
個人用知的移動体のための制御プラットフォームの開発
1 はじめに
我々は,AT(Attentive Townvehicle)と呼ばれる個人用知的移動体の研究・開発を行っている.ATは,搭乗者や自身を取り巻く環境に適応することで搭乗者を支援する,全方位移動,自動走行可能な個人用の乗り物である.
これまで運用されてきたATは,自動走行を行うときに単一のプロセスしか動作させることができなかったため,目的地に向かって走行しながら障害物回避を行うといった複合的な走行方法を取ることができないといった問題があった.
本論文ではこの問題を,サブサンプション・アーキテクチャを導入し,全ての動作を並行に動かすことによってこの問題を解決する.
2 個人用知的移動体AT
ATは搭乗者である人間や,AT自身を取り巻く環境に適応して移動する個人用の乗り物である(図 1 左参照).ATの最大の特徴の一つは,全方位に移動できることである.メカナムホイールと呼ばれる複合車輪を用いることによって,移動体の向きを変更することなく任意の方向に平行移動することができる.
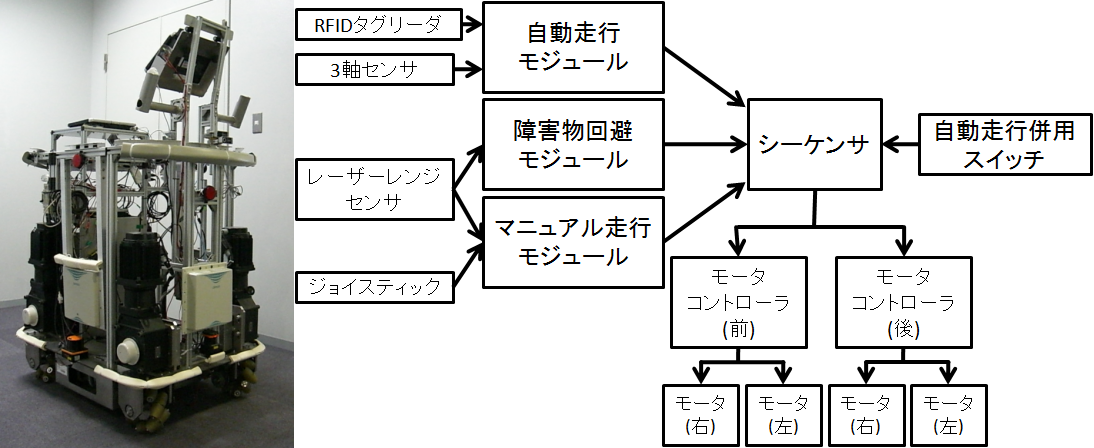
図1: 個人用知的移動体AT
システムの構成を図 1右に示す.今回,ATの制御基盤を再構築するにあたり,サブサンプション・アーキテクチャ (Subsumption Architecture)を導入した.これにより,自動走行,障害物回避,マニュアル走行のそれぞれをモジュールに分割することで,これまでのATの制御基盤では不可能だった,各モジュールの並行動作が可能になった.
この構造の詳細については次章で述べる.
各種センサはサーバになっており,どのモジュールからでもそのセンサのデータを取得することができる.また,各モジュールは直接シーケンサと接続されており,それぞれのモジュールが決定した動作をシーケンサに出力することができる.それぞれのモジュールは常に動作しており,常にシーケンサに対して非同期に出力を行っている.
ATにはPCが3台搭載されており,それぞれ,自動走行・マニュアル走行PC,障害物回避PC,コンソールPCとなっている.自動走行・マニュアル走行PC,障害物回避PCではATを制御するプログラムが稼働しており,コンソールPCでは,搭乗者に対する情報提示を行ったり,搭乗者が検索や目的地の設定を行うことができるプログラムが稼働している.
RFIDタグリーダサーバ,3軸センササーバ,ジョイスティックサーバは自動走行・マニュアル走行PCに,レーザーレンジセンササーバは障害物回避PC上で稼働している.
自動走行併用スイッチについては,3章で述べる.
3 制御プラットフォームの改良
3.1 以前のシステムの問題点
以前のシステムでは,自動走行を行う際,単一のプロセスしか動作させることができないことが問題となっていた.つまり,地図に従って自動走行を行っているとき,たとえ障害物が現われたとしてもその障害物を回避することができない.そのため,静止障害物の場合はレーザーレンジセンサで,移動障害物の場合は環境に設置されたセンサでそれを検知し,適当なタイミングで自動走行のプロセスを停止し,障害物回避を行うプロセスに切り替えて走行を継続した.このようにすることで目的地に向かいながら,目の前に現れた障害物を回避するという一連の流れを行っていた.
しかし,本来ならば目的地の方向に進むことと障害物を回避することは同時に行わなければならない.自動走行と障害物回避を切り替えながら走行した場合,レーザーレンジセンサで障害物を発見してから回避行動に移るまでに遅延が生じてしまう.
3.2 サブサンプション・アーキテクチャ
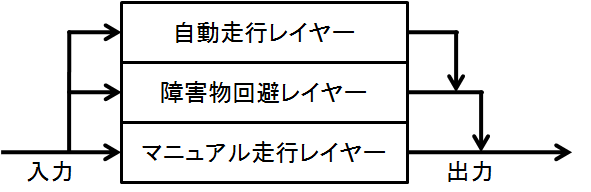
図2: レイヤーの構成図}
サブサンプション・アーキテクチャは,機能ごとにレイヤーに分割し,動作決定までに時間がかかる高位のレイヤーが動作を即時に決定できる低位のレイヤーを包摂するアーキテクチャである.ATでは,図 2 のようなレイヤーに分割した.
- 第1レイヤー:マニュアル走行 コントローラによって搭乗者の操作を受け付けるレイヤー.一定距離以内に障害物が存在した場合,停止や進路を自動調整する機能を持つ.
- 第2レイヤー:障害物回避 障害物を検知しそれを自動的に回避するレイヤー.
- 第3レイヤー:自動走行 地図に基づいて現在位置から目的地まで自動走行を行うレイヤー.
各レイヤー間にはネットワークが形成されており,高位のレイヤーは低位のレイヤーの出力を抑制,置換することができる.
サブサンプション・アーキテクチャは自律的に動作するロボットに対して適応される例が多いが,我々はこのアーキテクチャをATという人間が操作可能な乗り物に対して適用した.
ATにおけるサブサンプション・アーキテクチャの特徴は以下の通りである.
3.2.1 搭乗者の操作を受け付けるレイヤーが存在する
ATは乗り物であるため,搭乗者の操作を受け付ける仕組みが存在する.そしてそのレイヤーは3つあるレイヤーの一番下に位置している.これは,人間の操作という外部入力を受けてから行動を決定するまでの時間が短いためである.
また,障害物回避レイヤーの動作は,単純に止まる,避けるだけでなく,障害物を回避しながらも進行方向を意識し,なるべく目的地方向に向かえるような経路を選択しながら自動走行する.そのため,行動を決定するまでの時間が多少必要になるので,マニュアル走行のレイヤーよりも上位に位置している.
3.2.2 レイヤー内にスイッチング・順列の構造が存在する
同時に実現する動作は別のレイヤーで並行に動き,同時に実現できない動作は同じレイヤー内で選択的に,もしくは順列を持って現われる.地図に基づいて目的地まで自動走行をするという動作と障害物回避は同時に実現できなければならないため,異なるレイヤーで動作している.
しかし,屋内において,壁に近づく動作と地図に基づいて目的地まで壁沿いに自動走行するという動作は,先に壁に近づかなければならないという制約があるため,これらの動作は同じレイヤーに組み込まれ,順に動作する.
また,マニュアル走行レイヤーでは,通常は搭乗者が操作したとおりにATが動作するが,障害物が接近してきたときは搭乗者の操作に極力従いつつ障害物にぶつからないように進路を自動調節するモードに切り替わる.そのため,この2つは同じレイヤーに含まれている.この機能は,搭乗者が有効にするか,無効にするかを選択することができる.
レイヤーの内部構造については図 3を参照.
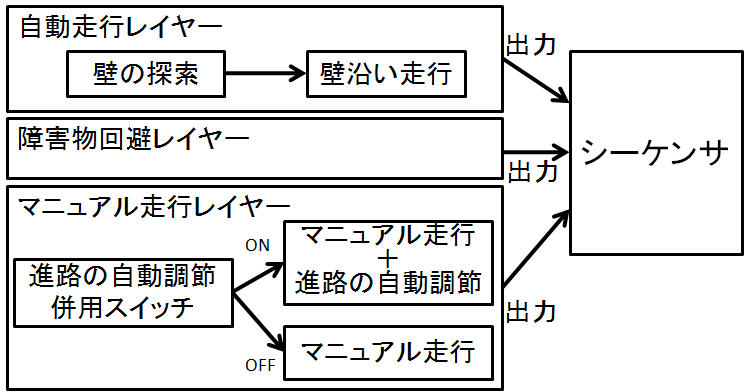
図3: 各レイヤーの内部構造
図 1右の自動走行併用スイッチはマニュアル走行と自動走行・障害物回避を併用するかどうかを決定するものである.スイッチを入れると,自動走行レイヤーは現在位置推定を開始し,障害物回避レイヤーは障害物探索を開始する.自動走行レイヤー,障害物回避レイヤーは,マニュアル走行レイヤーよりも上位であるため,自動走行,障害物回避を行うために十分な情報が与えられれば搭乗者の操縦よりも出力が優先される.しかし,ATは乗り物であり,搭乗者の意思を尊重する必要があるため,自動走行を必要としない搭乗者はスイッチを切り,マニュアル走行のみでATをコントロールすることができる.
4 まとめと今後の課題
本論文では,サブサンプション・アーキテクチャに基づくATの新たな制御基盤の概要を述べた.
改良されたシステムでは各動作モジュールの並列動作と,機能のスイッチングを両立させることができる.マニュアル走行時に自動走行・障害物回避を併用するかどうかや,進路の自動調整機能を有効にするかどうかは,搭乗者が選択することができる.一般の自律移動ロボットは,システムが状況に合ったモードを自動的に決めているが,ATは搭乗者が存在する自動走行可能な乗り物なので,搭乗者の意思を尊重するシステム設計になっている.これは個人用の移動体のシステムとして最適な仕組みだと思われる.
将来的には複数台のAT間の通信や協調行動を扱うため,本論文で述べた基盤に新たなレイヤーを付加する必要がある.そのレイヤーをどのように実現するかについては今後の課題である.