐらし、様々なことに気がつく体験を豊かな鑑賞体験とする。
2.2 初心者が豊かな鑑賞体験をするには
美術鑑賞はテレビや映画鑑賞などとは異なり、自分の意志で眼と頭を働かせて初めて楽しめるものであり、自分から能動的に作品を見る視点を見つけて、感じなければ自身の観察力や感性を高めることはできない。ゆえに、作品を多様な視点から鑑賞し解釈することができるようになること、これが鑑賞体験を豊かにするための必要不可欠な要素であると考えられる。しかし、美術鑑賞初心者にとって、作品を前にしたときにその作品を鑑賞するための糸口を自力で見つけ出すことは非常に困難である。
そこで、この問題を解決する効果的な方法として、作品同士の「比較」が挙げられる。美術館の学芸員によると、美術鑑賞の基本は「比較」にあり、「新たな作品と出会った時に、頭の中に記憶されている『画像ファイル』から関連のある作品を検索して比較しながら見ると作品を理解するための糸口が発見できる」という。ある作品とその隣に展示されている作品を比較して見るだけでも、作品に描かれている人物の表情、その人物のいる空間や、周囲に描かれている物、描き方の細さ、筆使い、タッチの大きさや全体の構図の取り方など作品を見るためのいろいろな糸口を見つけることができる。また、スミソニアン博物館で教育研究に従事していたFalkとDierkingは、長年にわたる博物館の見学者に対する観察や調査の結果から、新しい知識はそれまでの知識や経験に基づいて組み立てられるとし、文脈に基づく鑑賞支援が重要であるとしている。
以上のことから、初心者がより充実した鑑賞体験をするための基本は、頭の中に記憶されている過去に鑑賞した経験のある作品の中から、目の前の作品と関係のある作品を選出し、作品同士を比較することで新しい作品に対する理解を深めることにあると言える。それはまた、新しく出会った作品を様々な観点から解釈することを促進すると同時に、記憶として頭に残っていた作品に対しても新しい解釈を付け加え、その作品のデータを更新することに繋がる。そして、過去の記憶と新しい認識を結び付けることで、頭の中に記憶として残る作品データを増やしていくことが可能になる。
また、作品や作者に関する情報が、初心者にとって作品を鑑賞するための手助けとなることがある。つまり、作者が作品に込めた意味を読み取り、解釈を広げていくという美術鑑賞を行う際に、絵を「読む」ための技法や情報などは、人々の鑑賞体験を支える重要な要素となると考えられる。本やインターネットではそのような作品に関する多くの情報を作品と同時に得ることができるが、その情報を実際に美術館で作品を見るときには忘れてしまっていたり、思い出せないことが多い。
近年は情報が豊かになり、複製であれば本やインターネット上で作品をいくらでも見ることができるようになった。作品と一緒にその作品に関する様々な情報を取得したり、リンク情報によって関連作品同士を簡単に比較したりすることが可能になっている。このことが、美術館の利用者を減少させる一因にもなっていると考えられる。しかし、そうした補助的な手段によって作品に接したとき、作品についてわかったような、見たような気がしてしまう。そう思った時点で作品鑑賞がほぼ終了してしまっては美術館は作品の存在を確認する役割以上の存在意義はなくなってしまう。料理はグルメ本や料理番組を見ただけでは終わらず、自分で食べてみなければわからない。同様に、旅行も旅番組を見ただけで、その土地に行った気分になるが、実際にその土地へ行ってみなければわからないことがたくさんある。美術鑑賞に関しては、図版で見るのも実際に美術館で作品をみるのも視覚という同じ知覚手段によるものだけに、料理や旅行と全く同じではないが、本物の作品を間近で見ることと本やインターネットで画像を見ることとの間には差がある。ゆえに、美術館で本物の作品を見ながら、本やインターネットと同等の情報を得ることができる仕組みが必要である。
ここまでは、美術鑑賞の初心者が美術作品を前にしたときの鑑賞方法ついて述べてきた。それ以外にもう1つ、鑑賞体験を豊かにするための重要な要素がある。それは「時間」である。前述の初心者の美術館に対するイメージの1つに「美術館に行くと足が疲れる」というものがあった。確かに、美術館ではゆっくりと椅子に座って見ることができるのではなく、頭の中で考えを巡らせながら次々と作品を見て歩かなければならないので、心身共に消耗する活動と言える。そして、観賞開始から30分を過ぎた後に見た絵はあまり覚えていないという実験結果も得られており、初めに見たものは覚えやすく、その後は記憶が薄れていくという「初頭効果」という現象が起こるということも分かっている。美術館では入館料を支払っているのだから、「展示されている絵は全部見ないと勿体無い」と考えてしまう人が多いが、それとは逆に、無計画に数多くの絵を見続けると「感動が薄れて勿体無い」と考える方が、豊かな鑑賞体験をする上では効果的であると言える。また、国外には数多くの大規模な美術館があるが、国外など遠方で、普段は訪れることができないような美術館では、限られた時間内で最大限に満喫することが非常に重要である。
ところが初心者は美術館において主体性に欠け、展示されている作品を選択的に見たり、独自の順番で見たりすることをせず、順路に従って順番に1つずつ全部見る傾向がある。しかし、自身が記憶できる作品の量や疲労を感じない程度の時間に絞って作品を見て、見た作品全てから何かを得ることができる、それが次につながる理想的な鑑賞体験であると言える。
つまり、豊かな鑑賞体験をするには、時間を制限して鑑賞する作品数を絞ることと、過去の鑑賞体験に基づいて知識を広げていくことが効果的であると考える。
2.3 鑑賞体験支援システムの在り方
美術鑑賞は「娯楽としての美術鑑賞」と「教養としての美術鑑賞」の2つの側面をもつと考えられる。「娯楽としての美術鑑賞」とは、単純に作品を見ることで人々の心を落ち着かせる、元気を与える、明るい気分にさせるといった効果を発揮するもので、「教養としての美術鑑賞」とは作品を見て、さらに頭で考えを巡らすことで人々の観察力、想像力や感性を向上させるという効果を発揮するものである。近年、繰り返し利用することでユーザの興味・嗜好を蓄積してユーザモデルを生成し、ユーザの好みに合った絵画等を推薦するシステムが数多く開発・実用化されている。花の絵が好きでそれを見ると落ち着くと感じる人には、類似する「花」の絵を次々に推薦するシステムは役立つと思われる。ゆえに、ある種のセラピーとしての効果を求めて美術館を訪れる人には効果的なシステムになり得る。しかし本研究では、そのような、人々に癒しを与える「娯楽としての美術鑑賞」ではなく、人々の視野を広げる「教養としての美術鑑賞」の支援に対してアプローチしていくことにする。以下では、これまでに述べてきた教養としての豊かな鑑賞体験をするために効果的な作品の見方を、初心者が遂行できるようにするための支援システムの在り方について述べる。
2.3.1 鑑賞コースの個人化による時間の有効活用
美術館で鑑賞可能な時間が限られているために選択的に作品を見ていきたい利用者や、疲労感の残る無計画な見方を避けたいという利用者に対しての効果的な支援は、自動走行可能な移動体に搭乗して美術館内を巡らせることであると考えられる。美術館において主体性を欠く初心者は、勿体無いという心理から、周辺にある作品はどうしても見ようとしてしまう。そして結局、大規模な美術館で展示されている作品が多い場合、順番に見ていると膨大な時間が経過しており途中で鑑賞終了予定の時刻になってしまったり、作品を見すぎて疲れてしまったりするという結果に終わるのである。この問題を解決するためには、鑑賞を開始する前に全体の鑑賞時間を設定し、その時間に応じて予め鑑賞する作品を限定する、そして選出した鑑賞すべき作品を効率良く巡るコースを生成し、そのコース上を移動することが適切であると考える。
近年、開発・実用化が進む美術館での絵画鑑賞を支援するシステムには、小型で持ち運びが簡単な情報端末を用いて、利用者に応じた次に見るべき作品とその位置や、お勧めコースを提示するシステムが多い。“ルーヴル-DNP ミュージアムラボ”という実際の美術館で実用化されている小型情報端末を図に示す。しかし、これらのシステムでは、試験運用の結果としても現れているように、情報端末の小さい画面に表示されたフロア地図を見ながら、現在位置と地図との対応をとり、空間把握能力を駆使しながらシステムの推薦に従って移動する利用者は少ないことが問題として挙げられる。美術館で情報端末の地図画面を注意深く見ながら移動することは利用者にとって重要ではなく、逆に美術鑑賞への注意を妨げることになる。また、選択的に見ることに慣れておらず、主体性に欠ける初心者を、周囲にある作品を通り過ぎてでも、地図画面を見ながらその作品へ向かいたいという気にさせるには、次に鑑賞すべきと推薦する作品が利用者にとってどのように良いのかを提示しなければならない。しかし、たとえ情報端末の画面上でその内容を提示したとしても、適切なタイミングで利用者が見るとは限らない。
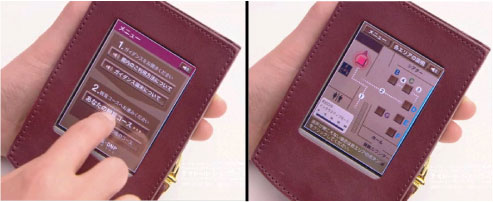
図2.2: 実際の美術館で実用化されている小型情報端末の例
上記のことを考慮すると、鑑賞時間を制限して見る作品の数を絞ることで、美術鑑賞初心者の鑑賞体験を豊かにするためには、初心者である利用者は自動走行可能な移動体に搭乗して移動することが最適であると考えられる。移動体に搭乗して、ある作品の前まで自動で移動し、その作品の前で停止、鑑賞終了後次の作品まで自動で移動して停止する、これを繰り返すことで利用者の予定時間や過去の鑑賞体験に応じて選出したいくつかの作品を効率良く結ぶコースを地図無しで巡る、という仕組みである。自動走行する移動体に搭乗して美術館内を移動すれば、移動に関しては意識しなくてもよく、その分移動中も本来の目的である美術作品の鑑賞に集中することが可能である。また主体性に乏しい初心者で、できるだけ多くの作品を見たいと考える人でも、自動走行する移動体に搭乗して館内を移動することで、選択的な作品の見方をすることが可能になる。
一方、自動走行する移動体により鑑賞作品、鑑賞コースを限定することで利用者の自由が制限されるという問題が生じるが、本研究では可能な限り利用者の不満を軽減するような仕組みを考え、制限時間内で充実した鑑賞体験を提供するという利点とのバランスを大事にする。予め生成した鑑賞コースに含まれていないが、自動走行中に気になった作品があればその作品の前で停止、あるいはその作品の前まで後戻りするといった制御を簡単に行えるようにすることで、自動走行に利用者の意図を反映させる。利用者の意図を無制限に反映させると、制限時間内でコースを完了することができなくなるが、利用者に鑑賞時間を意識させ、時間管理を促進することで、利用者が納得した上での自動走行を実現する。
2.3.2 個人化の指標となる鑑賞体験記録の蓄積
制限時間に応じて鑑賞すべき作品を選出する際、選ばれた作品は利用者に適した作品でなければならない。既存の研究では、鑑賞した作品を利用者が評価し、その評価に基づいて様々な観点で類似する作品を推薦したり、同じ作品を良いと評価した利用者が好む別の作品を推薦したりする手法が用いられてきた。本研究では、過去の観賞体験に基づいて新たな作品を見ることで作品に関する理解が深まるという「教養としての鑑賞体験」の観点から、鑑賞すべき作品の選出に、利用者が過去に美術館で鑑賞したことを覚えている作品と関連する作品を推薦するという手法を用いる。
そのためには、利用者が過去に訪れた様々な美術館で鑑賞したことを覚えている作品、すなわち個人の鑑賞体験記録を取得しなければならない。しかし、1つ1つの作品に対して利用者が鑑賞したことを記憶しているか否かを訊ねて明示的に評価する手法は、利用者に掛ける負担が大きい。そこで本研究では、各作品の鑑賞時間が、利用者の作品に対する印象の強さ、記憶に残る度合いを表す有用な指標になると考え、展示されている各作品に対する利用者の鑑賞時間を暗黙的に取得し評価することで、個人の鑑賞体験記録を取得・蓄積するという方法を用いる。
鑑賞体験記録を取得するには、どの作品をどのくらい長い時間見ていたかを知る必要がある。作品の判別には、作品付近に設置されたバーコードを利用者に情報端末で読み取らせたり、作品に割り振られた番号を端末に入力させたりする方法が、現在実用化されている鑑賞支援システムの中で一般的であるが、利用者にとっては、作品の前にいるだけで、特に何も操作することなく利用者の位置から、自動的にその人が注目している作品を判別するシステムの方が適していると言える。しかし、小型の情報端末を持ち歩くだけでは、屋内において正確な位置を把握することが現状では困難である。ところが、移動体が自動走行する場合、現在位置を把握することは必要不可欠であり、様々な手法やデバイスを用いることで屋内における正確な位置認識が可能となる。また、正確な鑑賞時間を計測するには、利用者がどちらを向いているのか、どんな状態にあるのかを認識しなければならない。利用者の頭の向きは、移動体に搭乗する場合も端末を持ち歩く場合も、搭乗者が直接身に付ける新たなセンサにより取得する必要があるが、利用者が停止しているか移動しているかという状態は、移動体を用いると容易に取得することができる。ゆえに、各展示作品に対する鑑賞時間を暗黙的に取得する方法は、利用者が情報端末を持ち歩くより自動走行する移動体に搭乗する方が適していると考えられる。
将来的には、全ての美術館において同様の機能を持つ移動体が導入され、鑑賞時間により暗黙的に利用者の記憶に残った作品を取得し、その記録を全利用者の鑑賞体験記録を保持するデータベースに登録されるような仕組みになることを想定している。この仕組みにより、利用者は自身が過去に訪れた美術館で鑑賞したことのある作品に関連する作品を次に訪れた美術館で中心的に鑑賞することが可能になり、そのことがより豊かな観賞体験に繋がるのである。
2.3.3 過去の鑑賞体験に基づく情報提示
過去に訪れた美術館で鑑賞した作品に関連する作品を次に訪れた美術館で中心的に鑑賞することができても、新たに出会った作品が、過去に鑑賞したどの作品と関連しているのかを利用者が知らなければ効果的な作品の鑑賞には繋がらない。そのため、訪れた美術館において過去に鑑賞した作品と関連する作品の前に到達したときに、利用者に目の前にある作品が過去に別の美術館で見たことのある作品と関連していることを気付かせる必要がある。本研究では、移動体に搭載されたディスプレイ上に関連する作品の画像、関連する観点を説明するテキストと過去に鑑賞体験があることを提示し、さらに音声情報によってそれらを補足することで、利用者の記憶を想起させ作品同士の関連を意識させる。
また、美術鑑賞初心者にとって、作品や作者に関する情報が作品を深く理解するための手助けとなったり、興味を持つ際の火付け役となったりすることがある。作者が作品に込めた意味を読み取り、解釈を広げていくという美術鑑賞を行う際に、絵を「読む」ための技法や情報などは人々の鑑賞体験を支える重要な要素となると考えられる。本やインターネット上ではそのような作品に関する多くの情報を得ることができるが、その情報を実際に美術館で作品を見るときには忘れてしまっていたり、思い出せないことが多い。けれども本来は、実世界の美術館で本物の作品を前にしている最中に、本やインターネットと同等あるいはそれ以上の作品に関する情報を獲得することが望ましい。一方、美術鑑賞は人々の想像力を向上させる場でもあるため、作品に関する補足情報は利用者によっては自由な想像を阻害するものになりかねない。それゆえ、作品に関する情報は利用者の必要に応じて選択的に視聴できるような仕組みである必要がある。
要するに、充実した美術鑑賞をするには、美術館で本物の作品が醸し出す独特な雰囲気の中で、本物の作品を見ながら、その作品に関する情報を取得することが効果的である。そのために、実世界の美術館と情報の世界の美術館をつなぐ仕組みが必要とされる。
2.3.4 まとめ
美術鑑賞によって、我々は自身の感性や観察力を向上させ、潜在的な興味や関心を喚起させることができる。ゆえに、本研究では作品を見て頭を働かせ、様々なことに気がつく体験を豊かな鑑賞体験とする。初心者が豊かな鑑賞体験をするためには、新たな作品と出会った時に頭の中に記憶されている『画像ファイル』から関連のある作品を検索して比較しながら見ることが効果的である。作品同士の比較により、作品に描かれている人物の表情や筆触の違いなど作品を見るための糸口を見つけることができる。さらに、過去の体験と新しい体験を結び付けることは、記憶に残る作品を増やしていくことにつながる。また、美術館での鑑賞は実世界での行動であるため時間的制約を考慮すべきであり、時間を有効活用する計画的な鑑賞体験を支援する仕組みが求められる。
以上のことから、利用者の鑑賞体験を豊かにするシステムが持つべき機能を以下に示す。
-
(a)鑑賞コースの個人化による時間の有効活用
-
(b)個人化の指標となる過去の鑑賞体験の蓄積
-
(c)暗黙的な位置認識および頭の向きの認識
-
(d)展示作品に関する情報提示
近年、世界中の多くの大規模美術館で作品の解説を聞くための音声ガイドが実用化されており、最近では音声だけでなく、画像も表示できるディスプレイを搭載したマルチメディアガイドが利用されている。鑑賞支援の研究分野では、小型の情報端末を用いて、利用者の作品に対する評価を記録し、それを基に作成したお勧めコースや、Web上の事前見学で利用者が作成したコースを提示するシステムが開発されている。これらのデバイスを用いたシステムと移動体を用いたシステムを上の(a)?(d)の観点で比較したものを表に示す。
小型の情報端末を用いたシステムでは、利用者に個人化したコースを提示することはできるが、地図を見ながら移動するという、美術鑑賞とは直接関係無い作業をする時間を利用者に要する。さらに、その作業は、利用者の鑑賞への集中を妨げる。また、自動走行する移動体は屋内における正確な位置認識が可能であるため利用者が見ている作品を暗黙的に取得できるが、音声ガイドや情報端末を用いる場合は作品に割り振られた番号を入力したり、IDを読み取らせたりしなければならない。現在は情報端末でも、無線LANやBluetoothの電波強度を用いた測位により、暗黙的な位置認識が可能な仕組みも開発されているが、位置算出やアクセスポイントの切り替えの処理に時間を要するという問題や精度の問題がある。鑑賞中の目の前にある作品に関する情報提示に関しては、実用化されている音声ガイドやマルチメディアガイドでも可能であるが、利用者の過去の鑑賞体験に基づいた情報提示は、鑑賞体験を記録可能な情報端末や知的移動体でなければ不可能である。表からもわかるように、知的移動体を用いることで、これまでに開発・実用化されているデバイスを用いた場合より、利用者にかける負担を軽減すると同時に美術館での鑑賞体験を豊かにすることが可能である。
3 個人用知的移動体と屋内自動トランスポーテーション
筆者の所属する研究室では、人間の生活において最も基本的で重要な要素の一つである「移動」に着目し、移動体を用いて人間を物理的に移動させるという発想で、我々の生活する実世界と情報の世界をより密接に関連付ける方法を探っている。人間にとって「移動」は、自立的かつ快適に生活するために必要不可欠な行動であり、我々は生活の大部分において「移動」しなければならない。そのために人間はこれまで、自動車・バイク・車椅子など様々な移動体を数多く作り上げ、現在も幅広くそれらを利用している。このことから、人間の「移動」と情報端末との新たな関係を見出すために、日常的な移動体そのものを情報端末とする手法が考えられる。つまり、乗り物に情報処理・通信機能を持たせ、情報処理と人間の物理的な移動とを連動させる、搭乗型(マウンタブル)コンピューティングという考え方である。この搭乗型コンピューティングのコンセプトのもと、情報端末化した移動体の一つとして、我々はAT(Attentive Townvehicle)と呼ばれる個人用の知的移動体を設計・開発している。 ATは、搭乗者である人間や自身を取り巻く環境に適応し、周囲の環境や他の移動体との通信によって協調的に動作することが可能な個人用の乗り物である。本章では、ATのコンセプトおよび構成、機能について述べる。
3.1 ATのコンセプト
搭乗型コンピューティングのコンセプトは、モバイルコンピューティングやウェアラブルコンピューティングというコンセプトを拡張して、いつでもどこでも情報処理を支援するだけでなく、移動や運搬などの物理的行動も同時に支援しようというコンセプトである。我々は新しい個人用の乗り物としてAT(Attentive Townvehicle)を開発し、それを取り巻く物理的・情報的環境に関する研究・開発を行っている。ATは人間中心の状況認識機能を持つ知的な移動体であり、人間はATに乗り込むことで、情報システムと一体化し、情報環境と物理環境をリンクすることができる。また、複数のATは協調的に動作することができ、安全に走行できるだけでなく、人間のコミュニティ活動や社会ネットワーク構築も支援することができる。
図に示すように、ATを用いた研究領域は多岐に渡っている。これは、人間と情報端末としての移動体の双方が密接に関わっているためだと考えられる。我々はATをより知的な移動体にするため、ATと「環境」「人間」「他のAT」という各要素間にある3つのインタラクションに「ATの個体としての自律性」を加えた4つの軸をもとに研究を進めている。図に示した、その4つの軸をこれまでに行われた研究とともに解説する。
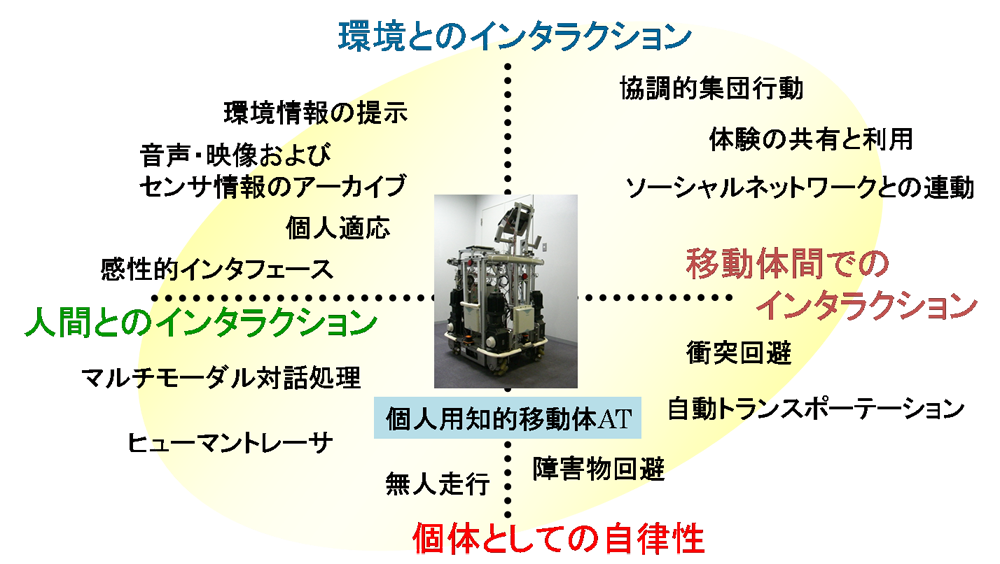
図3.1: ATに関わる研究分野
-
ATと環境とのインタラクション
ここでいう環境とは、物理的環境(実世界)と情報的環境(情報世界)の2つの意味を持つ。物理的環境とは、人間は感覚や運動により、ATはセンサ類やモータにより認識あるいは作用することができる現実世界の対象や状態を指す。一方、情報的環境とはATがアクセスできるコンテンツや情報サービスの集合を指す。これに関して行われた研究に、実世界対象物の認識手法や場所に連動した情報コンテンツの利用などがある。
-
ATと人間とのインタラクション
移動体がユーザの特性を把握し、移動体を利用すればするほどユーザに適応していく個人適応という研究課題がある。また、状況に応じた操作インタフェースを提供することも考えられる。具体的には、より直観的な操縦インタフェースを追求したり、非搭乗時の遠隔操作を可能にしたりするものである。これまでには、非搭乗時に自動的に人間を追尾する研究もおこなわれている。
-
AT間(移動体間)のインタラクション
移動体間通信を用いることで、AT同士は協調動作を行うことができる。それゆえ、接近中のAT同士が互いに通信して衝突回避を行う研究や先頭の有人のATを無人のATが追尾する連携協調動作の研究がこれまでに行われた。また、アドホックネットワークの仕組みを用いて周囲のATとコミュニケーションを行うことが可能になるため、ATを用いたコミュニケーション支援システムやATの搭乗時の体験を共有・再利用するシステムが構築された。
-
ATの個体としての自律性
人間の日常生活において基本的な要素である「移動」そのものを支援するために、感覚機能を強化し障害物回避を実現するといった、個体としての自律性を高める研究課題である。
以上のようにATは自身に搭載されたセンサ類や、AT間・ATサーバ間の通信によって3種類のインタラクションとAT自身の自律性を実現している。また、これらのインタラクションを通して獲得した情報を利用して、人間や環境への適応を可能にしている。
3.2 全方位移動
現在、我々が開発中のATの特徴の一つは、全方位に移動できることである。我々はそのような移動体を「オムニムーバー(OmniMover)」と呼んでいる。オムニムーバーは、アメリカ製の個人用移動体セグウェイのようにその場回転をして任意の方位を向いてから走行するものでなく、静止状態からならばどの方位にもすぐに動くことが可能である。ただし、既に動いている状態で任意の方向に動くためには慣性を考慮しなければならない。また、乗っている人間への加速度の影響も考慮しなければならないため、動いている最中はすぐに動きたいと思う向きに動けるわけではない。
それでも、全方位に動くことが可能であるということは、これまでの乗り物とは違った動き方ができるということである。それは、例えば障害物や人などの避け方に表れてくる。これまでの乗り物は、止まっている状態から真横に動くことができないため、障害物や人間が乗り物の間近に接近してしまうと回避しきれず衝突してしまう。
そこでわれわれの研究では、フォークリフト等にも使用されているメカナムホイールという技術を採用した。ここでは、メカナムホイールと、それを用いて実現した全方位移動のメカニズムについて述べる。
3.2.1 メカナムホイール
本研究で用いるメカナムホイールの外観を図に示す。メカナムホイールは、車軸に対して45度傾けられた小型のローラーを車輪の周囲に等間隔に8つ並べて取り付けられた車輪である。大きい本体としての車輪はモータによって制御することができるが、周囲のローラーは動力を制御できず、空転するのみである。メカナムホイールは正回転する際、ホイール自体は前方向に移動するように回転するが,車軸に対して45度傾けられた方向に配置されたローラーにより、ローラー軸方向に対して法線方向の推進力が生じない。この結果、メカナムホイールは,ローラー軸と平行の方向に進行する。したがって、4輪の進行方向の組み合わせによって全方向移動が可能となる。
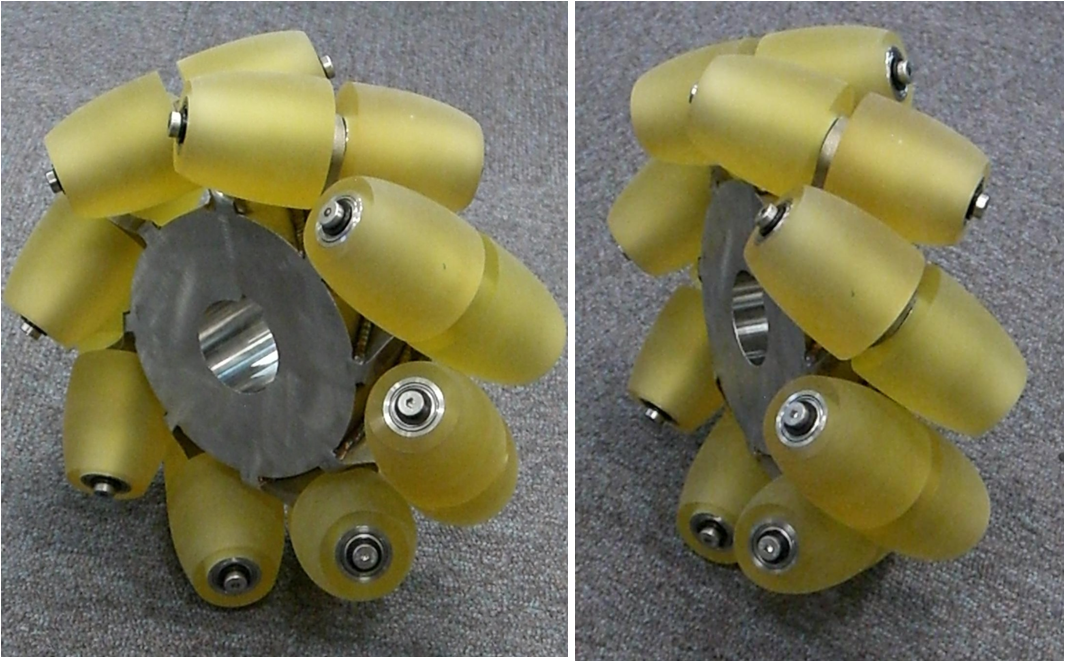
図3.2: メカナムホイール
ただし、メカナムホイールにはローラーの滑りが生じるので、メカナムホイールに働く力を解析することは困難である。ゆえに、モータに与えたホイールに対する出力値から正確な実際の移動距離と方向を把握することが難しい。このことは、モータの出力が全て推進力に変化するわけではないことを意味し、バッテリーの消費量に比べて実際の走行距離が短いという問題に帰着する。また、オムニホイールは弾力性に乏しいため、振動や衝撃の吸収力が非常に弱い。進行方向によっては、走行中に発生する震動が搭乗者に直接伝わり、快適性が損なわれるという問題もある。このような点はこれから改善していかなければならない。
3.2.2 全方位移動のメカニズム
全方位移動、およびその場回転は、ATに対して図のように平行に配置された4つのメカナムホイールを個別に制御することによって実現している。メカナムホイールとベルトでつながれた高トルクのサーボモータは任意の速度制御が可能であり、またトルクを0にすることで空転させることができる。前後左右に動かす時は、4輪の回転速度を等速にして、それぞれの回転方向(正転又は反転)を動く方向に合わせて調節する。例えば右方向へ動かす時は、図の(A)と(D)を正転方向、(B)と(D)を反転方向に動かすことで移動させることができる。車体から45度の方向へ動かす時は、右斜め前に移動することを例にとると、図の(A)のタイヤを反転方向、(D)のタイヤを正転方向に動かし、(B)と(C)のタイヤを空転させることによって、移動させることができる。それ以外の任意の方向への移動は、4輪の回転速度と回転方向を細かく調整することによって実現できる。なお、その場回転は、(A)と(C)を正転方向(あるいは反転方向)、(B)と(D)のタイヤを反転方向(あるいは正転方向)へ回転させることで実現できる。
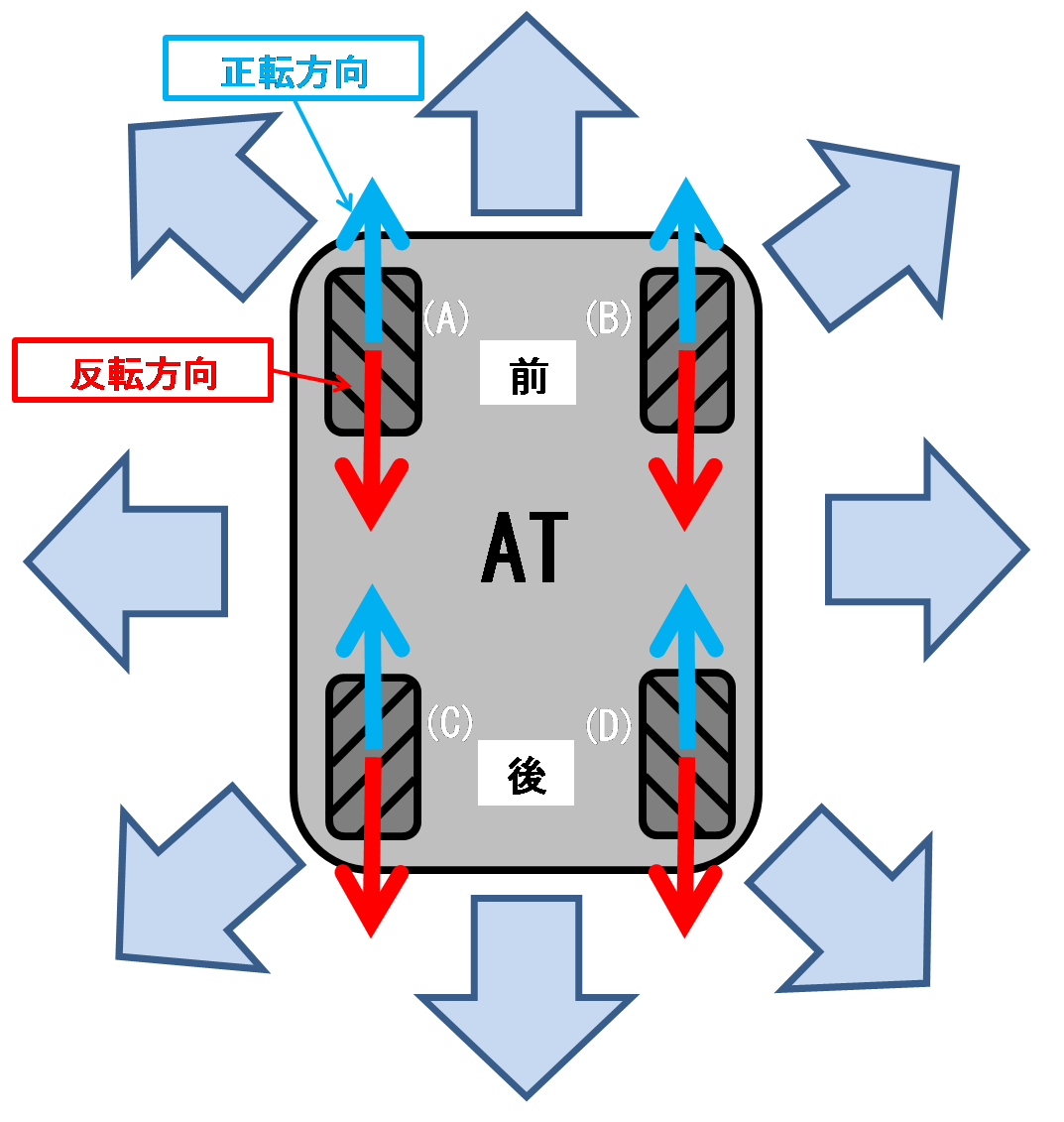
図3.3: 全方位移動のメカニズム
上記の方法により、駆動系に4つのメカナムホイールを用いたATは、本体の向きを変えずに任意の方向へ移動できるため、図のように障害物回避をスムーズに行う。これまでに実用化されている移動体には不可能な、静止状態から真横に移動する動作が可能になり、ATは障害物や人間が接近している場合でも衝突することなく安全な回避を行うことができる。
ただし、メカナムホイールを用いた全方位移動体のデッドレコニングは困難であるという問題がある。それは、横方向の移動や旋回動作を行う際に、ホイールに取り付けられたローラーが回転するため、移動距離が同じでも、進行方向によってメカナムホイールの回転数が異なることが原因である。
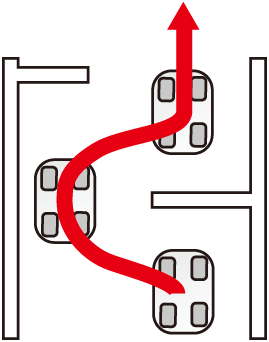
図3.4: 全方位移動による障害物回避
3.3 システム構成
前節ではATの駆動系について詳しく説明したが、ここではAT全体の構成について説明する。ATに搭載されたセンサ類やPCなどのハードウェアについて紹介した後、動作を制御するために実装したソフトウェアや搭乗者に対する操縦インタフェースについて説明する。そして、搭乗型情報端末として必要不可欠な通信ネットワークについて述べる。
3.3.1 ハードウェア及びソフトウェア
現在われわれの研究に用いるATの外観を図に示す。ATの駆動系には3.2節で述べたように、メカナムホイールと高トルクのサーボモータが用いられている。車体はアルミ材で構成されており、ATは屋外と屋内の両方で利用できるように、車体の幅を屋内の扉やエレベータの入口を通り抜けることが可能なサイズに抑えられている。人間は立った状態でATに搭乗し、自動走行をせず手動で操縦する場合、ATの走行は手元にあるアナログスティックを用いてコントロールする。また各種設定にはタッチパネルディスプレイを用いており、ATのユーザインタフェースはわかりやすい直感的なものとなっている。操縦インタフェースについては3.3.3節で説明する。
周囲の情報を取得するためATは、全方位に最大30mまで物体を検知可能なレーザレンジセンサと、RFID (Radio Frequency Identification)タグを読み取るためのRFIDリーダ、および3軸角度センサを図のように搭載している。これらのセンサを用いることで、移動に伴う環境の変化に応じて暗黙的に情報を獲得することができる。 ATを構成する主なセンサ・デバイスとその使用目的について表に示し、図にシステム構成図を示す。
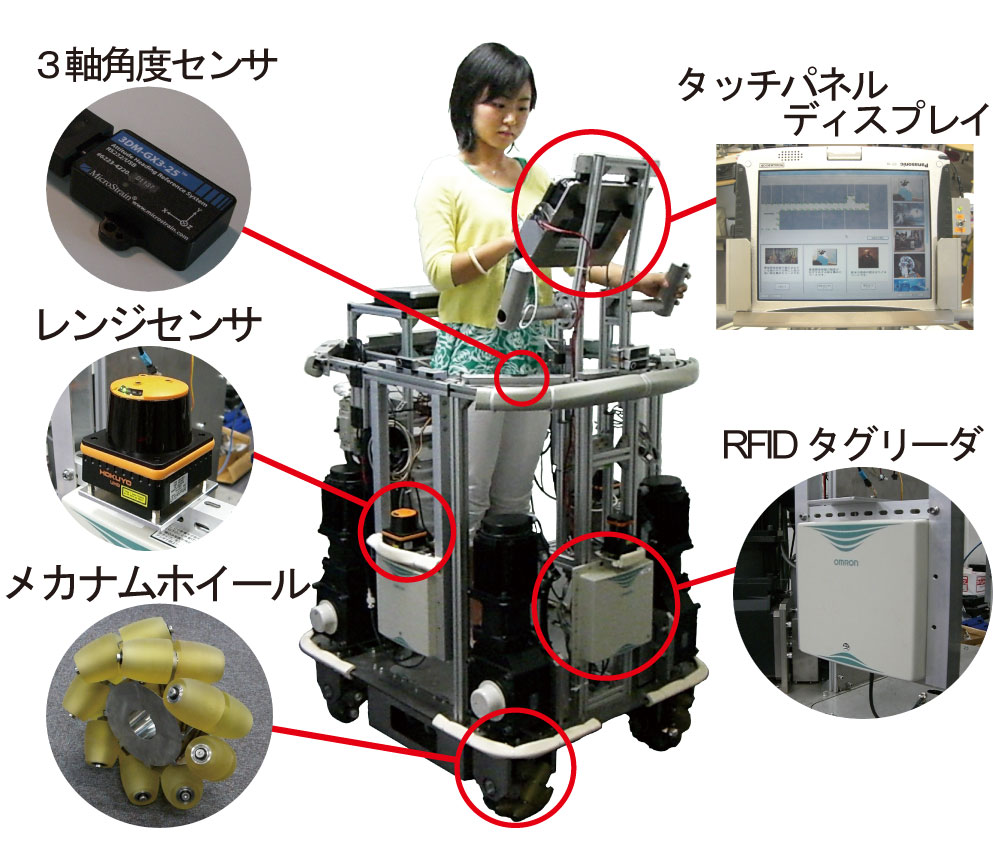
図3.5: 個人用知的移動体AT
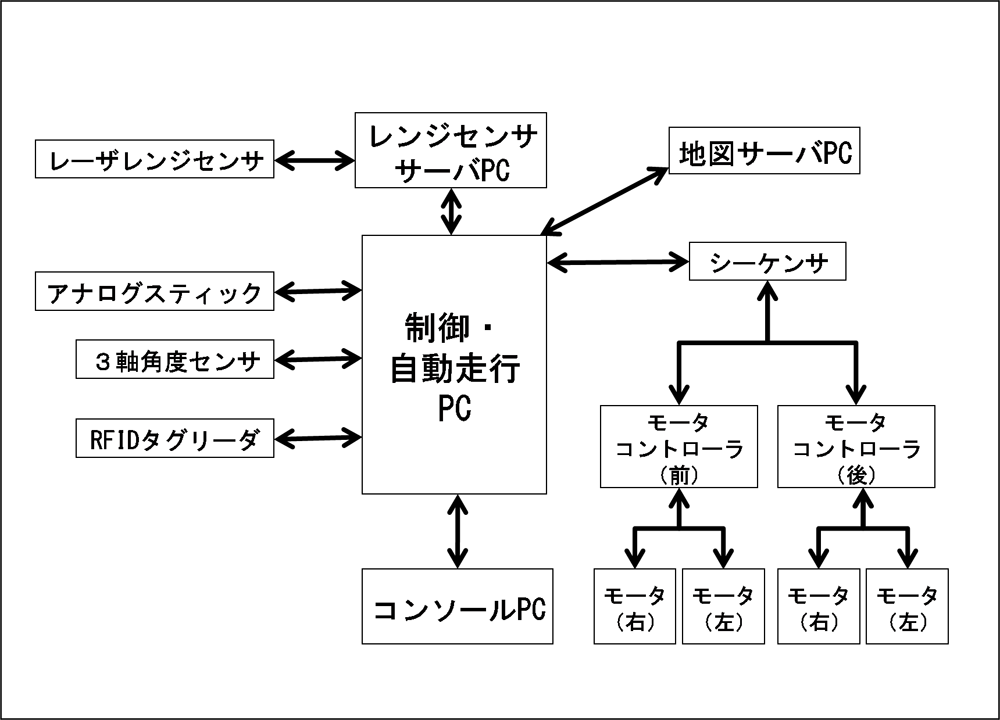
図3.6: システム構成
ATには、4個のメカナムホイールそれぞれとつながっているモータを個別に制御するための、モータ制御系のデバイスが装備されている。 進行方向や速度の入力を制御PCがリモコンから受け取り、まずシーケンサに送る。 シーケンサは受け取った値から、各モータの速度パラメータを計算して求める。その結果を今度はモータコントローラに伝達し、各モータのトルク調節を行うという仕組みになっている。モータコントローラはATに2つ装備されており、一方は前方の左右2つの、 もう一方は後方の左右2つのメカナムホイール用モータの出力トルクを制御している。また、ATの制御には4台のPCが使用されており、その中でモータの制御、センサデバイスの制御、地図に基づく経路・動作の生成などを行っている。ATに搭載されているPCは、制御・自動走行PC、レーザレンジセンササーバPC、コンソールPCで、これらのPCは互いに有線でハブ接続されており、またモータ制御PCとシーケンサも有線によって接続されている。地図サーバは環境に設置されていることを想定しているため、地図サーバPCと制御・自動走行PCは無線によって接続されている。それぞれのPCの役割を以下で詳しく述べる。
-
制御・自動走行PC
モータに繋がるシーケンサなどの制御系デバイスが接続されているPCである。このPCではC#によるモータコントロールサーバが組み込まれており、ここでモータの制御を行っている。また、各PCからのモータ制御の命令はこのPCを介して行われる。他にも、RFIDタグのIDを保持するRFIDサーバも組み込まれており、走行中に読んだタグを、前後左右のそれぞれ10個まで保持することができる。読み取ったタグの情報は、一定時間が経過すると破棄される。これは、最後にタグを読み取ってから時間がたってしまうと、そのタグは位置情報として役に立たないものになるためである。
-
レーザレンジセンササーバPC
C++で実装されたレーザレンジサーバが組み込まれているPCである。レーザレンジサーバはレーザレンジセンサを使用してATの周囲の物体までの距離を常に測定しており、この値を利用して自動走行や、衝突回避が行われている。
-
コンソールPC
搭乗者の手元に置かれたPCであり、タッチパネルが備えられている。このPCのディスプレイに操作用コンソールが表示され、搭乗者はこの画面から目的地を設定することができる。また、C#で実装された自動走行のタスクを実行するプログラムも組み込まれており、自動走行を行う際はこのPCからの命令を元にモータ制御PCがモータに命令を送り走行を行う。
-
地図サーバPC
C#で実装された地図サーバが組み込まれており、さらに、建物内の地図、RFIDタグのIDとその位置座標、および地図上と実世界での距離の比率の情報を格納したデータベースを保持しているPCである。ATからの現在位置・目的地情報と情報取得要求に応じて、現在位置付近の地図や、現在位置から目的地までの経路と動作の生成を行い、生成された経路と動作をATに送信する。さらに、地図サーバは通信可能な範囲に存在するATの位置を常に把握している。v
また、ATは移動体であるため、このように多くのPCやセンサ・デバイスを装備しても、搭乗者である人間に負担をかけることはない。むしろ、できるだけ多くのセンサから獲得した情報に基づいて実世界の状況を認識し、物理的な行動に反映することで、人間の行動をより適切に支援することを目指している。
3.3.2 ネットワーク
前節で、地図サーバは環境側に設置されたサーバで、ATと無線で通信し、より詳細な環境情報を取得していることについて触れた。ここでは、ATの特徴の1つであるネットワークの基本システムについて述べる。ATにおけるネットワーク構成図を図に示す。
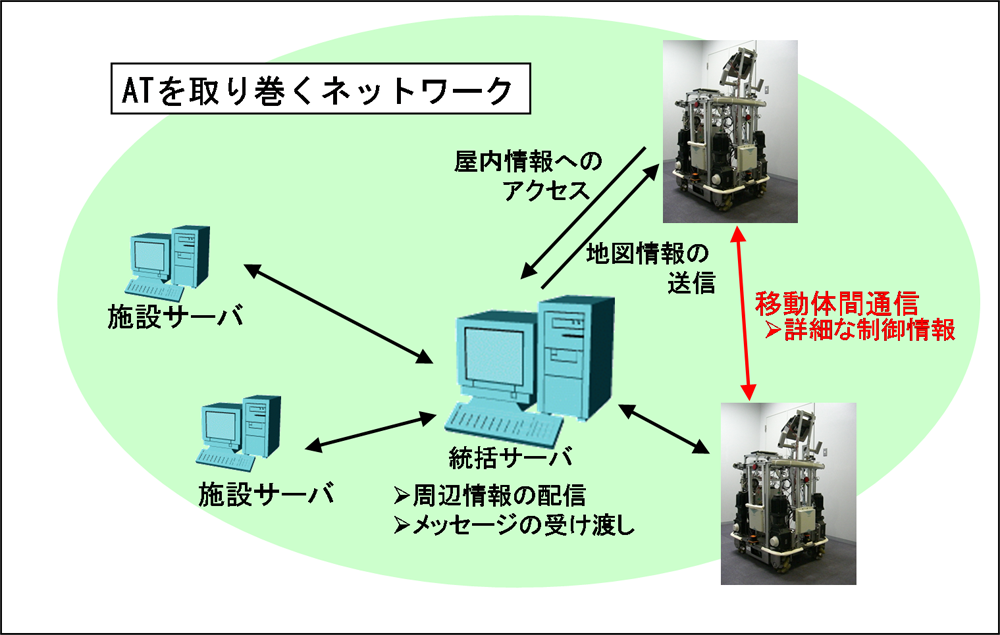
図3.7: ATにおけるネットワーク構成図
ATを取り巻くネットワークでは、周囲の情報を配信するサーバの存在が前提となっている。このサーバは、ある特定の地域を統括するような形での存在を想定しており、AT間通信の基盤を提供するとともに、サーバクライアント型のアプリケーションを提供する。統括サーバ以外には、例えば美術館や病院のような施設単位で、情報を配信するサーバが複数存在している。
ATにログインすると、統括サーバとのコネクションが確立され、情報配信を受けることができるようになる。統括サーバは、コネクションを確立しているATや、施設サーバの情報を収集し、配信するATの位置情報を考慮したうえでリストを作成し、配信する。この仕組みにより、近くにいるATの情報や施設の情報を容易に取得することが可能である。もちろん、他のATに対してメッセージを送信したり、複数のATに対して情報をブロードキャストすることもできるようになっている。
また、ATは個体間通信によってAT同士や搭乗者同士の情報交換を行うことができる。例えば、AT同士の連携動作に関する制御情報や搭乗者間におけるメッセージのやりとりなどである。個体間通信では、目的や通信対象との距離に応じて、サーバを介した無線LAN通信、無線アドホック通信、PSD-IRアレイによる赤外線通信が自動的に切り替わり、状況に応じて使い分けられる。遠隔にあるATと情報交換を行う場合は、サーバを介した通信が適している。それに対して、AT同士の衝突回避などの即時性を求められる場面では、暗黙のうちにAT間のコネクションに切り替わることで対応する。
3.3.3 操縦インタフェース
ATを操縦するときは手元のコントローラを倒したりボタンを押したりする。ATの稼働状態を監視するためのコンソールと、コントローラを図に示す。
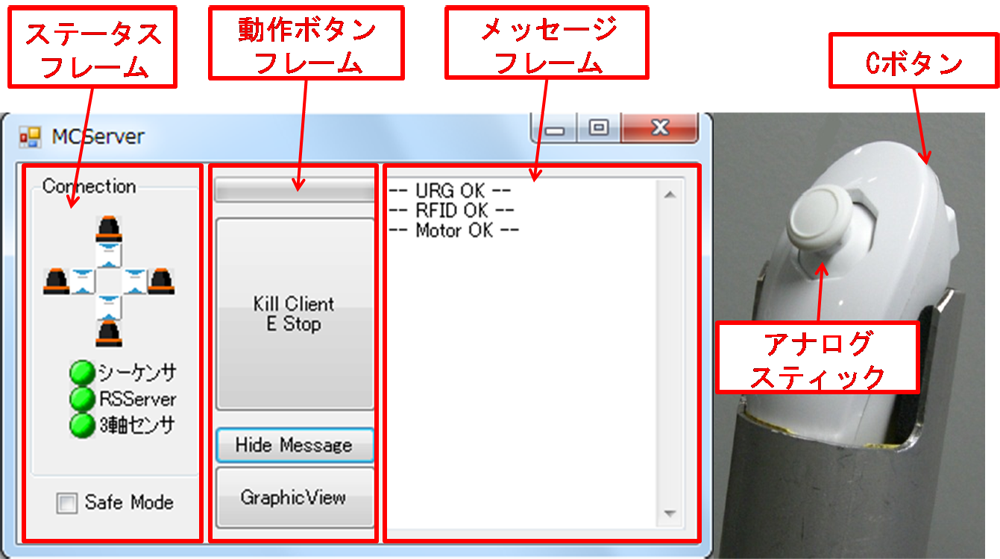
図3.8: コンソール画面とコントローラ
手動走行を行うコントローラには、図右側のアナログスティックを使用する。アナログスティックを倒す角度と傾きから、移動角度と移動速度を決定して走行し、スティックを元に戻すと停止する。また、Cボタンを押しながらアナログスティックを倒すことによってその場回転を行うことができる。また、コントローラは有線で、モータ制御PCとUSBケーブルで接続されている。このコントローラは、ATに接続したまま使うことも、手にとって使うことも可能である。
また図の左側は、ATのタッチパネルディスプレイに表示されるATの稼働状態を監視するコンソール画面である。ATに搭載された各PCとの通信状況や、各センサとの接続状態が表示されている。コンソール画面はステータスフレーム、動作ボタンフレーム、およびメッセージフレームの3つのフレームで構成されている。それぞれのフレームの役割を以下に示す。
-
ステータスフレーム
各センサやシーケンサとの接続状態が表示されている。RFIDタグリーダやレーザレンジセンサは4方向それぞれに設置されているため、どの方向と接続がされているか分かるようになっている。接続状態を視覚的に確認することができることにより、機器の故障や接触不良などの異常を即座に発見できるため、機器のトラブルによる誤作動を防止することができる。
-
動作ボタンフレーム
緊急停止、メッセージフレームの表示/非表示、およびセンサの詳細情報の表示を行うためのボタンがある。フレーム下方のセンサの詳細情報のボタンを押すと、図に示す、レーザレンジセンサが取得した360度の距離情報、RFIDタグリーダが読み取ったタグの番号、および3軸センサで計算した車体の回転角の情報が視覚的に分かりやすく表示される。
-
センサやPCとの接続や、モードの切り替えの際にメッセージが表示される。
メッセージフレーム
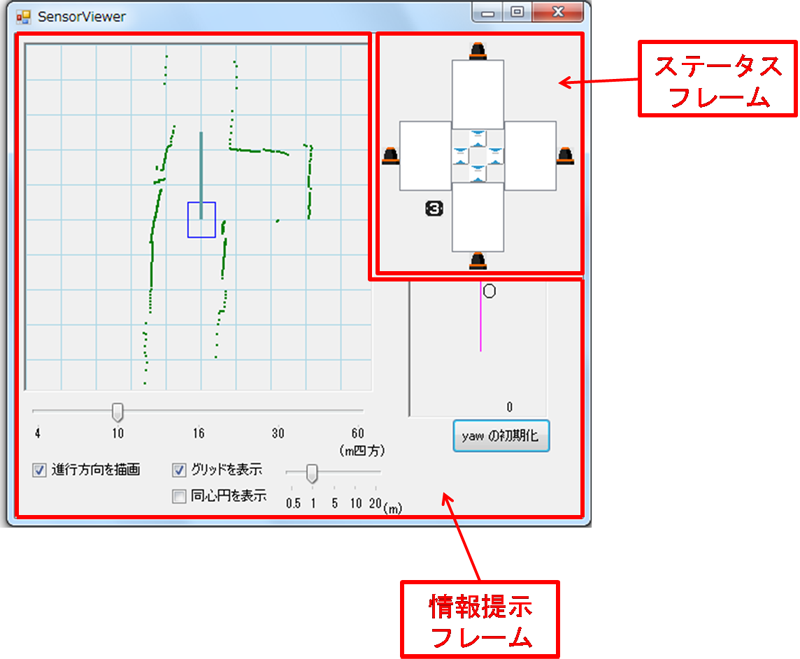
図3.9: 各センサの詳細情報
3.4 屋内自動トランスポーテーション
本研究の背景に、ATを用いて搭乗者である人間を目的地まで自動的に移動させるという、屋内自動トランスポーテーションがある。屋内自動トランスポーテーションは、搭乗者がAT上で目的地を設定するとその目的地まで安全に自動走行し、その走行途中において搭乗者の状況や要求に応じた施設内の様々な場所や対象物に関する情報、あるいは目的地に関する詳細情報を搭乗者に対して提示するものである。またこの仕組みは、美術館や博物館、さらには総合病院や空港のような大規模屋内施設での利用を想定している。
屋内で目的地を目指して移動する人にとって本来の目的とは、目的とする場所で何かをすることであって、移動そのものではない。それゆえ、人々は移動する際のコストや危険性を可能な限り低くしたいと考える。しかし、位置固定のフロアマップによる道案内では、まずそれらのマップを探し当て、さらにそこから空間把握能力を駆使して移動する必要がある。また、近年開発が進む携帯情報端末を利用した屋内道案内も、機器ごとの複雑な操作を覚える必要がある。それ以外にも、携帯情報端末を操作して情報を取得しながら移動することは、情報端末に気を取られて身近に迫る危険や情報を見落とす可能性があるため、非常に危険であると考えられる。このような課題を解決するだけでなく、屋内自動トランスポーテーションは搭乗者が移動中に、移動とは直接関係のない作業をすることを可能にする。そのため、素早く、安全に、そして楽に目的地へ移動したい人々にとって、有効な仕組みである。
屋内自動トランスポーテーションの基盤となる機能が、目的地までの自動走行である。現在、屋内自動トランスポーテーションを実現している乗り物に動く歩道やエスカレータ、工場内で物を自動運搬する移動体やテーマパークのアトラクション内で 稼働する移動体などがある。しかしこれらの乗り物は、「設置されたレールの上を移動体が動く」という考え方で作られているため、任意の目的地や経路を設定することができない。物ではなく、人間が搭乗する個人用の移動体であることを考慮すると、個人の意志に応じて自動走行する開始位置と目的地を自由に決定できる仕組みが望まれる。そこで、我々は「周囲の状況を把握しながら自律的に動くよう移動体を賢くする」という考え方に基づき、 床や天井に移動を補助するレールを設置することなく、搭乗者や周囲の状況に柔軟に対応する自動走行を実現した。環境設置型のガイドなしに自動走行を実現する手法として、車輪の回転速度により移動体の自己位置を推定する方法がある。しかし、この手法は走行距離に伴って増加する推定誤差が無視できない。そこで本手法では、屋内を壁との距離を一定に保って走行する壁沿い走行をすることで地図との対応を取りやすくし、さらに壁に設置したRFIDタグを推定位置補正のためのランドマークとした。以下では、まずATを用いて構築した屋内自動トランスポーテーションのシステム全体の構成について述べ、次に自動走行の基本となるRFIDタグを読み取りながらの壁沿い走行について述べる。その後に、自動走行を行うために必要な地図情報と、その地図情報を用いてどのように自動走行を実現したのかについて詳しく説明する。
3.4.1 地図情報に基づく屋内自動トランスポーテーション
先に記した屋内地図情報は、AT自身が常に保持しているのではなく、「地図サーバ」と呼ばれる建物ごとに用意されたサーバが管理している。 ATは建物の入口を通過する時に、その建物の地図サーバと接続し通信を開始する。それ以降建物内にいる間ATは、常に地図サーバと通信可能な状態を維持し続けるが、ATが建物から外へ出たならばその接続を切断する。また、地図サーバは建物内にいるすべてのATと通信し、全ATの動きを把握することが可能である。各ATと地図サーバの通信形態は図に示す通りである。地図サーバは、主にそのサーバが置かれている建物の地図データが格納されたデータベースと、経路や動作を生成するプログラムから成る。建物が美術館であり、本研究で構築するシステムを用いる場合、美術館の地図サーバは上記以外にも別のデータベースやプログラムを構成する要素として持つ。これについては、4章4.2節で詳しく説明する。
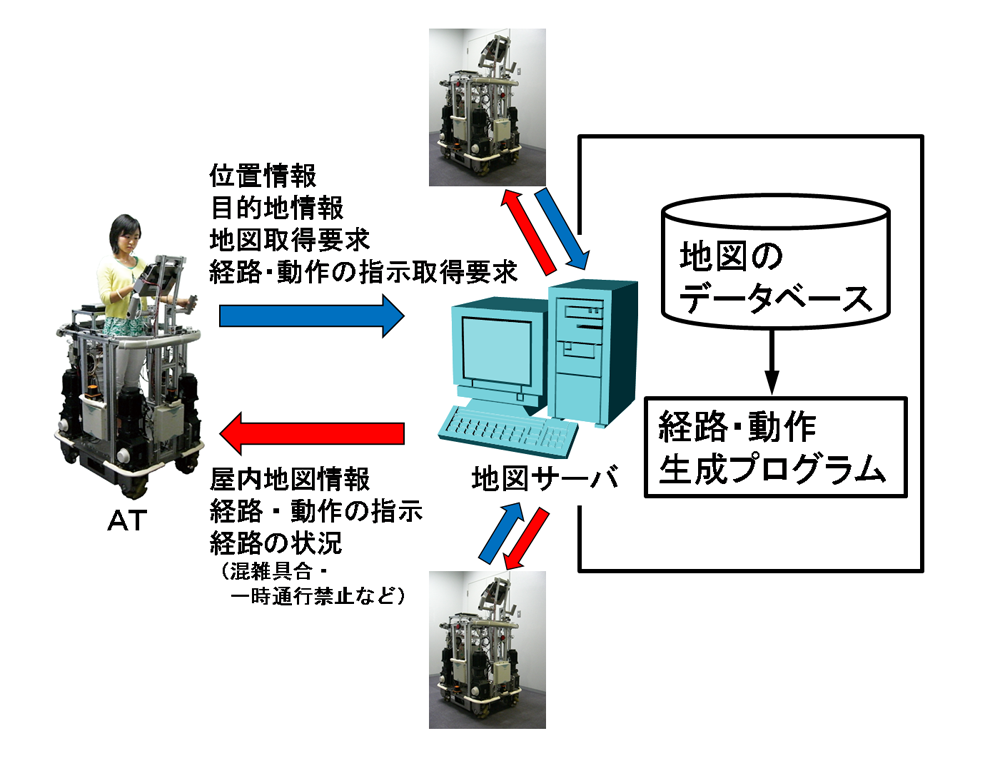
図3.10: ATが保持する地図
ATは定期的に地図サーバに自身の位置情報を送信し、必要な時に周辺地図情報の取得要求を送信する。搭乗者が目的地を設定した場合は、目的地の位置情報と目的地までの経路・動作情報の取得要求を送信する。地図サーバは、各ATからの要求に応じて地図情報や経路・動作情報を送信する。それ以外にも、各ATの現在位置に応じて、周辺の混雑状況や一時通行禁止場所情報などの経路情報を、定期的に送信する。
建物内の全ATの動きを地図サーバが把握することによって、ATで混雑している通路とそうでない通路を判断することができる。また、近い将来混雑するであろう通路を予測することもできる。それゆえ、多くのATが同じ通路に集まらないよう事前に各ATに通知を行うことが可能である。さらに、物が置かれて一部の通路が通行不可になったとしても、サーバの情報を変更するだけで、すべてのATがその通路を通らないようにすることができる。現在世の中に広く普及しているカーナビゲーションシステムは、環境情報を管理するサーバとのリアルタイムな通信ができないため、渋滞の発生や道路工事中といった動的な情報を瞬時に取得することができない。屋内では屋外に比べ通路が狭いので混雑が起きやすく、通路に何かが置かれて通れなくなることも多いため、時間と共に変化する動的な情報の取得が重要となる。
複数のATが同じ場所に集まらないようにすることは、AT同士の衝突を防止することに繋がると考えられる。これまでに研究されたAT同士の衝突回避方法は、制動距離範囲内に複数のATが近づいた場合にAT間で通信して速度制限や動作停止などの回避動作を行い、双方の搭乗者に衝突の危険性があることを通知するという方法であった。ATが自動で走行しているため、AT同士が近づいてから衝突回避を行うのではなく、将来すれ違うであろうATも予測して事前に速度や経路を調整するといったより広い範囲の視野で衝突回避を行うことが望まれる。地図サーバが全ATの動きを管理すれば、このようなATならではの衝突回避が可能である。
3.4.2 壁沿い走行とRFIDタグによる位置認識
現在位置情報を知るシステムとして最も一般的なのものがGPS (Global Positioning System)である。しかし、GPS衛星から発信される電波は、建物などにぶつかって屈折・反射するため建物の中での位置測定は困難である。屋内での位置測定手法としては、無線LANを用いた方法があるが、壁や家具など障害物が多い屋内環境で、電波は屋外の場合以上に屈折・反射をしてしまう。さらに、屋内では様々な電磁波が飛び交うため電波はそれらと干渉し合うことも多く、無線LANによる正確な位置測定は困難を極める。他の屋内位置測定手法に、超音波センサを用いた方法もあるが、この方法では超音波を受け取る受信機を環境側に数多く設置する必要があるため非常にコストがかかる。
地図が与えられていても自分の位置が正確にはわからないATは、真っ暗で何も見えない建物の中を照明を使わずに歩く我々と同じである。その場合我々は、進む道がどのような状態になっていて、どのような危険が待ち構えているのかわからないため、まず自分の 周りに何かないか腕を広げて探ってみるだろう。そして、もし壁らしきものが見つかったらそれを手で触りながら、壁に沿って注意深く進んでいく。この方法が何も見えない中での最も安全な移動方法であると考えるためである。ATにとっても同じで、自身の位置が把握できない場合、壁に沿って進むことで地図との対応が取りやすくなるのである。しかし、壁に沿って進んでいても何かランドマークがないとATは自分が地図上のどの辺りの壁付近にいるのかわからない。また、自身の目的としている場所の位置もわからないままである。
そこで、最大距離30m、270度(センサ正面から左右に135度)の範囲で、物体までの距離を測定可能なレーザレンジセンサ4個をATの前後左右に装備し、壁との距離を常に一定に保ちながら走行する壁沿い走行を実装した。建物内に移動体や人間が大勢存在する状況を想定すると、移動体が壁沿いを走行することで、歩行している人間や他の移動体と衝突したり交差したりする確率を軽減することができると考えられる。また、位置認識のランドマークとなるものとして軽量で電源を必要としないRFIDタグを壁に設置し、タグを読み取ることでATが地図上での自身の大体の位置を知ることを可能にした。
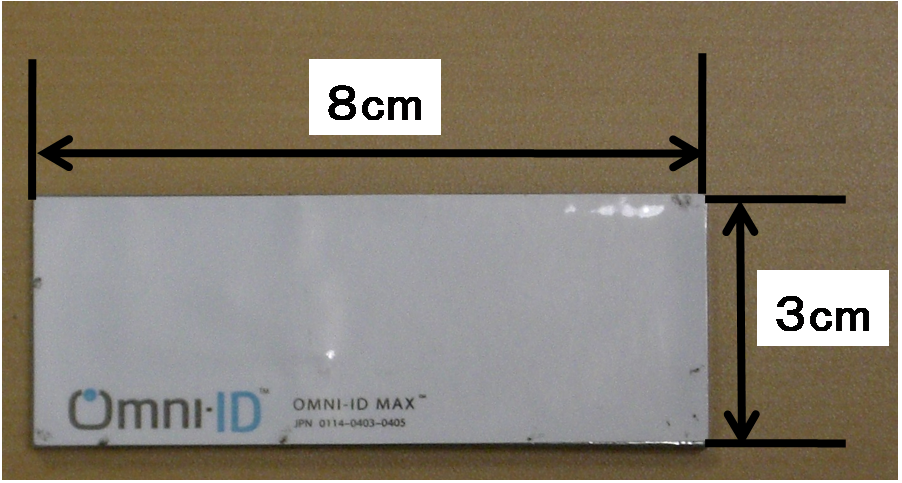
図3.11: RFIDタグ
今回使用したRFIDタグを図に示す。RFIDタグは縦3cm、横8cmの長方形の薄いプラスチック板のような形状・質感をしている。非常に計量で電源を必要としないため、壁沿い走行中の位置把握を目的として壁にいくつか設置しても環境側にかかるコストは低い。また、壁沿い走行する際のランドマークとなるRFIDタグは壁に設置されていることが望ましいため、RFIDタグは基本的に建物内の壁に設置する。それゆえ、そのタグを読み取るためのタグリーダは壁の方向を向いている必要がある。そこで、ATの左右前後に計4つのタグリーダを図のようにATに装備した。RFIDタグリーダの読み取り可能範囲は可変であるが、ここでは最小範囲にした。それは、読み取り可能範囲が広いと、複数のタグを一度に読み取ってしまい、正確な位置認識が行えなくなるためである。4方向に取り付けられたタグリーダの読み取り可能範囲は全て等しく設定し、壁に設置されたタグの高さと同程度の高さでATに対して取り付けた。また、全てのタグリーダはそれぞれ固有のIDをもっており、どのリーダがどのIDをもつタグを読み取ったのかを判別することが可能である。
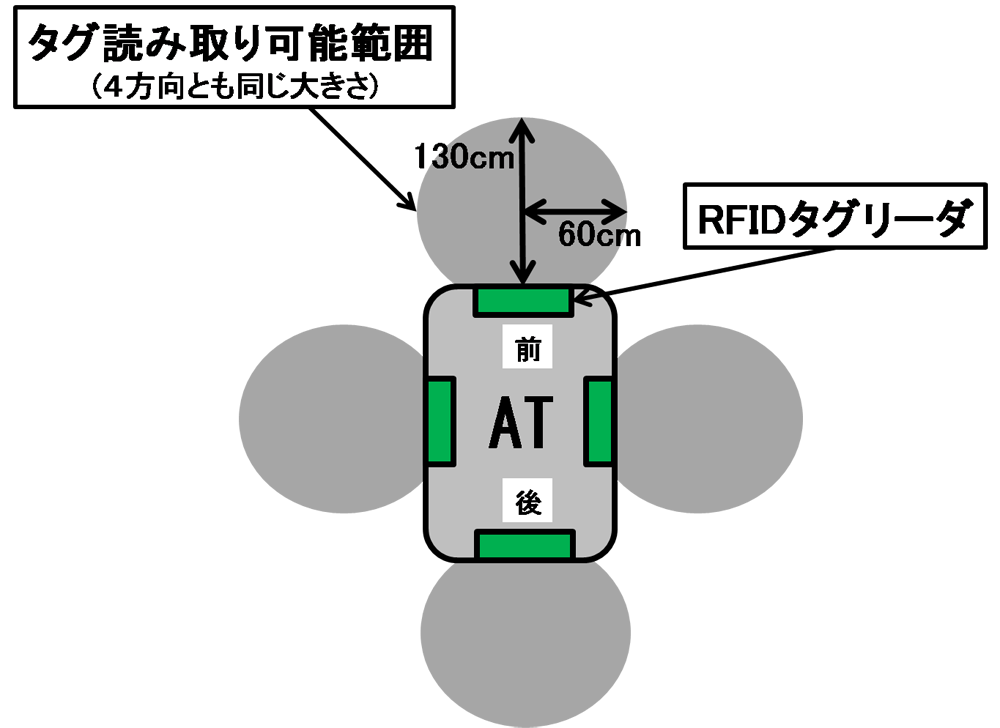
図3.12: RFIDタグリーダ配置と読み取り可能範囲
3.4.3 地図情報
ATが自動走行の際に用いる地図の例を図に示す。またATに与える地図情報は以下の2つである。
-
施設内の各部屋や階段等、ATが進入不可能な領域の位置
-
ランドマークとなるRFIDタグのID・位置と属性
地図作成時は領域の頂点座標とタグの位置座標・属性をデータベースに登録する。その際、位置認識の精度向上やタグの座標の機械的な入力を考慮してRFIDタグは一定間隔で設置するようにした。RFIDタグは軽量かつ電源を必要としないので設置に関するコストは低いと考えられる。
またRFIDタグは、そのタグの付近の壁に存在する搭乗者にとって有用な情報の有無を示す属性を有する。有用な情報とは、例として美術館を挙げると展示作品のことである。壁に有用な情報がある場合、搭乗者は壁側を向きながら走行する。これは美術館や博物館での利用を想定したもので、単に位置情報だけを示すタグと、位置情報と展示作品の両方を示すタグを区別する。
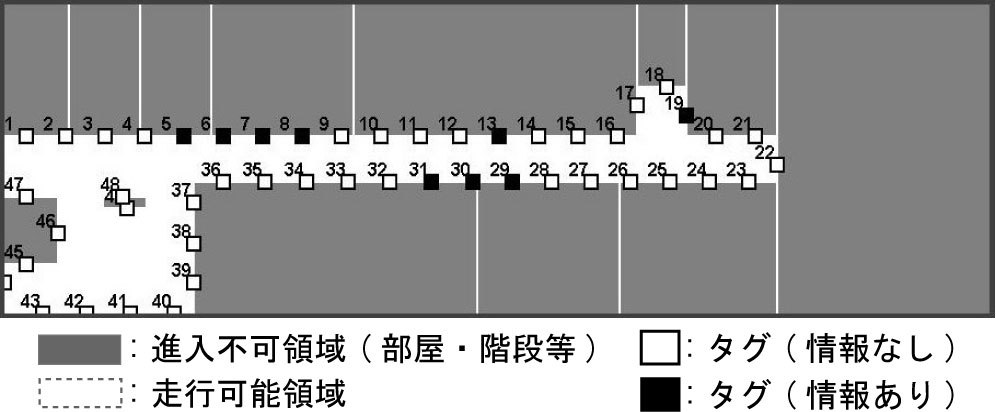
図3.13: ATが保持する地図
3.4.4 経路生成と動作プランニング
自動走行を開始すると、まずATは近くの壁に接近して現在位置のランドマークとなるRFIDタグを読み取り、自身の現在位置を地図サーバに送信し、経路・動作情報の取得要求を行う。この取得要求を受けて現在位置を受信した地図サーバは、現在位置を示すタグから目的地を示すタグまでの経路を計算する。経路とは、目的地まで走行する途中で通過すべきRFIDタグのIDを通過すべき順に並べたものである。具体的な経路生成方法は、以下に示す手順で行われる。可能な限り距離を短く、そして壁沿いを走行する経路になるようにパラメータを決定する。
-
1.全タグ間の距離と動作方法を保持するデータベースを生成する(最初の1回のみ)
タグ間を最短距離で結んだ直線上に侵入不可領域が重ならない場合は、最短距離がタグ間の距離となる。一方、タグ間を最短距離で結んだ直線上に侵入不可領域が重なる場合は、一方のタグの座標と、重なる侵入不可領域の頂点座標ともう一方のタグの座標をダイクストラ法によって結んだ最短距離がタグ間の距離となる。タグ間の動作方法は、2つのタグの位置関係、あるいは2つのタグと侵入不可領域の位置関係から算出する。ここでの動作は、図に示す6種類のタグ間基本動作のうちの1つを指す。
-
2.現在位置タグから目的地タグまで走行する場合に通過するタグ順を決定する
1.で生成したデータベースに格納されたタグ間の距離を用い、ダイクストラ法によって最短距離で目的地タグに到達するときのタグ順を決定する。図の2のような交差点を右左折する動作や、5のような壁から離れる動作は、壁沿いを走行する動作より複雑で、動作時間が長く、不安定である。そのため、多少距離が長くても、壁沿いを長距離走行する経路の方が、早く安定して走行できる場合がある。ゆえに、距離と時間や安定性のバランスを適切に保持した経路を生成しなければならない。ここでの距離は、純粋なタグ間距離に対して動作によって重み付けされた距離としたが、重み付けを行う際のパラメータは実験的に決定する必要がある。
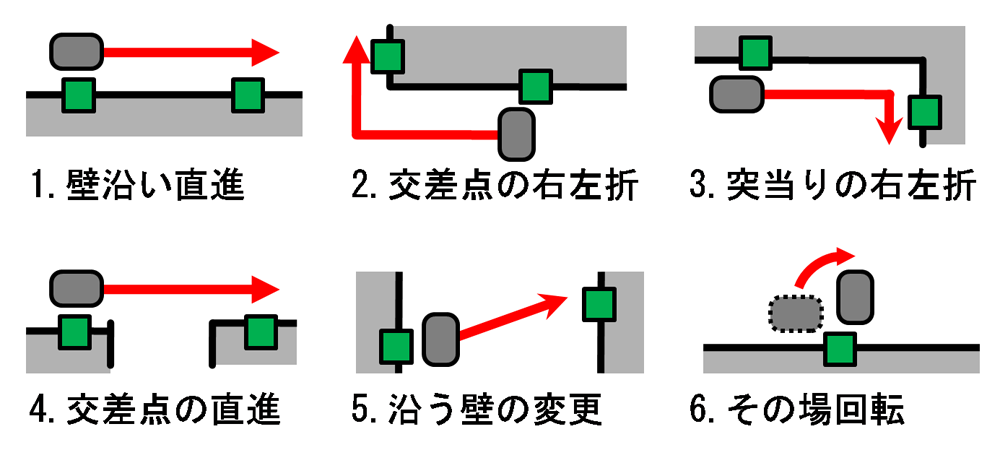
図3.14: 6種類のタグ間基本動作
経路決定後、動作プランを決定する。動作プランとは図に示す6つの各タグ間の基本動作を組み合わせたものであるが、隣接するタグ間の基本動作は地図情報から算出可能で、これらと経路を組み合わせることにより自動生成される。図の1?5の5つの基本動作にはそれぞれ進行方向があり、それらをつなぐための動作として6番目の「その場回転」動作を含む。ゆえに、右左折時あるいはタグの属性や開始位置における向きによって、「その場回転」動作をプランの適切な位置に加えるプランニングを行う。
プランニングの例を図に示す。図は地図サーバのコンソール画面であり、ATの現在位置は図に示したアイコンで表示される。図のように自動走行の開始位置と目的地を設定し、図に示したアイコンの向きで走行を開始した場合、まず突当り左折動作を行い、直後に交差点右折動作を行う。次に、壁沿い走行の手掛かりとする壁を変更する。その後は、壁沿いを直進し、次の交差点で左折する際は左折後のことを考慮し、その場回転動作で向きを変更する。最後に突当りを右折して、壁沿いを走行し目的地に到着するというプランニングが行われる。
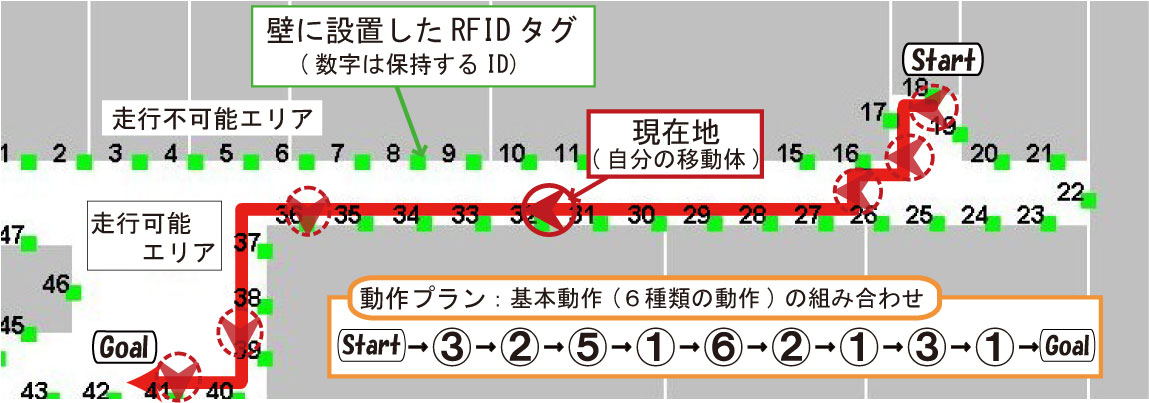
図3.15: 動作プランニング
3.4.5 走行タスクの生成
走行タスクとは、表3に示すATのモータを制御する5種類のプロセスを組み合わせたものを意味し、動作プラン中の図に示す各基本動作は、これらのプロセスを組み合わせることにより実現される。地図サーバから受信した、現在位置から目的地までの動作プランのデータを、ATは走行タスクに変換する。また、各プロセスの具体的な動作内容についても以下で詳しく説明する。
-
ApproachWall
ATは、RFIDタグを読み取るためと、壁との距離を計測して自身の位置を把握するために壁に接近しなければならない。そのために壁に接近する機能が必要である。接近したい壁の存在する角度の範囲と、その壁までどれだけ近づくかを指定すると、ATはその指定した壁からの距離まで移動し、その距離まで到達したときに停止する。指定した距離よりも壁から離れていた場合は壁に接近し、指定した距離よりも近い場合は壁から離れる。
-
ParallelToWall
ATは、壁沿い走行を実現するために、壁と平行にならなければならない。ATが走行時に必ずまっすぐ進むという保証はなく、走行している間に進行方向が変わってしまうことがある。そのために壁と平行になる機能が必要である。先に紹介したApproachWallと共に使用することで、ATは走行中に壁を手掛かりにして壁から一定距離を保ち、かつ壁と平行になり、まっすぐ走行することができるようになる。対象となる壁の存在する角度の範囲と、ATのどの面をその壁と平行にしたいかを指定すると、ATはその場回転を行い、指定した面を指定した壁に向けようとする。指定したATの面と指定した向きに存在する壁が平行になったときに停止する。
-
MoveWithTag
自動走行をする際、ATは地図上の自身の位置を把握しなければならない。自身の位置を把握していないと現在走行している位置が分からず、目的地まで到達することができないからである。我々は、ATが自身の現在位置を把握するために、建物内の壁にRFIDタグを設置している。ATがRFIDタグを読み取ることによって、目的地までの経路の作成や、交差点右左折などのきっかけを見つけることができる。まず走行開始コマンドをモータコントローラサーバに送り、走行開始した後は、停止タグに設定したRFIDタグを読み取るか、ATが進行方向にある壁に近づいて停止するまで走行を続ける。壁沿い走行中は、壁に近づきすぎず、離れすぎず走行しなければならない。そのため、ループ処理によって、一定時間ごとに壁と平行になるコマンド、及び壁と一定の距離をとるコマンドを送っている。この手法により、壁との距離を一定(本研究では、経験的に50cmとする)に保持したまま壁と平行に移動することが実現できる。目的地として設定されたRFIDタグを読んだときは、ループを終了して、呼び出し元に戻り、次のプロセスを実行する。
-
MoveWithDistance
交差点では、自動走行中の自身の位置を、タグの存在しない場所で把握しなければならない。交差点の右折を例にとると、交差点に差し掛かった後、右折ができるようになるまで交差点に入ったか、つまり、ATの右にあった壁が無くなったかどうかの情報が必要になる。MoveWithTagと似ているが、こちらのプロセスでは終了条件がRFIDタグの読み取りではなく、指定方向の距離が一定値以上または一定値以下になったかどうかである。一定値以上か一定値以下かの選択は、コマンドを送るときの引数によって決定される。
-
Turn
このプロセスは、ParallelToWallと同じようにATをその場回転させる機能であるが、異なる点は、壁を基準にしないという点である。数値を指定することによってその角度だけATが回転し、指定した角度だけ回転したら停止する。
各基本動作に対するプロセスの組み合わせは決まっているため、走行タスクは動作プランから一意に決定可能である。ATによる自動走行は、このプロセス群をシーケンシャルに処理していくことで実現できる。
3.4.6 複雑な環境下での屋内自動トランスポーテーショ
美術館等での実用化を想定する環境で適応可能な屋内自動トランスポーテーションにするためには、地図上にない障害物や人間が存在する環境でも安全な自動走行が可能でなければならない。また、ATは自律移動ロボットとは異なり人間を乗せて走行する移動体であるため、自動走行中における搭乗者の経路変更や手動操作の要求を許容できるような柔軟性を持ち合わせている必要がある。ゆえに、自動走行中の状況が変化してもATがそれを認識した上で行動を変化させられるような仕組みを構築した。
走行中、進行方向に静止障害物が存在したり、近くに人間が存在したりする場合は、壁沿い走行を継続するより、目の前の障害物を回避することの方が優先となる。その場合に壁沿い走行を中断し、移動体の周囲の状況を把握するためのレーザレンジセンサを駆使して障害物や人間を巧みに回避する制御方法に切り替える。ただし、回避中もランドマークによる現在位置認識を継続し、周囲に障害物や人間が存在しなくなったときに現在位置から当初の目的地までの経路・動作プランを再計算して壁沿い走行を再開する。
美術館や博物館などにおいて、目的地を設定する段階で決定した展示物だけがその搭乗者の興味の対象とは限らない。当然、走行途中で偶然目にしたものに興味を抱くことがある。それゆえ、走行した経路周辺にあった展示物の情報を提示し、搭乗者が再度見たい展示物があれば自動走行中であっても一旦停止して、その展示物の場所まで経路を変更して戻ることを可能にする。
また、壁沿い走行途中に搭乗者がアナログスティックを操作し運転を開始した場合にも、再度搭乗者が自動走行を開始するまで壁沿い走行は中断する。搭乗者の手動操作により停止した位置と再開位置に大幅なずれが生じても、ランドマークによる位置認識と走行経路の再プランニングにより対応できる。
本章では、我々が開発する個人用知的移動体について詳しく述べ、それを用いた屋内自動トランスポーテーションの実現方法を説明した。本研究では、この屋内自動トランスポーテーションを拡張し、美術館において利用者の鑑賞体験を豊かにするシステムの構築を行った。次章で、その具体的な実現方法や、システムの有用性について詳しく述べる。
4 鑑賞体験記録に基づく鑑賞体験の個人化
本研究では、自動走行可能な個人用の移動体ATを用い、ATに搭乗して美術館内を利用者個人に適したコースに従って巡ることで、制限された時間の中で過去の鑑賞体験に基づいた、効果的な展示作品の鑑賞を行うことを支援するシステムを構築した。構築において、システムの利用者にかける負担を最小限にすることを目指し、利用者の自然な動作や操作から暗黙的にシステムが推定可能な利用者の意図を最大限に活用する仕組みを心がけた。本章では、鑑賞体験の記録とその獲得方法について詳しく述べた後、本システムの概要と構成、ユーザインタフェースについて説明する。最後に、本システムの有効性を確認するために行った評価実験について結果と考察を述べる。
4.1 個人の鑑賞体験記録
2章2.2節で述べたように、美術鑑賞の初心者が豊かな鑑賞体験をするための効果的な方法は、過去に鑑賞して頭の中に記憶されている作品の中から目の前の作品と関係のある作品を選出し、作品同士を比較することである。そうすることで新しく出会った作品に対して理解を深めることができる。この方法で初心者の鑑賞体験を支援するシステムには、システムの利用者1人1人が頭の中に記憶している作品を把握し、蓄積する機能が必要不可欠である。
そこで本研究では、美術館でのシステムを利用した鑑賞体験時に、利用者の頭の中に記憶として残ったであろう作品を「個人の鑑賞体験記録」として残す。「個人の鑑賞体験記録」は美術館の展示作品それぞれに対する利用者の鑑賞時間に基づいて作成される。長時間鑑賞した作品は記憶に残りやすいという仮説から、鑑賞時間が長かった作品を利用者の記憶に残った作品と評価し、記録として蓄積する。すなわち、鑑賞体験記録とは、利用者がこれまでに訪れた美術館で長時間鑑賞した作品の履歴である。以下ではまず、鑑賞体験記録として残す、利用者が長時間鑑賞した作品の獲得方法について詳しく説明する。次に、長時間鑑賞した作品は記憶に残りやすいという仮説の検証、および鑑賞時間のさらなる応用の可能性について述べる。
4.1.1 鑑賞体験記録の獲得
本システムでは、個人の鑑賞体験記録を各作品に対する利用者の鑑賞時間に基づいて作成する。ゆえに、鑑賞体験記録を取得するためには、利用者のいる位置と目の前にある作品を判別し、さらにその作品を利用者が鑑賞している時間を計測する必要がある。移動体に搭乗して展示作品を鑑賞する本システムでは、移動体が作品の前で停止していて、かつ搭乗者がその作品の方向を見ている時間を鑑賞時間とする。作品の判別は、各作品の下方に設置されたRFIDタグを移動体が読み取ることで行い、搭乗者の頭の向きは、鑑賞の際に音声解説を聞くために搭乗者が装着するヘッドフォンの頂点に搭載した小型で軽量の3軸角度センサにより取得する。ヘッドフォン及び3軸角度センサの装着の様子を図に示す。

図4.1: 搭乗者が装着するヘッドフォンと3軸角度センサ
現在、実際の美術館で利用されている音声ガイドや開発が進む小型の情報端末を用いた場合は、利用者の各作品に対する鑑賞時間を暗黙的に取得することができない。鑑賞している作品を端末に判別させるために、利用者が作品に割り振られたID番号を入力したり、端末に附属のスキャナでバーコードを読み取らせたりしなければならないし、鑑賞時間の計測においても利用者自身が、鑑賞開始時と終了時にその合図として開始・終了のボタンを押さなければならない。作品に関する解説を聞くためにボタンを押したり、スキャナをかざしたりという操作を利用者にさせることは、「解説を聞きたい」という利用者の意図を取得することにおいて有効であると考えられる。しかし、その操作によって鑑賞作品の判別はできても、鑑賞時間を取得することはできない。鑑賞時間は解説を聞いている時間と必ずしも等価ではなく、美術鑑賞においては解説を聞く前や聞いた後に作品を見ながら頭を働かせ、想像を膨らませることが重要な鑑賞時間であると言える。正確な鑑賞時間を取得するために、利用者に鑑賞開始と終了の合図を明示的に入力させることは、利用者に対する負担であり、美術鑑賞への集中を阻害する原因となり得る。
この問題を解決するための1つの手法として、本研究では自動走行可能な移動体に搭乗して美術館を巡ることを提案した。自動走行する移動体の位置認識手法により、利用者が鑑賞している作品を暗黙的に判別することができるだけでなく、作品の前で停止してから利用者が「次の作品へ行きたい」と思い自動走行を再開させるまでの移動体の停止時間から、鑑賞時間をも暗黙的に取得できる。さらに、利用者が鑑賞中に装着するヘッドフォンに搭載した3軸角度センサで利用者の頭の向きを取得することにより、移動体が停止中に作品を見ないで鑑賞以外のことを行っている時間を検出することが可能である。以上のことから、本システムでは、従来の小型の端末を用いる場合よりも利用者にかける負担を軽減する暗黙的な方法で、利用者が鑑賞している作品の判別と、その正確な鑑賞時間を取得することを実現した。
これまでは利用者の展示作品に対する暗黙的な鑑賞時間の取得方法について述べた。ここでは、取得した鑑賞時間により生成される鑑賞体験記録について述べる。本研究における鑑賞体験記録とは、利用者が過去に訪れた美術館で鑑賞したことを覚えている作品の蓄積である。ゆえに、長時間鑑賞した作品は記憶に残りやすいという仮説に基づき、本システムでは鑑賞時間が長かった作品を利用者の記憶に残った作品として蓄積する。この時に鑑賞時間の長さを判定する基準が必要となる。この基準を定数とした場合、記憶に残ったか残らなかったかを適切に評価できないと考えている。なぜなら、美術鑑賞に費やす時間や鑑賞方法には個人差があり、異なる2人が同じ時間だけ同じ作品を鑑賞したとしても、鑑賞に費やす平均時間が異なれば2人とも記憶に残っている、あるいは残っていないと判定することはできないためである。
そこで本システムでは、鑑賞方法の個人差を考慮して、各作品の平均鑑賞時間から、個人の鑑賞時間のばらつき度合いを示す標準偏差の時間を引いた値を、鑑賞時間の長さを判定する基準とした。すなわち、利用者の展示作品
への鑑賞時間
と、利用者
が美術館で鑑賞を開始してから終了するまでに、移動体が停止した状態で鑑賞した作品の総数
、各作品に対する平均鑑賞時間
より利用者
の鑑賞時間の判定基準値
は以下の式で求める。そして、利用者
の記憶の中に展示作品
が残ったかどうかを表す
は、以下の式で表されるように真偽で判定する。鑑賞時間がこの基準値
以上の作品は記憶に残った作品(true)、基準値
未満の作品は記憶に残らなかった作品(false)と判定される。
利用者の頭の中に記憶として残る作品の推定を、上記の式で残ったか否かの真偽判定で行った。美術鑑賞は視覚を用いた活動であり、話を聞くことや味わうことのような他の感覚を用いた活動と比べて、対象が記憶に残りやすいと考えられる。ゆえに、平均鑑賞時間より短い鑑賞時間であっても、極端に短くない限り記憶に残ったと判定するようにした。本来人間の記憶は、覚えている覚えていないの2択ではなく、「鮮明に覚えている」や「曖昧だけど覚えている」というように、いくつかの段階がある。美術鑑賞においても同様に、各作品に対する記憶の度合いがあるはずである。しかし、人間の記憶の度合いは作品を見たときの印象の強さや気分によって変化すると考えられるため、観賞時間の長さという指標のみで作品に対する記憶の度合いを推定することは一般に困難である。今後、脳波計の装着や様々な評価項目への回答などの利用者にかける負担を最小限にした方法で、利用者の記憶の度合いを推定可能な指標を模索しなければならない。
4.1.2 鑑賞時間と記憶の関係
鑑賞体験記録の作成は、「長時間鑑賞した作品は記憶に残りやすい」という仮説に基づいている。本研究では、この仮説を検証するための実験を行った。実験の方法は、12人の被験者が8枚の絵画を時間制限を設けずに鑑賞し、2ヶ月後に、観賞した8枚を含む48枚の中から覚えている作品を選択するという手順である。この実験に参加した被験者12人は、美術の専門家や愛好家ではなく、美術に関して専門的な知識を持たない一般的な人で構成されている。
被験者は1人ずつ、3軸角度センサ搭載のヘッドフォンを装着し自動走行するATに搭乗して、8枚の絵画が展示されている簡易美術館を一巡した。ATは各絵画の前で、絵画の方向に前を向けて停止し、被験者が目の前の絵画の観賞を終えて次の絵画へ移動するという操作をするまでATは停止し続けた。停止中に被験者は、ATのタッチパネルディスプレイに表示される画像とテキスト、ヘッドフォンから流れる音声解説により様々な絵画に関する情報を得ることができる。ATは自身の動作と位置情報として読み取ったRFIDタグのID、搭乗者の頭の角度を随時ログとして記録しており、そのログから各作品の観賞時間を算出した。被験者毎に、8枚の絵画の鑑賞に要した総鑑賞時間、絵画1枚の平均鑑賞時間、絵画による鑑賞時間のばらつき度合いを示す標準偏差を表4に示す。
表4から、作品毎の平均鑑賞時間と標準偏差にばらつきが見られ鑑賞方法に個人差があることが読み取れる。ID=5やID=6の被験者は絵画8枚の鑑賞時間に対する標準偏差が小さく、全ての絵画をほぼ均等に鑑賞したことがわかる。一方、ID=1やID=11の被験者は標準偏差が大きいことから、気に入った絵画はじっくりと鑑賞し、少し鑑賞してあまり面白くないと判断したらすぐに次の作品へ移動するという方法で鑑賞したことがわかる。また全体を通して考察すると、作品毎の平均鑑賞時間の全体平均が1分40秒以上という結果から、美術の愛好家でない初心者でも目の前に作品があり、同時にその作品に関する解説を得ることができれば、1作品につき1分?2分程度の時間、鑑賞することがわかった。このことから、1回の美術館訪問で膨大な数の作品を鑑賞しようとすると長時間経過し、利用者は疲労し、さらに初心者であれば鑑賞するという行為に辟易してしまう可能性が考えられる。利用者が頭の中で十分に処理できるように、鑑賞する作品と時間を限定することの重要性が明確化したと思われる。
被験者が簡易美術館を1巡して8枚の絵画を観賞した日から2ヶ月後に、同じ被験者12人に対して、展示されていた絵画8枚と展示されていないダミーの絵画40枚の計48枚の絵画をランダムに並べて提示した。被験者はその48枚の絵画の中で、今回の実験で訪れた簡易美術館で鑑賞したことを覚えている作品を選択した。今回の実験で鑑賞した絵画は8枚と少なく、簡単に全体を覚えられる量であったため、被験者は平均して8枚中6?7枚の絵画を覚えていた。そこで、本実験では別の設問で、展示されていた8枚の各絵画の鑑賞すべきポイントとして解説された絵画の部分を尋ねた。解説される絵画の部分の例を、図に示す。被験者は、8枚の各絵画において、ダミーを含む6つの中から鑑賞ポイントとして実際に解説された部分を回答した。本実験では、絵画としては覚えていたが鑑賞ポイントを全く覚えていなかった作品を排除し、絵画全体も鑑賞すべきポイントも覚えていた作品を記憶の中に残っている絵画と判定した。

図4.2: 解説される絵画の部分の一例
4.1.1節で述べた式に基づいて簡易美術館での鑑賞時間からシステムが記憶に残っていると判定した作品と、被験者が実際に詳しく覚えていた作品を被験者毎に評価した。具体的には、システムが被験者の記憶に残っていると判定した作品の集合を、被験者が実際に詳しく覚えていた作品の集合(ダミーを除く)を
として以下の2式により適合率と再現率を算出した。被験者毎の適合率と再現率を表すグラフを図に示す。
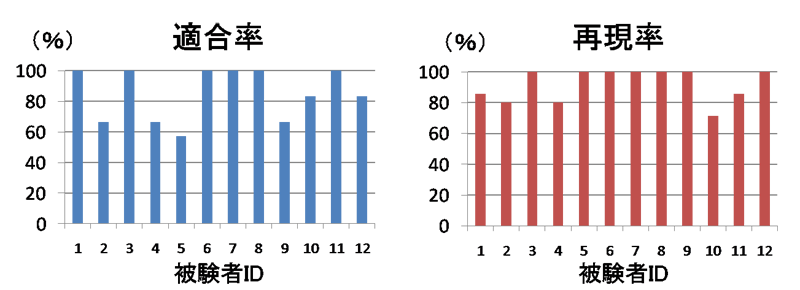
図4.3: 被験者毎の適合率と再現率
結果としては、適合率の全体平均が85.3%、再現率の全体平均が91.9%という比較的高い精度が得られた。また、以下の式により求めるエラー率(記憶に残っていないとシステムに判定された作品の中で、実際には被験者が覚えていた作品の比率)が25.0%と適合率に対して低いことからも、作品の鑑賞時間と記憶には関係があり「長時間鑑賞した作品は記憶に残りやすい」という仮説は有効であることが示された。今回の実験では展示した作品が8枚と少なく、被験者にとって作品全部をじっくり鑑賞することも、覚えることも困難な数ではなかった。実際、システムが長い時間鑑賞したと判定した平均作品数は6.75枚で、被験者が詳しく記憶していた平均作品数は5.8枚であった。このことは、エラー率が10%未満にならなかった原因としても考えられる。今後更なる仮説の裏付けを得るためには、実際の美術館で展示されている作品数に近い数で再度検証する必要があると思われる。
4.1.3 鑑賞時間に基づく興味推定の可能性
前の4.1.2節で展示作品の鑑賞時間と記憶には関係があり、長時間鑑賞した作品は記憶に残りやすいということが示された。利用者の記憶の推定に止まらず、本研究では、鑑賞時間に基づき暗黙的な方法で利用者の鑑賞した作品に対する興味を推定可能かどうかを調べた。「好きこそ物の上手なれ」という諺に示されるように、教養を深めていくための手がかりとして興味や好みの取得は重要であると考える。
本研究で構築したシステムを用いることで、利用者は作品毎に「作品全体の紹介」「鑑賞すべきポイント」「作品の作者について」「作品が制作された年代・様式について」という4つの観点からの解説を選択的に得ることができる。インタフェースについては後の4.3節で詳細を述べる。この複数観点からの解説は、利用者の鑑賞の補助的な役割としてだけでなく、興味をもった作品に関しては、いろいろなことを知りたいと思うことから複数の観点からの解説を聞き、結果的に鑑賞時間が長くなることを期待して作成したものである。また、利用者が気になった作品を後から何度でも鑑賞できるように、鑑賞し終えた作品までの後戻りを可能にした。このような興味をもった作品に対する自然な利用者のアプローチを想定すると、鑑賞時間の長さに基づいて利用者が興味をもった作品を推定できると考えた。
前節の実験において、被験者12人が簡易美術館で1人ずつ8枚の作品を鑑賞し終えた直後に、被験者の興味をアンケートに基づき調査した。アンケートで被験者に尋ねた質問は、以下の2点である。
-
1.8枚の作品に対して興味をもった順に順位を付けてください
-
2.8枚の各作品に対する興味の度合いを5段階で評価してください(5:大変興味あり、4:興味あり、3:どちらでもない、2:あまり興味なし、1:興味なし)
まずアンケート調査から、被験者が展示作品8枚中3位までを「大変興味あり」「興味あり」とする割合が83%、4位までを「大変興味あり」「興味あり」とする割合が42%であるという結果が得られた。このことから、利用者が興味をもつ作品は全8枚中であれば上位の3枚であるとした。次に、システムが鑑賞時間の長さから利用者が興味をもった作品を推定する際の基準であるが、前節と同じ式で判定基準を算出すると抽出数が6枚以上となり、利用者が興味をもつとする3枚の倍以上になってしまう。そこで、今回の興味推定実験では、判定基準を利用者毎の各作品に対する平均鑑賞時間以上鑑賞した作品とした。そのため、被験者が興味をもっているとシステムが推定した平均作品数は3.5枚となった。
今回は被験者が興味をもっているとシステムが判定した作品の集合を、被験者が実際に興味をもった作品の集合を
として4.1.2節の2式により適合率と再現率を算出した。その結果、適合率の全体平均が59.7%、再現率の全体平均が69.4%となった。実際の被験者毎の適合率と再現率を表すグラフを図に示す。
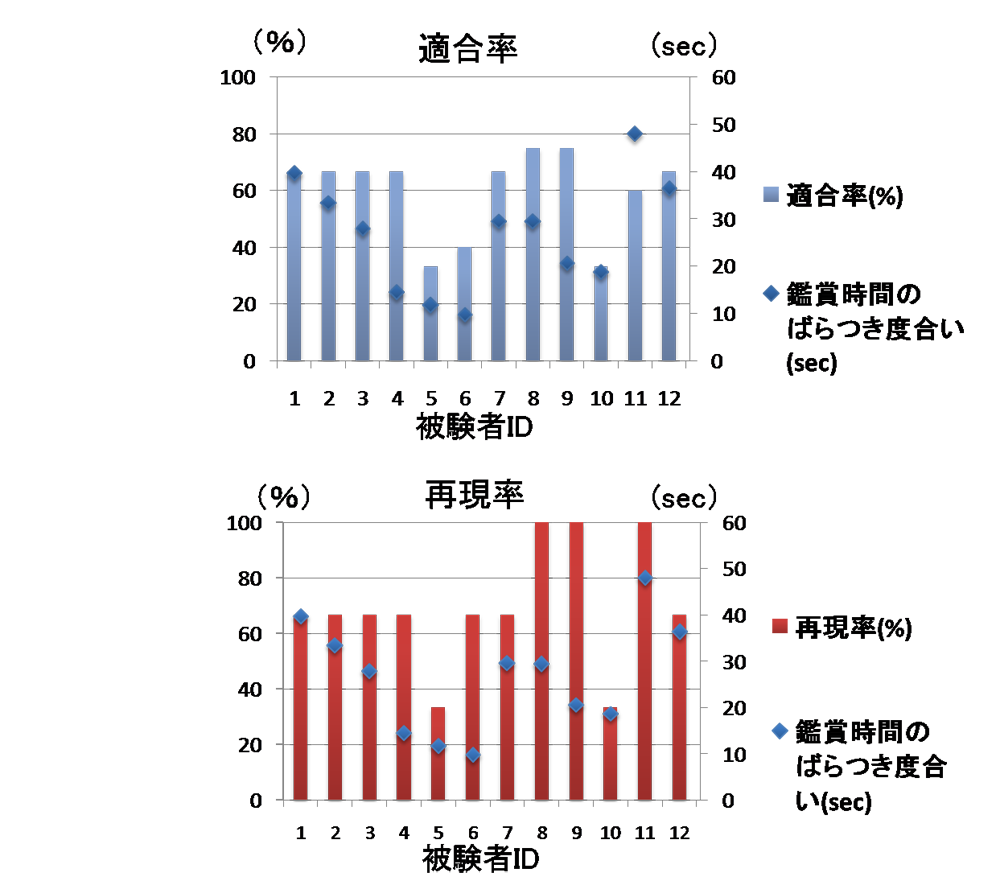
図4.4: 被験者毎の適合率と再現率
図のグラフからわかるように、8枚の作品の鑑賞時間にばらつきがなく、どの作品も同程度の時間をかけて鑑賞した被験者の適合率及び再現率は低い傾向がある。ゆえに鑑賞時間による興味推定は、作品によって鑑賞時間に差が現れない利用者には適応しないことがわかった。しかし、作品毎の鑑賞時間の差に比例して適合率や再現率が上がるというわけではなく、適合率と再現率の一定の精度を保つための鑑賞時間のばらつき度合いの基準は今回の実験ではわからなかった。
次に、被験者の鑑賞時間が長かった作品に注目して分析を行った。実際の鑑賞時間が長かった作品の中に、正解の作品として利用者が興味ありと判定する3枚が含まれる割合を示したグラフが図である。上記の適合率と再現率から細かい粒度での分析を避け、鑑賞時間と興味の大まかな関係性を見出すことを考え、システムが鑑賞時間の長い順に順位付けした作品を1位?3位、4位?6位、7位?8位でグループ分けをした。このグループ分けは、利用者が興味ありと判定するのは上位3枚であったことに基づいている。その結果、鑑賞時間の長い順で1位?3位、すなわちシステムが「興味あり」と判定した作品の集合の中に、利用者が実際に興味ありと判定する正解作品が含まれる割合は61.1%で、「どちらでもない(4位?6位)」や「興味なし(7位?8位)」と判定した作品の集合に含まれる割合の27.8%、16.7%より高かった。また、システムが「興味あり」「どちらでもない」「興味なし」と判定した作品の集合を調べると、各集合に含まれる作品に被験者が付けた実際の順位の平均は、それぞれ3.5位、4.6位、5.7位となり、被験者が付けた上位の作品を「興味あり」と判定していることがわかった。この結果から、システムによる判定は大まかに見ると正しく、利用者が長時間鑑賞した作品はその利用者が興味をもった作品であるという関係が成り立つ可能性が示せた。
しかし、今回の実験の被験者の中には「作品自体には興味がなかったが、作品の端に書かれた作者のサインが気になって長時間見ていた」という人がいた。人間の興味は、変化しやすく、作品単位よりもっと細かい部分に対するものである可能性が高く、取得が非常に困難であることがわかった。また、アンケートの結果から美術鑑賞の初心者は自身の興味を明確に把握しておらず興味の有無の判定が曖昧であると考えられる。今回の分析から、利用者の展示作品に対する興味を推定するためのパラメータの1つとして作品の鑑賞時間は有効であるが、精度よく興味を推定するためには他の指標も必要であることがわかった。可能な限り暗黙的に測定できるもので、興味推定に効果的なパラメータを模索することは今後の課題とする。
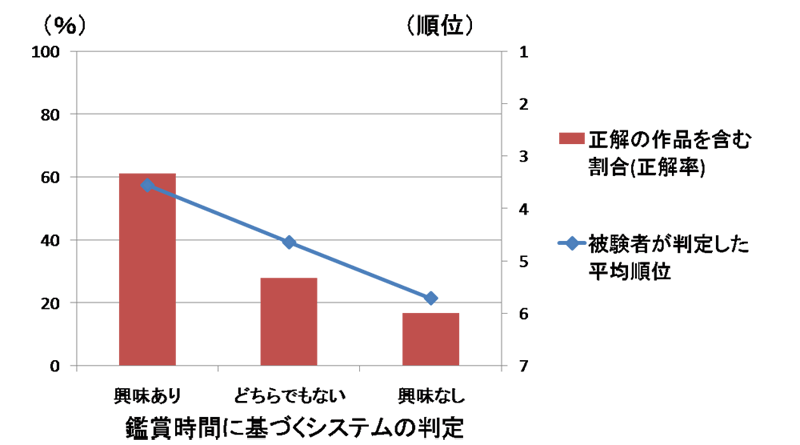
図4.5: システムが鑑賞時間により評価した作品の分析
4.2 システム構成
本研究で提案・構築した鑑賞体験を個人化するシステムの概要と構成を図に示し、処理手順に従い説明する。
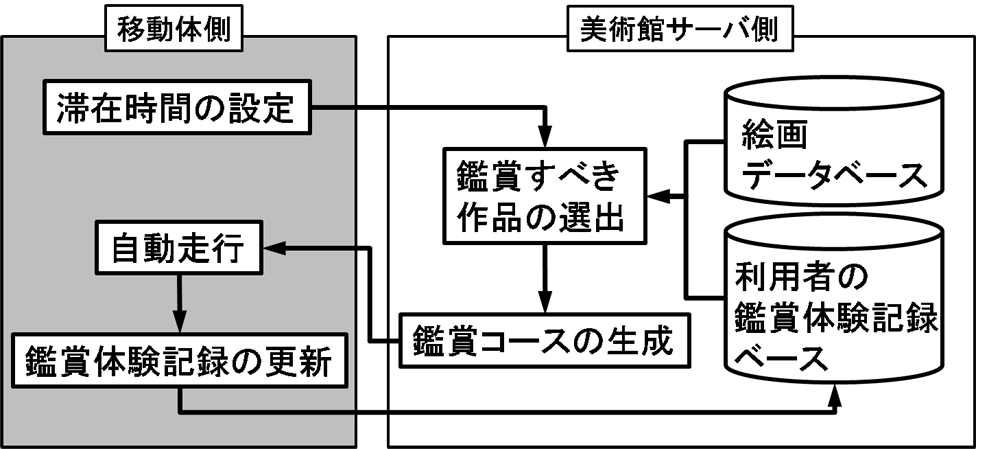
図4.6: 鑑賞体験個人化システムの構成
まず、ATのタッチパネルディスプレイで利用者がユーザIDの登録と、美術館滞在予定時間の設定を行い、そのデータを美術館側のサーバPCに送信する。サーバには、利用者毎の体験記録を保持するデータベース(利用者の鑑賞体験記録ベース)と、そのサーバが置かれた美術館に展示されている絵画の基本情報と位置情報、関連作品の情報を保持するデータベース(絵画のデータベース)がある。関連作品の情報はWebページや文献を基に取得可能であり、データベースには関連する作品の画像や作品名などの基本情報だけでなく、関連元の作品とどう関連するのかという関連性の情報も含まれている。次に、登録されたIDの利用者の体験記録と、絵画のデータベースに登録された情報を照合して、利用者が過去に訪れた美術館で鑑賞した作品と関連する作品を選出し、その後、選出した作品の位置情報から利用者が設定した予定時間内で、可能な限り移動時間を短く、適切な数の作品を鑑賞するコースを生成する。コース決定後、ATは鑑賞すべき作品の前で停止しながらコース上に従って自動走行する。そして、鑑賞が終了すると同時に新たな鑑賞体験記録が生成され、利用者の鑑賞体験記録ベース内の該当ユーザの記録を更新する。
以下では、まず、利用者が入力したユーザIDと滞在予定時間の情報、データベースに保持されている情報から、利用者が鑑賞すべき作品を選出する手法について説明する。次に、選出した作品の位置関係に基づいて、自動走行して巡る鑑賞コースを生成する手法についても詳しく述べる。
4.2.1 鑑賞すべき作品の選出グ
利用者が鑑賞すべき作品の抽出においては、抽出する作品の数と質のバランスが重要である。作品の数は、利用者が設定した美術館での滞在予定時間により決定し、作品の質は、利用者が過去に鑑賞した作品との関連により決定する。利用者が設定した滞在予定時間で美術鑑賞を十分に楽しめるような数に鑑賞する作品の数を限定する必要があるが、その場合、より質の高い作品を選出することが求められる。本システムでは作品と作品の間の関連性を表5のように分類し、その分類に応じて鑑賞すべき作品の優先度を決定する。
Webページや美術に関する文献等で、美術の専門家あるいは美術の愛好家によって紹介されている作品間の関連性を「作品関連」とする。「作品関連」がある例としては、画架を隣同士に並べて2人の画家が同じ風景を描いた2つの作品や、古い時代の画家が描いた作品とその作品に影響を受けて制作された作品が挙げられる。このような2作品を、完成された作品を見ただけでは気がつかない裏側にあるつながりを知った上で比較することで、作者による対象の捉え方の違いや描き方の違い、過去の画家からの影響の受け方など、鑑賞者は作品について様々なことを考える糸口を容易に得ることができる。ゆえに、「作品関連」がある2作品の優先順位を最上位にした。次に優先順位が高い関連が「作者関連」である。「作者関連」は作者が同じである作品間の関連性のことを示す。同じ作者によって制作された複数の作品を比較することで、鑑賞者は筆使いや色使いなどの作者の特徴に気付くことができる。また、同じ作者でも制作された年代が異なる作品を見比べてみると、作風に変化がみられ作者の技量の変化を感じることができる。最後に、優先順位としては低いが「様式関連」というつながりが考えられる。様式とは「印象派」や「後期印象派」、「ロマン主義」といった分類のことで、それぞれの年代に起こった美術運動や当時主流であった絵画の作風を意味するため、ここでは同じ様式の作品は同じ時代に制作されたと捉えている。作者が異なる作品でも同じ様式であることを意識して見比べると、その年代の出来事や人々の思想などを感じることができる。
絵画データベースには、絵画作品毎に作品名、作者名、様式名(年代)、音声による解説時間、「作品関連」という形で関連する絵画作品のデータが格納されている。利用者の鑑賞体験記録ベースにも、利用者が過去に訪れた美術館で長時間鑑賞した作品毎の作品名、作者名、様式名(年代)データが格納されている。ただし、利用者の鑑賞体験記録ベースは世界中の美術館で鑑賞した作品が、ネットワークを介して最新の状態で集約されていると想定する。絵画データベースと利用者の鑑賞体験記録ベース、この2つのデータベースの情報を図のように照合して、今回訪れた美術館で利用者が鑑賞すべき作品に優先度を付与する。優先度は作品間の関連の種類に基づいて決定する。各関連の優先度は表5で示したように定める。先に述べたように、「作品関連」で関連している作品同士を見比べることは、利用者の豊かな鑑賞を促す効果が最も大きいと考えられる。ゆえに、豊かな鑑賞を促進する効果という観点で考慮して、「作品関連」で関連する作品の優先度を最も高く、次いで「作者関連」、「様式関連」の順に優先度を決定した。この値が適切かどうかは、今後検証していく必要がある。

図4.7: 優先度の算出方法
図に示した例に基づいて、優先度の算出方法について説明する。まず、図の絵画?と絵画?はWebページや文献で関連があると紹介されている「作品関連」で関連する2作品であり、利用者の鑑賞体験記録の中に絵画?があることから、今回の美術館での絵画?の優先度は「6」となる。次に、今回の美術館で展示されている絵画?は、絵画?の作者が制作した別の作品である絵画?と絵画?が利用者の鑑賞体験記録の中に含まれることから、絵画?の優先度は「作者関連」の優先度「3」が2つで「6」となる。同様に、絵画?の優先度は、利用者の鑑賞体験記録の中に同じ作者の作品である絵画?があることから「3」である。また、絵画?は今回美術館で展示されている作品の1つである絵画?と様式が同じであることから絵画?の優先度は「1」と算出される。「作品関連」で関連してしている作品同士は、「作者関連」や「様式関連」としても関連している場合がある。その場合は、優先順位が上位の関連の優先度で計算される。
美術館の全展示作品に鑑賞すべき優先度を付けた後、優先度の高い順にソートし、優先度上位の作品を抽出する。この時抽出する作品の数は、利用者が設定した美術館滞在予定時間により決定する。絵画のデータベースに格納された作品毎の音声による解説時間を、各作品の予想鑑賞時間として選出する作品の大体の数を計算するが、作品の展示位置によっては移動時間を多く必要とする場合も考えられるので、鑑賞すべき作品の候補はやや多めに選出する。このことについては、次節で詳しく述べる。
4.2.2 鑑賞コースの生成方法
サーバPC上において、選出した作品の優先度と位置情報から利用者が設定した時間内で、優先度の高い作品を適切な数だけ鑑賞するコースを生成する。その鑑賞コースの生成方法について説明する。一般に最適経路を求める問題は、巡回セールスマン問題に代表される最適組み合わせ問題である。この種の問題は、経路数が増えていくことで組み合わせが指数関数的に増加し、複雑さが増大することが知られている。そのため、ほとんどの解法がいわゆるヒューリスティックな手法によるものである。その代表的なアルゴリズムとしては、局所探索法、分岐限定法などがあり、最近では遺伝的アルゴリズムなどが知られている。これらの手法の適用には、いわゆるNP困難性の検証が必要となる。先に述べたように、解の組み合わせが指数関数的に膨れ上がってしまうからである。このような場合、通常の多項式アルゴリズムは存在しないと考えられ、NP困難性からヒューリスティックな手法の有効性が認められることになる。
制限時間を考慮して最適経路を求める問題は、個人適応する施設の案内コースや観光コースを自動生成するシステムを研究・開発する分野において、ヒューリスティックではあるが様々な方法で解かれている。その1つの方法として、ナップザック問題の解法が挙げられる。ナップザック問題とは、あるナップザックに異なる大きさと価値をもつ品物を、どのようにして価値が高くなるように最も多く詰め込むかという問題である。先に述べた研究では、最適経路の探索において、通過し得る経路の組み合わせ数が限られている場合が多い。そのため、ナップザック問題における品物を「経路」、品物の大きさを「経路を移動する場合の所要時間」、品物の価値を「経路上にあるお店や観光名所の数」として、逐次法により、起こり得るパターンを全て調べることで、厳密な最適経路を求めることができる。しかし、本システムでは、美術館という移動経路の自由度が比較的高い建物内での最適経路探索のため、通過し得る経路の組み合わせ数は非常に多い。そのため、上記の研究で用いられている方法をそのまま適用することができない。
また、別の最適経路を求める問題の解法として、最短ハミルトン路問題の解法が挙げられる。ハミルトン路とは、グラフ上の全ての頂点を1度ずつ通る路のことで、本システムの場合は優先度が高い作品を一筆書きで結んだ経路となる。最短ハミルトン路問題とは、それらの経路の中で、長さが最短のものを求める問題である。優先度がある一定以上の作品を抽出して最短ハミルトン路を求めた結果、その経路に従って移動した場合の所要時間が制限時間内であれば、その経路が最適経路となる。しかし、優先度が高いとして抽出した作品が多く、所要時間が制限時間を超えてしまった場合、優先度の低い作品を通過点から除外するか、位置の観点から経路を長くしている作品を除外するかが問題となる。さらに、最短ハミルトン路問題はNP困難なため、多項式時間の解法は期待できない。単純に全ての経路を試すアルゴリズムでは、候補として抽出する作品数が多くなるにつれて膨大な計算量となり、実用的な時間で計算することが不可能になるという問題もある。
そこで、本システムでは利用者が設定した時間内に、それぞれの利用者にとって価値の高い作品を巡る最適経路を、ナップザック問題の解法と最短ハミルトン路問題の解法のハイブリッドな方法で算出する。美術館のフロアを区分し、区分した各エリア内において優先度の高い作品を結ぶ最短ハミルトン経路を求め、区分したエリアをナップザック問題の品物として、エリア毎の最短ハミルトン路を組み合わせる方法である。そのアルゴリズムを図に示し、各段階で行う具体的な処理内容について以下で説明する。
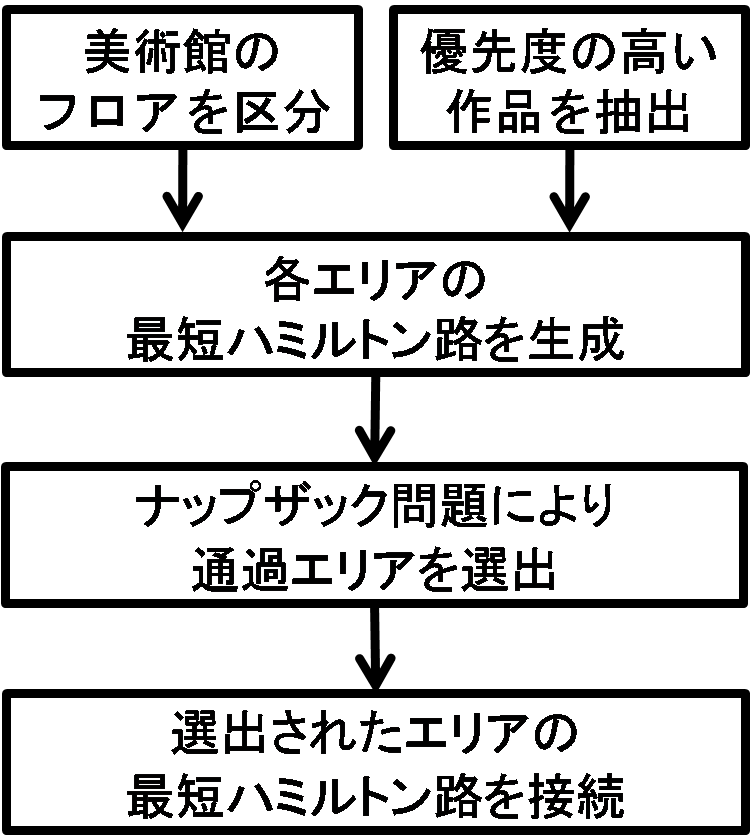
図4.8: 鑑賞コース生成アルゴリズム
-
1.フロアの区分
フロアを区分する方法には、図に示すように「カテゴリ区分」と「距離区分」の2種類がある。美術館では作品を無計画に展示するのではなく、同じカテゴリやテーマの作品を隣接させて展示している場合が多い。同じカテゴリに分類される作品同士は関連しているので、見比べやすくするためである。ゆえに、同じカテゴリとして分類される作品は連続して鑑賞することが望ましい。そのため、図の上段で示すようにカテゴリでフロアを区分する。カテゴリ区分で分けられたエリア内で最短ハミルトン路を生成すると、同じ美術館内で関連する作品を連続的に鑑賞することができる。
カテゴリでまとめて作品が展示されていない場合は、図の下段で示す通り、美術館のフロアを入口から出口に向けて距離的に近い作品をまとめるように区分する。これは、通過した場所を再度通ったり、戻ったりすることで移動時間が増加することを防ぐためである。距離区分で分けられた各エリア毎に生成されたハミルトン路をつなぎ合わせると、無駄な移動時間のないコースを生成可能である。距離区分は人気ランキング上位の作品を巡るコース等の、カテゴリによる関連を意識する必要性が低い場合にも用いる。
-
2.作品の抽出
前節で、美術館の全展示作品に対して、利用者に応じた鑑賞すべき優先度を付ける方法について説明した。前節の方法で全展示作品に優先度が付与された後、優先度の高い順にソートし、優先度が上位の作品を抽出する。この時抽出する作品の数は、利用者が設定した美術館滞在予定時間により決定する。データベースに格納されている作品毎の音声解説時間を各作品の予想鑑賞時間として、滞在予定時間内に鑑賞可能であろう大体の作品数を計算する。作品の展示位置によっては、その作品を鑑賞コースに含むと、含まない場合に比べて、移動時間が大幅に長くなるような作品が存在することが考えられ、その作品を除いて、優先度がその作品の次に高い作品を鑑賞コースに含めた方が全体として良い場合もある。その場合を考慮して、鑑賞すべき作品は、滞在予定時間と各作品の予想鑑賞時間から算出する作品数の1.2倍の数を選出する。この比率は、美術館の規模や、フロアを区分したときのエリアの大きさによって最適な値が変化すると考えられる。ゆえに、今後は、美術館の規模やエリアの大きさなどの指標から最適な比率を算出する式を、実験的に求めていく必要がある。
-
3.各エリアの最短ハミルトン路の生成
区分されたエリア内にある、鑑賞すべき作品として抽出された優先度が高い作品を通る最短ハミルトン路を生成する。作品の位置座標から最短ハミルトン路の距離を算出し、予め設定した移動体の速度から移動時間を求める。そして、移動時間とエリア内の優先度が高い作品を鑑賞した場合の予想合計鑑賞時間を合計した時間を、エリアを通過するときにかかる時間とする。
-
「2.作品の抽出」で抽出した優先度が上位の作品を、ここでは鑑賞コースに含まれる候補作品と呼ぶ。区分したエリアを品物、各エリア内の最短ハミルトン路に従った移動時間と候補作品の予想鑑賞時間を合計した時間を品物の大きさ、各エリア内にある候補作品の合計優先度を品物の価値として、ナップザック問題を解く。そして、その解が鑑賞コースが通過すべきエリアの集合となる。
ここでの目的関数
は、定められた時間
(ナップザックの大きさ)に合計優先度
(価値)の候補作品があるエリア
をどれだけ多く鑑賞できるかという設定となる。つまり、以下に示す式の通りである。
目的関数:
制約条件:
4.ナップザック問題による通過エリアの選出
この時、
はエリアの番号であり、
は選択されたエリアの通過時間(移動時間と鑑賞時間の合計)を示し、エリア
で示される。
-
5.選出されたエリアの最短ハミルトン路の接続
ナップザック問題の解法を用いて通過すべきエリアを選出した後、選出された全エリアの最短ハミルトン路を接続する。まず、入口から最も近いエリアの最短ハミルトン路を選出し、次に、そのエリアに最近のエリアの最短ハミルトン路をつなげていく。これを繰り返して、入口から出口までの最適経路、すなわち鑑賞コースを作成する。
上で説明したアルゴリズムで、実際に鑑賞コースを生成した結果を図に示す。図の上段と下段ともに1作品当たりの予想鑑賞時間を1分と設定し、上段は美術館滞在予定時間を10分、下段は20分にそれぞれ設定した結果である。図からわかるように、鑑賞すべき作品として抽出された候補作品のうち、優先度の高い作品を利用者に鑑賞させるように移動する鑑賞コースを生成することができた。さらに、鑑賞すべきとして抽出する作品の指標を、優先度ではなく人気ランキングの順位に変更すると、同様のアルゴリズムで人気ランキング上位の作品を時間内で鑑賞するコースを生成することも可能である。
本研究で考案したアルゴリズムは、抽出作品の数がコース生成に与える影響が大きく、候補としての作品を滞在予定時間に対して多く抽出すると、優先度があまり高くない作品を多く含むコースを生成する場合がある。そのため、設定する滞在予定時間に応じて、鑑賞コースに含む候補としての作品抽出数をバランスのとれた数にすることが重要であることが判明した。
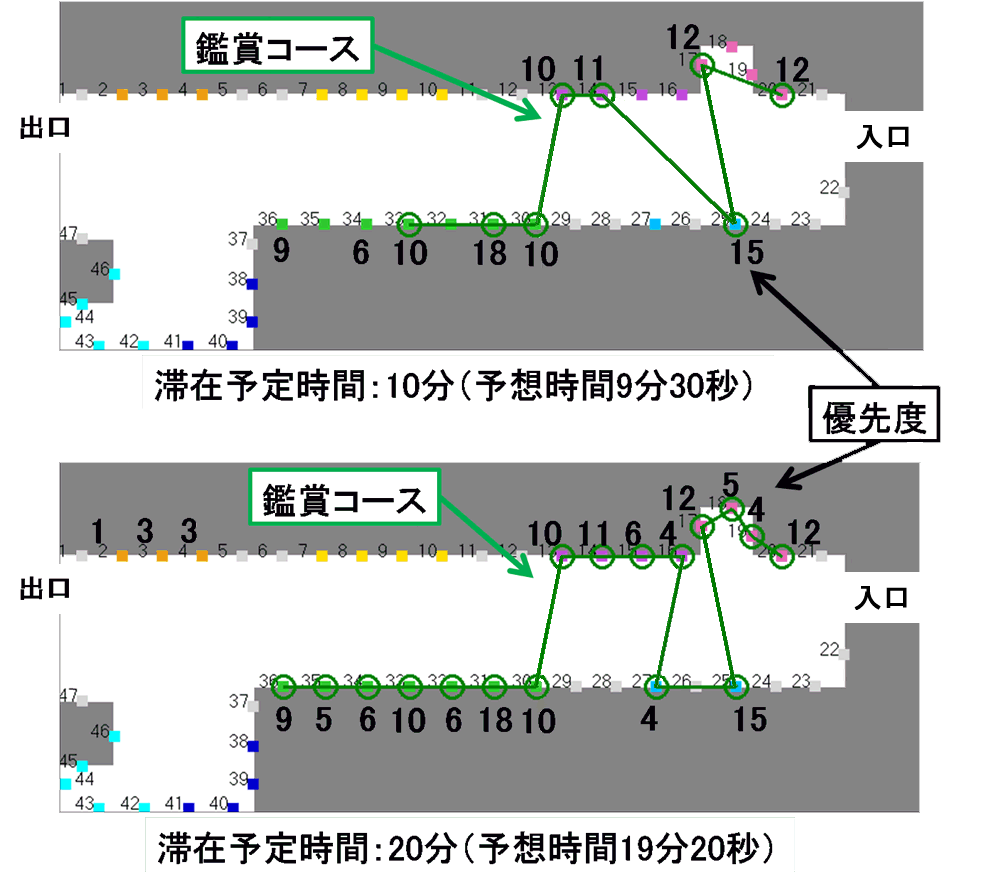
図4.9: 鑑賞コースの生成例
事前に設定する美術館滞在予定時間内で、可能な限り多くの作品を鑑賞することが必ずしも豊かな鑑賞体験となるわけではない。美術館の滞在予定時間が比較的短い場合は、その時間内で多くの作品を鑑賞することが利用者に望まれる可能性が高いが、滞在予定時間が長い場合は、利用者の美術鑑賞による疲労を考慮すると1つの作品を解説時間より長く鑑賞した方が、忙しく膨大な量の作品を鑑賞するより効果的である可能性が高い。しかし、鑑賞方法は利用者によって異なることが予想されるため、滞在予定時間に対する鑑賞作品数を調節することができるような仕組みが必要である。本研究で考案したアルゴリズムは、1作品あたりの予想鑑賞時間とする時間をパラメータで調節することで滞在予定時間に対する鑑賞作品数の調節が可能であり、利用者にとって適切な数の作品を含む鑑賞コースを生成することができる。
またここでは、フロアを区分したときの1つのエリアに含まれる展示作品の数を7作品以下に制限した。これは、最短ハミルトン路を生成するときに、時間がかかるためである。ハミルトン路の計算では、通過点としての作品の候補が増えるに従って、計算時間が指数関数的に増大する。実験的に、実用的な計算時間で最短ハミルトン路を求めることができるのは、最大で7作品を通過するハミルトン路であると判断し、この数を基準としてフロア区分を行った。しかし、プログラムの作成方法や処理を行うマシンの性能を改善することで、計算時間を削減することは十分に可能であると考えられる。その場合、エリアに含まれる作品の上限数を増やすことがきるため、今後、計算時間を短縮するような仕組みに改良する必要がある。
4.3 ユーザインタフェース
実世界における活動には、当然、時間的制約が設けられる。美術館での鑑賞体験も同じである。本研究では、時間を有効に活用することを目指し、自動走行する移動体に搭乗して利用者に適した作品を計画的に巡るというシステムを構築した。しかし、時間の有効活用に関しては、自動走行する移動体により鑑賞する作品を限定することで利用者の自由が制限されるというトレードオフの問題が生じる。そこで、本研究では可能な限り利用者の不満を軽減するような仕組みを考え、制限時間内で充実した鑑賞体験を提供するという利点とのバランスを重要視する。予め生成した鑑賞コースに含まれていないが、自動走行中に気になった作品があればその作品の前で停止、あるいはその作品の前まで後戻りするといった制御を簡単に行えるようにすることで、自動走行に利用者の意図を反映させる。利用者の意図を無制限に反映させると、制限時間内でコースを走行し終えることができなくなるが、優先度の低い作品を省略することや鑑賞時間の延長を意識させたり、時間管理を促進したりすることで、利用者が納得した上での鑑賞支援を実現する。その上で重要となるのが、搭乗者である利用者に対するインタフェースである。ここでは、利用者が自身に適応した鑑賞コースを確認するためのインタフェース、作品を鑑賞する際の解説インタフェース、移動体の停止や走行再開の切替制御方法について説明する。
4.3.1 ユーザID入力と鑑賞コース取得のインタフェース
美術館の中に入り入口付近でATに搭乗したら、まずATのタッチパネルディスプレイに表示されている図の画面で、ユーザIDと鑑賞の基準となる滞在予定時間の入力を行う。ユーザIDは、予め登録されているものとする。ユーザIDと時間を入力したら、図の「OK」ボタンを押す。すると、入力したデータは美術館に設置されたサーバに送信される。美術館のサーバは節で述べた流れに従って、受信したユーザIDの利用者に個人化した鑑賞コースを生成し、データ送信元のATに返信する。
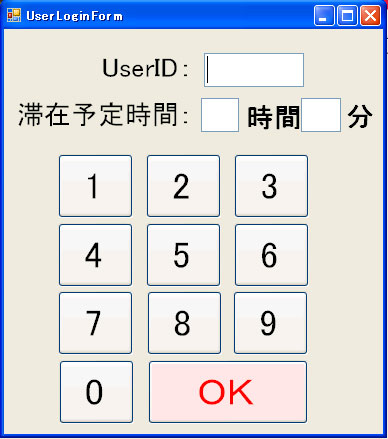
図4.10: ユーザIDと滞在予定時間の入力画面
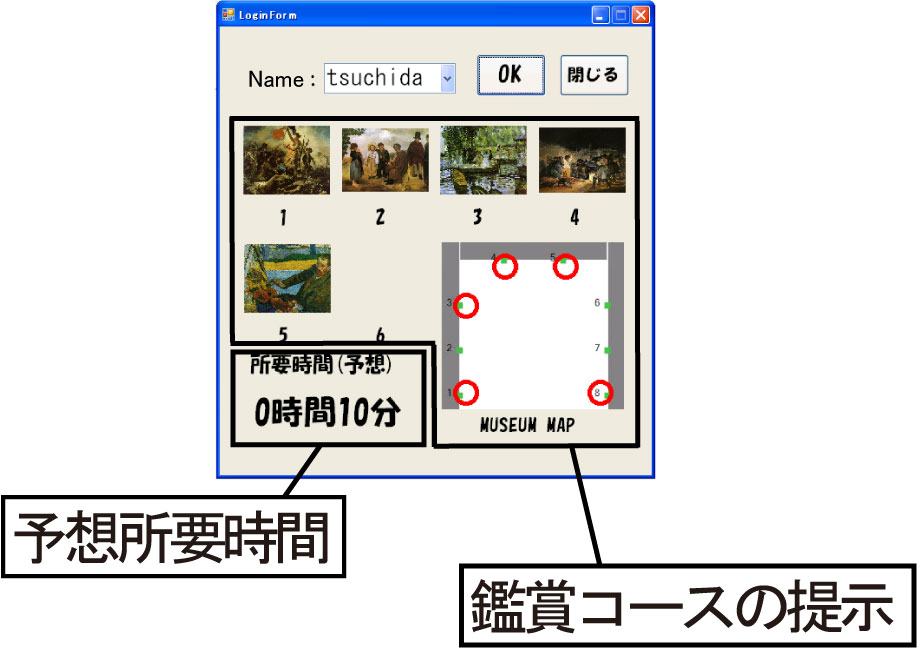
図4.11: 鑑賞コース確認画面
鑑賞コースのデータを受信したATのディスプレイには図に示すコース確認画面が表示される。コース確認画面には、鑑賞する順番に並んだ作品のサムネイル画像と、それらの作品の位置を示したフロア地図が提示される。他に、鑑賞コースに含まれる作品の音声解説を全て聞いた場合の鑑賞時間を、各作品の予想鑑賞時間として算出した予想所要時間も提示される。この時間は、利用者が入力した滞在予定時間と同じか、それより短い時間である。また、利用者は図に示す鑑賞画面上の、コース確認ボタンを押すことにより、鑑賞中あるいは自動走行中にいつでもコース確認画面を表示させることができる。
4.3.2 鑑賞中のユーザインタフェース
次に、自動走行及び鑑賞中のATのディスプレイの画面を図に示す。鑑賞コースに従って移動するシステムは、画面上部の「スタート」ボタンが押されると開始する。「スタート」ボタンはトグルボタンであり、自動走行中に押されると、ATは緊急停止してシステムも終了する仕組みである。
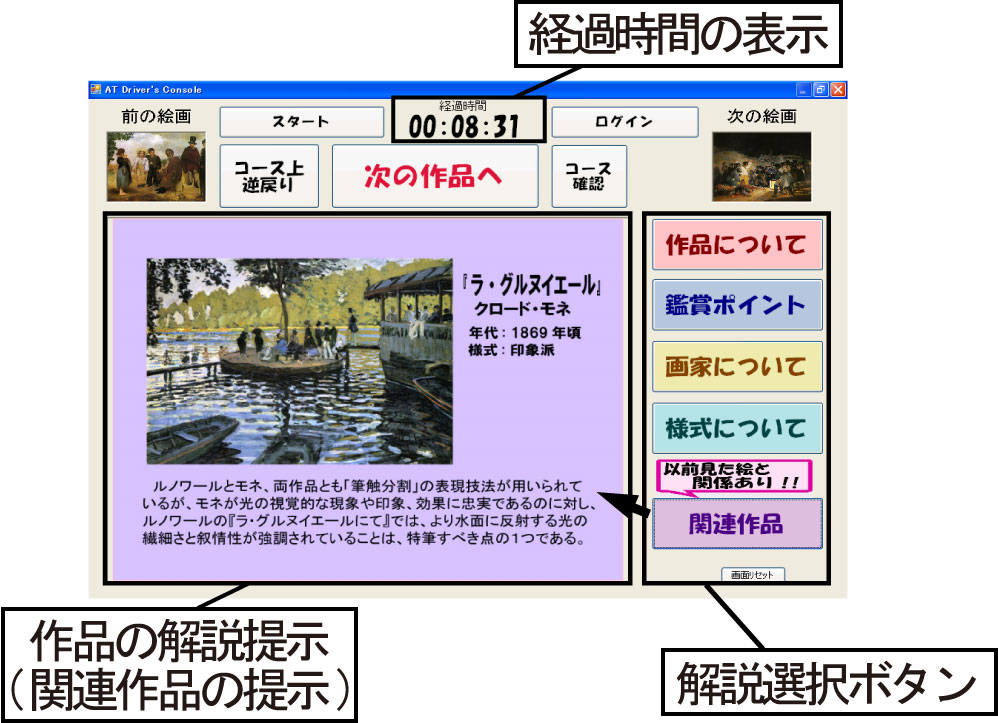
図4.12: 鑑賞画面
利用者は図の「次の作品へ」ボタンを押すことで、次の作品へ向かうことができる。ATは次の鑑賞コースに含まれる作品の前まで自動走行し、作品の方向を前向きにして停止する。停止すると同時に、ディスプレイに目の前にある作品の画像が表示され、図右側の解説選択ボタンで観点を選択することで、その観点からの解説が画像と音声で出力される。解説する作品の切り替えは位置情報により自動的に行われる。さらに、利用者は一度鑑賞し終えた作品でも、もう一度その作品を鑑賞したい場合「コース上逆戻り」ボタンを押すことで、直前に鑑賞した作品まで戻ることが可能である。
一度通過した作品に戻って鑑賞したり、1つ1つの作品を予想鑑賞時間より長い時間鑑賞したりすると、滞在予定時間内に鑑賞コースに含まれる全ての作品を鑑賞することができなくなる場合がある。しかし、利用者がどの作品をどの程度長く鑑賞するかを事前に把握することは不可能で、各作品を鑑賞する度に動的にコースを変更することは困難である。そのため本システムでは、鑑賞を開始してからの経過時間が滞在予定時間に近づいているにも関わらず、コースに未だ鑑賞していない作品が複数個残っている場合、未鑑賞作品の中の優先度が低い作品を省略することを促す仕組みを取り入れた。その画面を図に示す。次に向かう作品の優先度が低く、省略される対象となった場合、図に示すように次の作品のサムネイル画像の隣に「次の作品を飛ばします!!」アイコンが表示され、同時に省略を許可するかどうかの意思を確認ダイアログで利用者に問い合わせる。利用者が省略を許可した場合、次の作品となっていた作品の前でATは停止しない。一方、利用者が滞在時間の延長を許容して、作品の省略を許可しなかった場合、次の作品の前でもATは停止し、利用者はその作品を鑑賞できる。
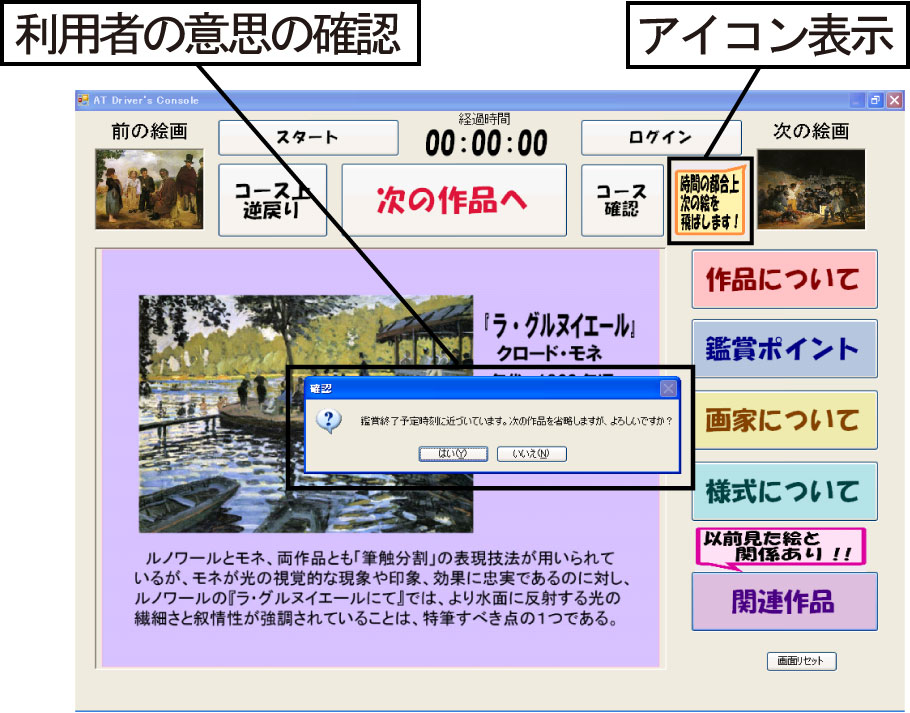
図4.13: 利用者の意思確認画面
このように、本システムでは利用者の了承を得た上で、時間の調整やコース変更を行うようにした。無論、計画通りに鑑賞体験を終了するように、利用者が時間管理を意識するような仕組みが望ましい。ゆえに、本システムでは、鑑賞を開始してからの経過時間を常時表示し、走行中のコースを常に確認可能にして、利用者にとって時間の管理を行いやすいユーザインタフェースの作成を心がけた。
4.3.3 搭乗者の頭の動きによる停止制御
ここまでは、タッチパネルディスプレイ上でのインタフェースについて述べてきた。ここでは、ボタンを押すという操作以外でATを制御する方法について述べる。近年、搭乗型移動体の走行支援システムの研究・開発において、利用者の操作に対する負担を軽減するためのインタフェースが探究されている。そのインタフェースはマルチモーダルの情報を使用しているシステムが多い。その例として、カメラにより取得する視線情報や顔の向きをを用いたものがある。これらは、搭乗者の視線の先や、顔が向いている向きに搭乗者が興味を持つ対象があると推定し、その方向に基づいて自動的に移動体が動くというシステムである。
美術館では作品が数多く展示されているため、鑑賞コースに従って走行している最中に、鑑賞コースには含まれていないが利用者にとって魅力的な作品、興味がそそられる作品が存在することが想定される。自動走行中に気になった作品が存在したら、利用者は自然とその作品の方向を向いたり、振り返ったりする動作をするだろう。その動作を暗黙的に推定し、移動体が自律的に途中で一時停止したり、利用者の頭が向いている方向にある作品に近づいたりする機能が必要であると考えた。また、本システムでは4.1.1節で述べたように、音声解説用のヘッドフォンに3軸角度センサが搭載されているため、利用者の頭の向きを暗黙的に取得することが可能である。そこで、自動走行中ATに搭乗した利用者の頭の向きを監視し、利用者が振り返る動作を検知したら停止して、直前に通過した作品の前まで後戻りする機能を実装した。
搭乗者の頭の動きによる停止・後戻り制御機能により利用者は、計画された鑑賞コースには含まれていないが、自動走行中に気になった作品があれば、振り返る動作をするだけでATを停止させることができる。しかし、試験的にこの機能を使用したところ、搭乗者の頭の向きを誤って推定し、誤動作することも多かった。振り返っていないが少し頭を動かしたり、近くにいる人に話しかけようとしただけで後戻り動作をしてしまう場合があった。ヘッドフォン搭載の3軸センサを用いれば、搭乗者の頭の向きは、カメラで搭乗者の顔や視線を認識するよりも軽い処理で取得できる。しかし、実用化するためには、搭乗者の頭の動きに対する素早い反応を維持しつつ、誤動作を防止するように今後工夫していく必要がある。
4.4 有用性の確認
本研究で構築した、美術館での鑑賞体験を個人化するシステムの有用性を確認するための被験者実験を行った。以下では、実験の方法と結果としての被験者によるシステムの評価について述べる。
4.4.1 実験方法
美術に関して専門的な知識をもたない被験者10人が、美術館Aと美術館Bの2つの簡易的模擬美術館で、制限時間付きの鑑賞体験を行った。各美術館の展示作品数は8枚で、展示作品とそれらに関する解説は、Webページや文献を参考にして筆者が作成した。美術館A、美術館Bともに、展示作品の配置、ATの走行経路は図に示すような構成である。美術館のフロア中央には、一度に全ての作品を見ることができないように背の高い仕切り板が存在する。
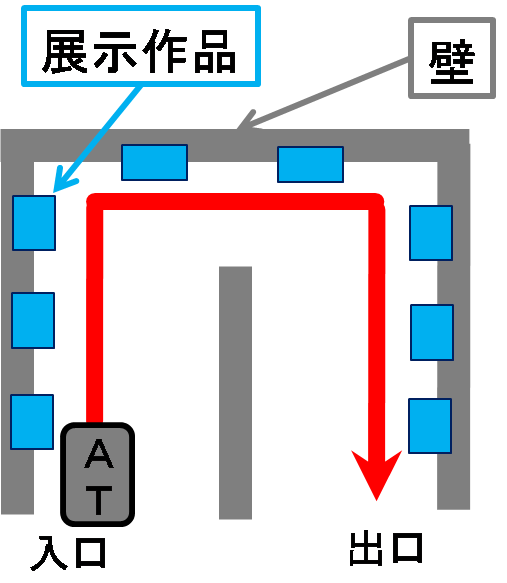
図4.14: 簡易美術館のフロアマップ
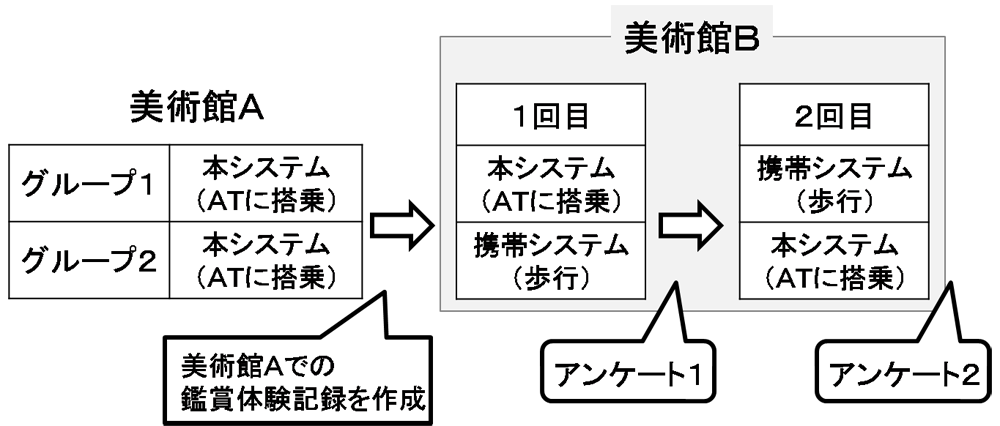
図4.15: 被験者実験の流れ
最初の美術館Aでの鑑賞体験記録に基づいて、次の美術館Bで鑑賞すべき作品の選出、鑑賞コースの生成を行った。最初の美術館Aでは鑑賞コース生成の指標となる体験記録が無いため、予め用意した3種類のコースから鑑賞コースを選択させた。すでに実用化されている、ガイドシステムを携帯しながら鑑賞した場合の体験と、本システムを利用してATに搭乗しながら鑑賞した場合の体験を、被験者に比較させるため、2つ目の美術館Bでは本システムを利用した場合と、持ち運びが可能な情報端末を持ち歩いた場合の計2回の鑑賞を行った。ただし、携帯システムでは過去の鑑賞体験を記録していないため、美術館Aで鑑賞した作品との関連に関する解説は携帯システムを用いた場合には行われない。また、美術館Aでの鑑賞時間、美術館Bでの2回の鑑賞時間は全て10分に制限した。
被験者実験の流れを図に示す。被験者10人を5人ずつの2つのグループ「グループ1」と「グループ2」に分け、美術館Bでの1回目の鑑賞体験で、本システムを利用した場合と携帯システムを利用した場合で鑑賞体験に差が現れるかを、アンケート(アンケート1)に基づいて調査した。「グループ1」の被験者は本システムを利用してATに搭乗しながら鑑賞を行い、一方「グループ2」の被験者は携帯システムを利用して情報端末を携帯しながら鑑賞を行う。その結果を次節の前半で示す。また、各被験者に本システムを利用した場合と、携帯システムを利用した場合の鑑賞体験の違いを評価させるため、美術館Bでの2回目の鑑賞体験では、「グループ1」と「グループ2」で体験に用いるシステムを入れ替える。すなわち、「グループ1」の被験者は携帯システム、「グループ2」の被験者は本システムを利用して、それぞれ鑑賞体験をする。そして、本システムと携帯システムの有用性を被験者10人に対するアンケート(アンケート2)で調査した。その結果を次節の後半で示す。また、図に本システムを利用した鑑賞体験の様子を示す。

図4.16: 簡易美術館での鑑賞体験の様子
4.4.2 結果と考察
4.4.2.1 本システムを利用した場合と携帯システムを利用した場合での鑑賞体験の比較
美術館Bで1回目の鑑賞体験が終了した直後に行ったアンケート1では、美術館Aに展示されていた8枚と、美術館Bに展示されていた8枚の計16枚の絵画のうち強く印象に残り、作品に関する感想を語ることができる作品の数を調査した。作品に関する感想を語ることができるということは、その作品を十分に鑑賞できたとして問題ないと思われる。アンケート調査の結果を図と表6に示す。図は被験者全員の結果をグラフで示したもので、表6は「グループ1」の被験者5人の平均と、「グループ2」の被験者5人の平均を比較したものである。図から、「グループ1」に属し、本システムを用いた被験者は全員が5枚以上の作品を十分に鑑賞できていることがわかる。一方、「グループ2」に属し、携帯システムを用いた被験者5人には、十分に鑑賞できた作品の数にばらつきが見られる。「グループ2」に属するID=10の被験者は、感想を語ることができる作品の数が7枚と「グループ2」の中で最も多かったが、この被験者は、1つ1つの作品を他の被験者より長い時間見ており、制限時間内で見た作品数は少ないが、見た作品全てに対して感想を語ることができると回答した。
また、表6で示したように、本システムを用いて鑑賞体験を行った「グループ1」の被験者5人が十分に鑑賞できた作品の平均数は6.2枚で、携帯システムを用いて鑑賞体験を行った「グループ2」の被験者5人が十分に鑑賞できた作品の平均数は4.2枚という結果が得られた。鑑賞時間10分で、十分に鑑賞できた作品の数に2枚の差があった。この結果から、従来のガイドシステムより、本システムを利用した方が、作品について様々なことを考え、様々なことに気が付く鑑賞体験ができる可能性が高いと考えられる。また、鑑賞体験を終えた被験者の感想では、携帯システムを用いた「グループ2」に属する被験者の1人が「全ての絵で“へぇ?”という感想をもっただけだった」と述べた。一方、本システムを用いた「グループ1」に属する被験者の中には「前に見たことのある絵との共通点が提示されると見方の幅が広がったように感じた」「前に見た作品について触れながら見ることができて、より良く作品について考えることができたと思う」という感想を持つ人がいた。
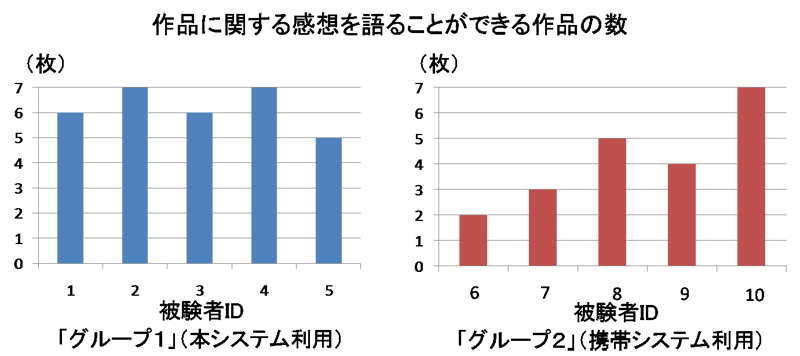
図4.17: アンケート1での調査結果
4.4.2.2 被験者によるシステムの有用性の評価
美術館Bで各被験者が本システムを利用した場合と、従来の情報端末によるガイドシステムを利用した場合の計2回の鑑賞を終えた後、全被験者に対して以下に示す4つの点をアンケート2に基づいて調査した。アンケート2の結果を以下に示す。
10人中9人が本システムを利用してATに搭乗した方が、情報端末を携帯しながら歩行するよりも充実した鑑賞体験に繋がる、見た作品に関して気付いたこと・感じたことが多かったと回答した。1.の設問で「どちらでもない」と回答した理由は、「歩行による鑑賞とATに搭乗して巡る鑑賞で、単純にどちらが良いかを比較できるものではない」であった。しかし、その被験者は「ATは私のコンシェルジュのような役割を果たしてくれていたので充実した鑑賞体験ではあったと思う」とも述べている。また、2.の設問で「いいえ」と回答した理由は、「歩行した方が多くの絵を見やすいため」であった。また、被験者全員が、本システムで選出した作品が過去の鑑賞体験との関連性を意識させる作品だったと評価した。4.の設問で「はい」と回答した4人中は3人は、美術館Bでの1回目に携帯システムを用いて、歩行して鑑賞するグループに属している被験者であった。制限時間を考慮すると、どの作品から見れば良いのか迷う傾向があることが分かった。
今回の実験から、限られた時間の中で最大限に充実した鑑賞体験をするための支援として本システムは有効であることが確認できた。しかし、今回の被験者が鑑賞体験を行った模擬美術館は非常に小さく、展示作品の数も少なかった。また、過去の鑑賞体験記録も1回分の蓄積しかなく、実験の方法が極めて限定的であった。ゆえに今後、実際の美術館と同程度の規模で再度有用性の評価実験を行う必要があると考えられる。
5 関連研究
本研究では、屋内を自動走行可能な個人用の知的移動体を用いて、実世界の美術館において、各利用者の過去の鑑賞体験を基にその人に適した巡回経路を自動的に作成し走行することで、利用者の鑑賞体験をより豊かにするシステムを提案し構築した。数多く作品が展示されている美術館で、各利用者に適応した作品を推薦したり、過去の体験に基づいて美術作品に関する知識を深めたりするガイドシステムは、本研究以外にも開発されている。また本研究では、知的移動体の屋内自動トランスポーテーションの機能を開発し、上記のシステムに応用した。本研究以外にも、人間の移動を移動体が支援する研究はいくつかある。ここでは、本研究の関連研究を、美術館における鑑賞体験支援・絵画推薦という観点と、安全に人間を目的地まで移動させる知的移動体という観点で分類し、それぞれについて紹介し、本研究との違いについて述べる。
5.1 美術館での鑑賞体験支援・絵画推薦に関して
5.1.1 CHIP (Cultural Heritage Information Presentation)
初めて訪れる大規模な美術館で、その美術館で展示されている作品に関してよく知らず、さらに美術館に滞在する時間が限られている利用者が、その美術館での鑑賞体験を最大限に充実させることを目的とした支援システム、CHIPの研究・開発がオランダで行われている。CHIPは、「美術館を訪れる前」「美術館に滞在中」「美術館を訪れた後」の3段階で利用者の鑑賞体験を支援する。「美術館を訪れる前」と「美術館を訪れた後」の支援はオンラインで行い、「美術館に滞在中」の支援は持ち運びが容易なPDAを用いて行う。以下に、各段階で行われる支援について説明する。
-
美術館を訪れる前
オンラインの仮想美術館で、これから訪れる予定の美術館で展示されている作品を事前に見て、実際に美術館を訪れた時に見たい作品を選択し、独自の観賞コースを作成する。利用者は、Webページで作品を見る度に、その作品を複数の観点から5段階で評価する。システムは、利用者の評価を蓄積することでユーザモデルを生成し、利用者が好む作品とそれに類似する作品を推薦する。
-
美術館を訪れた際は、入口で借りるPDAに、事前に作成した鑑賞コースの情報をダウンロードする。そして、PDAに提示される独自のコースに従って歩きながら作品を観賞する。鑑賞する際は、音声とテキストによる解説が得られる。また、実際の美術館で鑑賞した作品により、ユーザモデルを更新する。
美術館滞在中
-
実際の美術館で鑑賞した作品に関する、追加情報や類似作品の情報提示をWebページで行い、利用者の美術へのさらなる関心を引き付ける。
美術館を訪れた後
限られた時間の中で利用者の鑑賞体験を最大限に充実させるという目的に関して、CHIPの研究と本研究は似ているが、目的を達成するためのアプローチが異なる。本研究では、バーチャル美術館で事前に鑑賞したい作品を見つけ出すことは、美術鑑賞の初心者にとって困難であると考え、事前準備を必要とせずに利用者の観賞体験を豊かにする仕組みを考案した。それは、初心者の多くが美術作品に対する自身の興味を認識していないことが想定されるためである。
CHIPは美術館での観賞体験を豊かにするために事前準備を行うという考え方であるが、事前準備の段階で見る度に作品を評価することは利用者に対する負担が大きい。また、Webページで作品の画像を見ただけで観賞を終えてしまう利用者が存在する可能性も考えられる。ゆえに、本研究では事前準備や、利用者による明示的な評価を必要としない、現場での体験を重要視したアプローチを採用した。
5.1.2 ubiNEXT (ubiquitous and Networked Exhibition eXplorer Technology)
博物館や美術館などの利用者の学習体験を豊かにするために、ATRメディア情報科学研究所の高橋、益岡らが設計したubiNEXTと呼ばれる展示ガイドシステムがある。娯楽としての美術鑑賞ではなく、教養としての美術鑑賞を支援することに関して、本研究と類似している。高橋、益岡らの研究では、展示作品に関する複数の観点からの解説やクイズを、利用者に自主的・自発的に選択させることが、利用者の欲求や関心を促進させる最も意義がある学習体験であるとし、そのような学習形態を自由選択学習と呼んでいる。そして、自由選択学習を支援するシステムとして、ubiNEXTを開発している。
ubiNEXTはオンラインとPDAによる展示ガイドである。また、オンラインの仮想美術館における事前見学、実際の美術館での見学案内、帰宅後の見学日記による体験の振り返りの3段階で利用者の学習支援を行う。事前に仮想美術館で見学して、実際の美術館での独自の鑑賞コースを作成する。そして、美術館ではPDAを用いて案内を行い、見学後はオンラインで体験を振り返るという点では先に紹介したCHIPと同じである。しかし、ubiNEXTでは、作品を見る度に、利用者に対して作品に関するいくつかのキーワードを提示する。その中の1つを利用者が選択すると、そのキーワードが意味する観点からの解説やクイズが実施される。その後、利用者が選択したキーワードや、過去の見学履歴に基づき、次に見るべき作品の候補を最大3作品推薦し、次にどの作品を見るかを利用者に選択させる。また、この仕組みは仮想美術館だけでなく、実際の美術館でもPDAを用いて実現されており、事前に見学のための準備をしていない利用者も支援する。
高橋、益岡らは、実際の美術館で試験的な運用を行った。しかし、利用者は解説やクイズのためのキーワードの選択は行うが、推薦された作品に従って美術館の中を見学する人は少なく、順路に従い、全ての作品を順番に見ようとする人が多かったという結果となった。また、システムの宣伝を行ったにも関わらず、オンラインの仮想美術館を利用する人は少ないという結果も得られている。この試験的運用実験から、PDAで作品を推薦するだけでは、システムが、個人に適した順番で作品を提示したとしても、それに従う利用者は少ないため、あまり効果を発揮しないことが考えられる。
本研究では、高橋、益岡らが考える「新しい知識は、それまでの知識や経験に基づいて組み立てられるため、学習体験を豊かにするためには、学習における利用者の文脈に基づいた支援が重要である」という考え方を参考にした。一方、推薦に従って人間を移動させることができないというPDAの弱さを、搭乗型システムを用いることで改善した。
5.1.3 Indoor Navigationシステム
Bluetooth無線技術とPDAを用いた位置情報技術を応用して、NTTコムウェア株式会社の研究開発部が開発したシステムが、情報配信とともに位置情報表示サービスを提供するIndoor Navigationシステムである。このシステムは、アクセスポイントとPDAが自動的に交信して位置を計算し、利用者を目的の場所まで案内することができる。NTTコムウェアの研究開発部は、このシステムを博物館などの展示施設で用いられる電子ガイドシステムとして実用化した。
Indoor Navigationシステムは、現在のマルチメディアガイドシステムに位置認識技術を追加したことで、PDAを特定の機器に近づけることなく、持ち歩くだけで逐次現在位置が取得可能となった。また、経路誘導機能では、利用者が選んだ作品までの経路をPDA画面上で表示し、展示会場内での位置をPDA画面上で確認できる現在位置表示機能を備えている。施設内の全ての人がPDAを持ち歩けば、施設内における場所ごとの混雑状況の確認が可能である。Indoor Navigationシステムは、移動体を用いて本研究で構築したシステムと同等の機能が実現可能である。しかし、本研究で構築したシステムを利用した場合は、利用者が地図を見ながら歩いて移動する必要がなく、その行為に要する時間を展示作品の鑑賞に費やすことができる。また、移動能力に問題がある人も、そうでない人も、同じ方法で支援することができる。
5.1.4 注視点の検出に基づいた絵画推薦
絵画などの静止物の鑑賞においては、その静止物の鑑賞時間が興味の度合いを表す有用な指標になると考えられる。また、同じ絵の鑑賞においても、どの部分に興味を持ったかは、利用者によって異なってくることも予想され、絵画単位ではなく、その構成要素単位の興味を獲得することが推薦の精度を向上させる。このような考え方に基づいて、脇山らが開発しているシステムが、利用者が装着するカメラによる取得可能な視線情報から、利用者が注目している絵画の部分を暗黙的に取得するというものである。取得した絵画の部分により、利用者が見ている絵画のどの部分に興味があるのかを判別して、ユーザモデルを作成する。そして、協調フィルタリングにより、利用者の興味に適合する絵画の推薦を行う。
脇山らの研究は、暗黙的な手法で利用者の興味を推定するという点において参考にすべき点がある。しかし、このシステムでは、利用者は美術鑑賞を行うときに、視線認識を行うためのカメラを装着しなければならない。カメラは、直接的に美術鑑賞に必要なのではなく、それを装着することは利用者にとって負担となる。あるいは、比較的大きめのタッチパネルディスプレイに絵画の画像を提示し、興味を持った部分を利用者に指で触らせることで、利用者の自然な行為から、興味を持った部分を正確に取得できると考えられる。
5.1.5 装着型センサを活用したナビゲーションシステム
制限時間や混雑を考慮したナビゲーションシステムに、片山らが開発する装着型センサを用いたシステムがある。片山らの手法は、屋外のイベント会場でのスタンプラリーの参加者を対象とし、参加者の動作や状況、イベント会場で発生した混雑により、経路を動的に変化させ、制限時間内でラリーを終えるように経路案内をするというものである。美術館での鑑賞体験は実世界での活動であるため、当然時間による制限がある。ゆえに本研究でも、時間による制限を重要視しており、本研究で構築したシステムを実用化するためには、利用者の状況や、美術館で起こり得る混雑に応じて動的に鑑賞コースを変更する機能が必要となる。その上で、片山らの研究は参考にすべき点がある。
片山らのシステムでは、ヘッドマウントディスプレイ、カメラ、加速度センサ、GPS、ウェアラブルPCを装着して、歩行する速度を取得し、道に迷った、休憩しているなどの利用者の状態を推定している。ラリーのチェックポイントに到達すると、センサ情報の履歴と利用者の位置から次の経路での移動速度を予測し、残り時間を考慮して、次に向かうべきポイントと経路を算出するという仕組みである。本研究では利用者が移動体に搭乗して美術館内を移動するため、加速度センサやPCを身に付ける必要がない。また、利用者の移動速度を予測する必要もない。ゆえに、移動体を用いた方が利用者に対する負担を軽減した方法で、同様の仕組みが実現できる。しかし、本研究では、利用者に個人化した鑑賞コースを予め設定しているため、状況に応じて経路を変更する機能を実現するためには、さらなる工夫が必要である。
5.2 知的移動体に関して
5.2.1 知的車椅子
移動能力に障害を持つ人間にとって移動体は、その能力を補うことができる手段であり、電動車椅子はその代表的なものの1つである。しかし、従来の電動車椅子の操作性は必ずしも直感的でなく、利用者が自分の意図どおりの操作ができるようになるまでには多くの時間を要する。例えば、ジョイスティックを用いたインタフェースでは、搭乗者の姿勢や車椅子自体の特性などの要因から搭乗者の意図と実際の動きにずれが生じて危険を伴う可能性がある。高齢化社会の到来による身体の移動機能が低下した高齢者の増加に伴い、より安全で高機能性の電動車椅子の開発が望まれている。このような背景のもと、これまでより搭乗者の意思や周囲の環境に適応した動作が可能な知的車椅子の研究が行われている。
濱上らの知的車椅子では、事前に学習した障害物回避や壁沿い行動による移動時の搭乗者の操作負担の軽減や、他の知的車椅子と協調することによる道路の譲り合いや隊列成型といった協調行動の実現などを目指している。
濱上らの研究プロジェクトでは、車椅子を日常的に必要としている人を対象とし、動作を支援するものである。しかしATでは対象とするユーザを限定するのではなく、健常者や障害者という枠を超えて人間の移動及び情報処理能力を拡張することを目指している。またこの研究は、利用者の目的地までの安全な移動を支援するものであるため、利用者が目的地の場所や目的地までの経路を把握し、それに応じて車椅子の進行方向や動きを操作しなければならない。それに対して、本研究の自動トランスポーテーションシステムは、目的地の場所や目的地までの経路がわからなくても行きたいところへ安全に移動できる、ナビゲーションとしての機能も兼ね備えた仕組みになっている。
5.2.2 RCT (Robotic Communication Terminals)
「移動すること」を人間にとって最も基本的で意味のある要素の一つとして捉え、移動に必要な状況把握や情報アクセスを快適にすることを目指し、「人にやさしい情報通信移動システム」をテーマに立ち上げられた研究プロジェクトがRCTである。RCTは、障害者や高齢者のための移動支援システムとして、以下に示す3種類の端末で構成されている。
-
環境設置端末
複数個所に固定して設置される情報処理端末である。周囲の環境を監視し人間や車の有無などを判断する。さらにインターネットを用いた通信機能を備えているため、周囲の情報端末と通信を行い情報取得の補助をする。
-
ユーザ携帯型移動端末
人間が持ち歩く携帯型の情報端末で、通信により取得した周囲の情報をユーザの状態に合わせて提示する。提示には人間の視聴覚、さらには触覚を利用したインタフェースを取り入れている。
-
人間が搭乗して操縦することができる情報端末で、操縦系には利用者の障害に合わせて設計されたハンドル又はジョイスティックが装備されている。センサからの情報を処理した自動運転支援機能も装備されている。
ユーザ搭乗型移動端末
RCTプロジェクトは、人間の行動を構成する要素の中で「移動」に注目し、情報通信技術を利用して人間の活動を効果的なものにするという点で、我々のスタンスと類似している。特にユーザ搭乗型端末による、移動と実世界・情報世界からの情報取得、ユーザに合わせた情報の提示はATのコンセプトと似ている。この研究のユーザ搭乗型端末には、移動中の人間の不注意や操縦ミスによる事故を防止する機能はあるが、本研究の自動トランスポーテーションシステムのように、目的地を設定すれば自動でその目的地まで人間を移動させる機能は装備されていない。そのため、目的地へ行くためには人間が操縦して進むべき道や進行方向を決定しなければならない。しかしながら、このRCTプロジェクトには「人間」「移動体」「環境」が通信し合うことで、互いに衝突することを防止するという考え方において参考にすべき点が多い。
5.2.3 インテリジェント車椅子ロボットTAO Aicle
高齢化社会が進展すると、移動手段として車椅子を必要とする人の数が増えると予想される。車椅子には手動式・電動式など様々なタイプのものがあるが、利用者の利便性や安全性を向上し、介助者の負担を軽減するためには簡単な操作で自律的に移動可能な車椅子が必要である。そこで、畑瀬らの研究プロジェクトでは自律移動が可能なインテリジェント車いすロボット“TAO Aicle”を開発している。また畑瀬らは、愛・地球博のロボットステーション内の屋外デモコースにて実証実験運用を行った。
TAO Aicleの外観は通常の電動車椅子と同じであるが、それには位置認識のためのGPSアンテナや障害物回避のためのレーザレンジセンサが搭載されている。目的地設定は肘掛け部に搭載されたPDAの画面を操作して行い、走行中は車椅子の状態を搭乗者に画像と音声で伝える。TAO Aicleを自律移動させるためには車椅子の自己位置認識精度を上げなければならない。畑瀬らは、走行エリアの近くにGPS基準局を設置して相対測位を行い、さらに地面にRFIDタグを設置して絶対位置を取得するという方法でこの問題を解決している。RFIDタグを読み取るためのRFIDリーダは車椅子座面下に設置されている。また、TAO Aicleの自律移動は無線LANを通じて接続されているサーバにより実現されている。TAO Aicleは信号機のステータスをサーバから受信することで、信号機と連動した動作が可能である。
このTAO Aicleの自律移動の研究と本研究とは、設定した目的地まで自動で安全に人間を移動させるという点で同じである。またRFIDタグを測位のランドマークとし、センサを用いて障害物回避を行うという自律移動実現のためのアプローチも類似している。しかし、大きく異なるのは我々が開発したATは全方位に移動できるということである。TAO AicleはATのように横へスライドすることができないため、人や物などの障害物が急に近くに現れると回避しきれずに停止してしまうが、ATはそのような障害物も回避できる。さらに、TAO Aicleは測位にGPSを用いているため屋内での自律移動は難しいと考えられる。屋内での位置認識のためには壁沿い走行が有効で、そのためには全方位移動が最適である。
5.2.4 車椅子型自律移動ロボットDREAM-3
近い将来訪れる高齢化社会においては介護者の不足が考えられるため、高齢者や身体障害者が不自由なく生活するための新しい福祉技術の開発が望まれる。そのような背景で、大北らは車椅子型の自律移動ロボットDREAM号を開発している。DREAM号開発の歴史は15年以上で現在は4世代目のDREAM-4まで製作されている。その中でDREAM-3が全自動自律移動の機能を備えており、本研究のATによる自動トランスポーテーションシステムに類似している。
DREAM-3は全自動走行方式で、タッチパネル等で目的地を指示すれば、ロボットが環境を認識して目的地まで走行するものである。周囲の環境認識のための超音波センサ6個と、走行経路上に設置されている金属性のランドマークを読み取るための磁気センサ、他にジャイロセンサなどがDREAM-3に搭載されている。自動走行の際の位置認識には「環境マップ」と呼ばれる、PC上で1ドットが実世界の1cmと対応するように建物内の壁・柱・固定障害物の存在情報をあらかじめ書き込んだ地図情報を用いている。これは、電動車椅子が走行する場合に、エンコーダとジャイロセンサから取得した走行履歴によりPC上の車椅子モデルが環境マップ上で走行し、環境マップ上を走行する車椅子モデルが、走行経路を探索・決定するという仕組みになっている。途中で地図上には無い障害物をセンサで検知すると、それを地図上に書き込みを行う。
本研究とDREAM-3との類似点は、建物内において設定した目的地まで自動走行することである。しかし、その実現手法が異なる。1ドットを1cmに対応させる環境マップは将来広い建物での走行を考慮すると、作成に要するコストが大きい。またエンコーダから取得する値を積分して得られる走行履歴は、誤差が時間とともに増大してしまう可能性がある。ATは全方位移動が可能なため、屋内の比較的狭い経路での右折・左折をDREAM-3よりスムーズに行うことができる。
6 おわりに
6.1 まとめ
本研究では、既に効果的な鑑賞方法を熟知した美術の専門家ではなく、美術鑑賞の初心者を主な対象とし、屋内を自動走行可能な個人用の知的移動体を用いて、実世界の美術館において利用者1人1人の鑑賞体験を豊かにするシステムを提案・構築した。
美術鑑賞をすることで、我々は自身の感性や観察力を向上させ、潜在的な興味や関心を喚起させることができる。そのため、本研究では作品を見て頭を働かせ、様々なことを考える体験、様々なことに気が付く体験を豊かな鑑賞体験とした。そして、「新たな作品と出会った時に、頭の中に記憶されている画像ファイルから関連のある作品を検索して比較しながら見ることで、鑑賞の糸口を見つけることができる」という実際の美術館の学芸員による助言に基づき、初心者が豊かな鑑賞体験をするための支援として、実世界の美術館で、利用者の記憶に残っている作品と関連する作品を重点的に巡り、作品同士を比較する機会を増やす仕組みを構築した。その際に、美術館での鑑賞は実世界での行動であるため、時間的制約を考慮し、時間を有効活用する計画的な鑑賞体験を促す機能も実現した。
そのために、個人用知的移動体ATに屋内自動トランスポーテーションと呼ばれる機能を実装した。ATは、搭乗者である人間や、AT自身を取り巻く環境に適応し、通信によって協調的に動作することが可能な移動体である。さらにATは、駆動系にオムニホイールと呼ばれる複合車輪を用いて、全方位移動とその場回転が可能である。また、屋内自動トランスポーテーションとは、屋内において移動体が人間を乗せて自動的に走行し、搭乗者が設定した目的地まで安全に連れていくというシステムである。本研究では、壁との距離を一定に保って走行する壁沿い走行をすることで地図との対応を取りやすくし、位置推定のためのランドマークとしてRFIDタグを壁に設置することにより、屋内での地図情報に基づく自動走行を実現した。
利用者が予め設定した美術館滞在時間に合わせて、システムが生成した鑑賞コースを、ATが利用者を乗せて自動走行し、コース上のいくつかの作品の前で停止する。作品の前で停止中に、利用者は作品に関する解説を手元のディスプレイに提示される画像と、ヘッドフォンから流れる音声で視聴することができ、また気分や好みに応じて、自由に次の作品へATを進めたり、前の作品に戻したりすることも可能である。音声解説用のヘッドフォンに3軸角度センサを搭載したことで、常に利用者の頭の向きを取得し、その頭の向きとATの停止時間から各作品の鑑賞時間を計測した。鑑賞時間の長い作品は記憶に残りやすいという仮説に基づいて、これまでに訪れた美術館で長時間鑑賞し、記憶に残っていると推測される作品と関連する作品を、次に訪れた美術館で中心的に巡るコースを生成する仕組みを構築した。さらに、過去に鑑賞した作品と関連する作品の前で、どの作品とどのような観点で関連するのかを提示するようにした。
本研究では、構築したシステムの有用性を確認するために被験者実験を行った。被験者は、簡易的な模擬美術館で制限時間付きの鑑賞体験を、携帯情報端末を利用した場合と、提案システムを利用した場合の計2回行った。各回ともに鑑賞時間を10分に制限し、どちらが充実した鑑賞体験に繋がるかをアンケートに基づいて調査した。アンケートの結果、10人中9人が提案システムを利用してATに搭乗した方が、情報端末を携帯して歩行するより、充実した鑑賞体験をすることができた、見た作品に関して気付いたこと・感じたことが多かったと回答した。本研究で構築したシステムにより、利用者の過去の記憶と新しく出会った作品を結び付けることで、美術鑑賞の初心者でも、作品を見て様々なことを考えることや、より強く印象に残る作品を増やしていくことが可能となった。
6.2 今後の課題
6.2.1 実際の美術館での試験的運用
本研究では、構築したシステムの有用性を確認するために、簡易的な模擬美術館を準備し、そこで被験者実験を行った。今回、被験者実験を行った模擬美術館は、展示作品が8枚と非常に少数で、空間的にも非常に狭いものであった。そのため、美術館に展示されている作品を全て鑑賞したとしても、被験者が疲労を感じることはなく、美術館内で鑑賞する作品を限定する利点をあまり感じられなかった。今後は、全ての展示作品を解説を十分に聞きながら鑑賞すると数時間程度を要する程度の規模の美術館で、移動体を試験的に走行させてみる必要がある。
また、本システムは多くの美術館で導入され、様々な美術館で同じ人に利用してもらえなければ効果を発揮しないと考えられる。本研究で行った有効性を確認する被験者実験では、個人化の指標の取得に、模擬美術館での1回分の鑑賞体験記録を用いたのみであったので、本システムの有効性を正確に示すことはできなかった。展示作品数の多い実際の美術館で、なおかつ複数の美術館で、複数回の鑑賞体験記録を蓄積した後に、別の美術館で本システムを利用してもらい、再度、利用者による評価を調査する必要がある。同時に、本システムがその意義を発揮する美術館の規模や内容についても検討する必要がある。
さらに、1人の人間が複数の美術館を訪れても、その美術館に展示されている作品が全く関連の無い作品であっては、本システムは効果を発揮しにくい。ゆえに、利用者がこれまでに訪れた美術館に、展示されている作品と関連する作品が多く展示されている美術館自体を利用者に対して推薦する仕組みを導入することが望ましい。その仕組みにより、利用者は「多少遠くても、その美術館に行ってみたい」と感じるようになり、美術に関する興味や関心を持続、あるいはさらに深めていくと考えられる。
6.2.2 混雑緩和と動的なコース変更
本研究で構築したシステムが実際の美術館で実用化するためには、さらなるシステムの改善が必要不可欠である。その1つが、混雑への対応である。人気がある美術館や展示会では、多数の人が訪れ館内が混雑することが頻繁にあり、有名な作品の前にはいつも人が群がっているという状況が容易に想像できる。現状では、本システムは混雑した状況では対応できないため、改善しなければならない。今後は複数台の移動体が存在する状況と、移動体と歩行者が共存する状況に対応させる必要がある。
本研究では、搭乗者である人間を目的地まで移動させる屋内自動トランスポーテーションを、施設側に設置された地図サーバと移動体が通信して、移動体が地図サーバに現在位置を伝達し、サーバから経路と動作の指示を受けるという方法で実現した。この方法により、複数の移動体が存在する状況においても、施設側の地図サーバが全ての移動体の動作を管理することができる。この仕組みを活用することで、混雑の発生を未然に防いだり、待ち時間を有効活用するよう各移動体を走行させることが可能であると考えられる。
その場合には、鑑賞コースを動的に変更する必要がある。複数の利用者の鑑賞コースを美術館側のサーバが把握しており、それらの利用者がほぼ同時刻に同じ作品に到達する可能性を検知した場合、どの利用者を優先させるのかが問題となる。また、優先されなかった利用者は、時間を有効活用するために鑑賞コースを変更し、他の作品へ移動させることが望ましいが、その場合混雑のため未鑑賞のままとなっている作品に戻ってくるタイミングが問題となる。全員の利用者が、時間を有効的に活用し、かつ有意義な鑑賞体験をするためには、状況に応じてバランス良く、全ての利用者の鑑賞コースを振り分ける新たな仕組みを構築しなければならない。
6.2.3 興味推定のための鑑賞日記の導入
本研究では、教養としての美術鑑賞を支援することを目的とし、利用者が過去の鑑賞体験に基づいて、将来の鑑賞体験を豊かにする仕組みを構築した。しかし、「好きこそ物の上手なれ」という諺に示されるように、初心者に美術鑑賞を面白いと感じさせるためには、その利用者の興味がある作品や、嗜好に適合した作品を鑑賞コースの中に積極的に取り込んでいく必要がある。
また、本研究では鑑賞コースを個人化する指標として、過去に鑑賞したことを覚えている作品を用いた。それらの作品は、長時間鑑賞した作品は記憶に残りやすいという関係と、作品の前での停止時間から、暗黙的に取得することができた。このように、本研究では個人化の指標となる利用者の記憶や興味や意図を、利用者の明示的な評価ではなく、利用者の自然な行動の中から可能な限り暗黙的に取得することを目指している。それは、人間が生活する実世界と情報処理をより密接に結び付け、人間が意識しなくても必要とする情報を手に入れることができるようにしたいと考えているためである。
本研究においても、自動走行する移動体の作品の前での停止時間と、音声解説用のヘッドフォンに搭載した角度センサで取得する搭乗者の頭の向きから、各作品を鑑賞している時間を算出し、その時間と利用者の興味との関係性を推定した。しかし、鑑賞時間だけで興味を正確に推定することは非常に困難であった。そこで、利用者の興味推定の精度を向上させる手がかりとして、Web上で作成する鑑賞日記を導入していきたいと考えている。鑑賞日記とは、鑑賞した作品の画像に対して、利用者がコメントを付与するブログであり、コメント量に応じた興味推定の再計算に利用できると考えている。
美術館での鑑賞体験を終えて帰宅した時に、自身の体験を振り返ることは、利用者の鑑賞体験をさらに充実したものにするために有効であると考えられる。5章5.1節で紹介した、美術館での体験支援システムでも、事後の振り返りは重要であるとされ、訪れた美術館で鑑賞した作品の画像や解説が得られるようになっている。鑑賞体験を振り返る時に、鑑賞した時の感想を書き残しておくことは、利用者の将来の鑑賞体験をより豊かにすることに役立つと予想される。また、利用者が作品を鑑賞して、感想を書き残したいと考えたということは、利用者はその作品に興味があるということを意味すると考えられる。この指標を、各作品の鑑賞時間に加えて用いることで、本研究で構築した鑑賞コースを個人化するシステムは、個人により適応したものになっていくと思われる。
謝辞
本研究を遂行するにあたり、指導教員である長尾確教授をはじめ、数多くの方々に御支援、御協力を頂きました。ここに感謝の意を表します。
本研究を進めるにあたり、指導教員である長尾確教授には、研究に対する姿勢や心構えといった 基礎的な考え方から、研究に関する貴重な御意見、論文執筆に関する御指導など、大変お世話になりました。 心より御礼申し上げます。
大平茂輝助教には、研究に関することから技術的なことまで幅広く御指導、御意見を頂き、大変お世話になりました。心より御礼申し上げます。
土田貴裕さんには、ゼミ等で貴重な御意見を頂き、また、研究室の楽しい雰囲気づくりをしていただきました。石戸谷顕太朗さんには、研究に対する取り組み方や、基礎的な知識を身に付けるにあたり数々のご指導を頂きました。ここに御礼申し上げます。
森直史さん、井上泰佑さん、岸佳奈恵さんには、本研究を進めるにあたり絶対不可欠であるATに関する技術的な御指導や、研究やプログラミングに関する様々なアドバイスを頂き、様々な面で大変お世話になりました。ありがとうございました。
木内啓輔さん、小幡耕大さん、山本圭介さん、笠嶋公一朗さん、清水元規さんには、ゼミ等で貴重なご意見を頂いたことに加え、研究室における様々な活動の中で御世話になりました。ありがとうございました。
研究室OBである、増田智樹さん、尾崎宏樹さんには、研究室在籍中に、研究やプログラミングに関する御指導、御意見を頂き、研究室での活動の中でも大変御世話になりました。ありがとうございました。
長尾研究室秘書である鈴木美苗さんには、研究室生活や学生生活の様々な面でお世話になりました。ありがとうございました。
また、石井健一郎教授、鳥海不二夫助教をはじめ、石井研究室メンバーのみなさまには、実験場所として研究室前の廊下の使用を許していただき、ありがとうございました。IB電子情報館南棟3階の大西研究室、渡辺研究室のみなさまには、実験場所として共有スペースの使用を許していただき、ありがとうございました。心より御礼申し上げます。
最後に、影ながら見守っていただき、日々の生活を支えていただいた両親にも最大限の感謝の気持ちをここに表します。ありがとうございました。