
小型無人移動体による障害物の探索と個人用知的移動体との連携
1 はじめに
近年,ハンディキャップを持たない人を含む一般の個人の移動を支援する,パーソナルモビリティの必要性が高まっている.
パーソナルモビリティは個人用の乗り物であるが,自転車やバイクとは異なり,搭乗者に適応し,安全に自動走行可能であることが望まれる.そこで,それらを実現するために個人用知的移動体の技術が必要となる.個人用知的移動体とは,歩行者との衝突を回避するような知的移動体と,電動車椅子やバイクのような個人移動体の両方の性質をもつ乗り物のことであり,搭乗者や自身を取り巻く環境に適応することで,搭乗者の行動を支援することができる.筆者が所属する研究室では,個人用知的移動体の具体例として,AT(AttentiveTownvehicle) と呼ばれる個人用知的移動体の研究・開発を行っている.
AT には,自動走行中に障害物に遭遇した時にそれを回避する機能を持つ.しかし,障害物は必ずしも避けられるものとは限らない.小さな障害物が置いてあるだけの場合は,回避行動によってその障害物を越えることができるが,移動体が通行できないほどに空間を塞いでしまった場合は,AT は別の経路を使って目的地に向かわなければならない.壁や階段など,あらかじめ通れないとわかっている場所は,経路設定に考慮されるが,経路設定時に存在せず走行中に一時的に現れるような障害物を考慮することはできない.このような障害物が現われた時に早めに経路を再設定するための情報をAT 単体では取得することができない.そのため,AT の外部にそのような情報を取得する仕組みを用意しなければならない.
本研究では,プローブカー的な役割を果たす自律移動可能な移動体を導入することによって,AT の自動走行の効率化を実現する.
2 個人用知的移動体による自動走行とその問題
われわれは,人間の生活において最も基本的で重要な要素の一つである「移動」に着目し,人間を物理的に移動させることが可能な移動体そのものを情報端末とするという発想で,人間の「移動」と情報処理との新たな関係を見出そうとしている.そこで,われわれはAT(Attentive Townvehicle) と呼ばれる情報端末化された個人用知的移動体を設計・開発している.
AT は搭乗者である人間や,AT 自身を取り巻く環境に適応して移動する個人用の乗り物である(図 参照).AT は,周囲に障害物が多い場合に移動方向や速度を自動的に調整して安全な走行を支援したり,現在位置や移動履歴を考慮して搭乗者に適した情報を能動的に提供したりすることが可能である.このように,搭乗者である人間は,特に意識することなく,実世界状況や文脈に合わせて,その時点で最適なサービスを受けることができる.
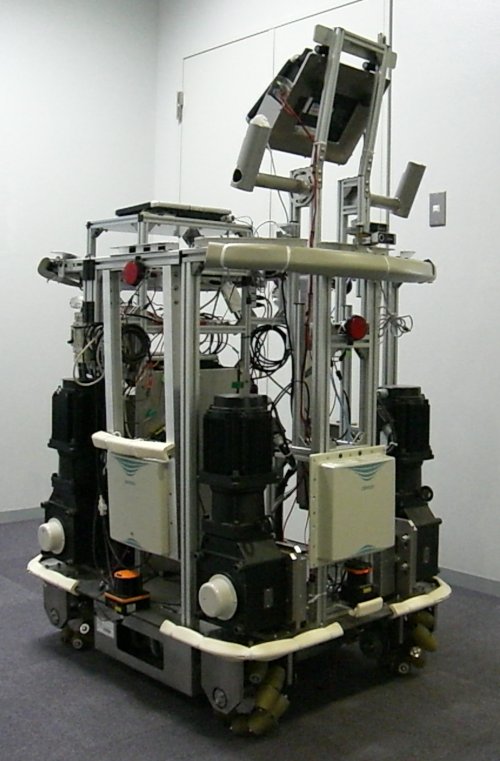
図1: 個人用知的移動体AT
AT は,メカナムホイール(図 参照) と呼ばれる車輪を用いて全方位移動することが可能である.全方位移動のメリットの一つは,障害物の回避方法である.これまでの乗り物は,止まっている状態から真横に動くことができないため,障害物や人間が乗り物の間近に接近してしまうと回避しきれず衝突してしまう.メカナムホイールならば,AT は本体の向きを変えずに任意の方向へ移動できるため,障害物や人間が接近している場合でも衝突することなく安全な回避を行うことができる.

図2: メカナムホイール
2.1 制御基盤
2.1.1 サブサンプション・アーキテクチャ
AT はサブサンプション・アーキテクチャ 1) と呼ばれるアーキテクチャに基づいて設計されている.サブサンプション・アーキテクチャは,機能ごとにレイヤに分割し,動作決定までに時間がかかる高位のレイヤが, 動作を即時に決定できる低位のレイヤを包摂するアーキテクチャである.
2.1.2 レイヤの構成
AT における制御システムの全体図と,レイヤ構造を,図 に示す.
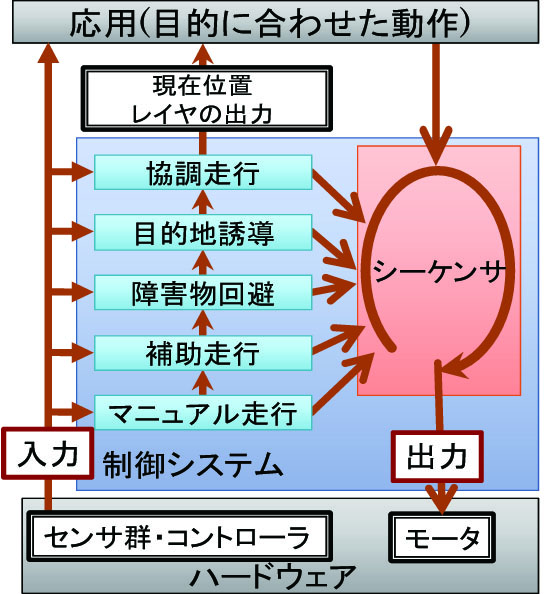
図3: レイヤの構成図
ここでは,センサ・コントローラ入力からモータへの出力までのメカニズムについて解説する.まず,各レイヤはセンサ等からの入力を受け,それを基に動作を決定する.その際,下位のレイヤの値を参照することができる.
その後,各レイヤは非同期に値をシーケンサに対して出力する.シーケンサは常に各レイヤからの入力を観察しており,同時に入力された値の中で,最も上位のレイヤの値をモータに出力する.
-
第1 レイヤ:マニュアル走行
-
第2 レイヤ:補助走行
-
第3 レイヤ:障害物回避
-
第4 レイヤ:目的地誘導
-
第5 レイヤ:協調走行
各レイヤ間にはネットワークが形成されており,高位のレイヤは低位のレイヤの出力を抑制,置換することができる.各レイヤが並列動作をしており,状況に応じて動作に反映されるレイヤが変わる.また,これらのレイヤのさらに上位のレイヤとして,目的別の機能を実装することができる.この機能は,個人用知的移動体を用いた場面に応じて置き換えることができる.例えば,個人用知的移動体を美術館案内に利用したい場合は美術館案内の機能を実装したレイヤを追加すればよく,体験共有に用いたい場合は,体験共有の機能を実装したレイヤを追加すればよい.このように,多用途性を実現することができる.
サブサンプション・アーキテクチャは本来,自律移動を行うロボットに対して適用されるが,個人用知的移動体のような乗り物に対して適用する場合は,いくつかの工夫が必要になる.
本制御システムでは,レイヤの有効・無効を切り替えることで,個人用知的移動体の制御方法を切り替えることができる.その仕組みを利用し,本システムでは以下の3 種類の制御方法を提供しており,搭乗者はその中から好きな制御方法を選択することができる.
-
自動走行:
-
操縦支援付きマニュアル走行:
-
マニュアル走行:
2.2 屋内自動トランスポーテーション
AT によって搭乗者を自動的に目的地に移動させる仕組みを開発した .自動走行では,地図を取得して目的地を検索し,地図に基づいて走行する.この屋内地図情報は,AT 自身が常に保持しているのではなく,地図サーバと呼ばれる建物ごとに用意されたサーバが管理している.AT は建物の入り口を通過する時に,その建物の地図サーバと接続し通信を開始する.それ以降建物内にいる間AT は,常に地図サーバと通信可能な状態を維持し続けるが,AT が建物から外へ出た場合,その通信を切断する.また,地図サーバは建物内にいる全てのAT と通信し,全てのAT の動きを把握することが可能である.
AT は定期的に地図サーバに自身の位置情報を送信し,必要な時に周辺地図情報の取得要求を送信する.搭乗者が目的地を設定した場合,目的地の位置情報と目的地までの経路・動作情報の取得要求を送信する.地図サーバは,各AT からの要求に応じて地図情報や経路・動作情報を送信する.
AT は壁に沿って走行することで現在位置と地図との対応を取る.そのため,最大距離30m, 270 度(センサ正面から左右に135 度)の範囲で,物体までの距離を測定可能なレーザレンジセンサ4 個をAT の前後左右に搭載し,壁との距離を常に一定に保ちながら走行する壁沿い走行を実装した.また,位置認識の目印として,軽量で電源を必要としないRFIDを壁に設置した.地図上の,RFID を貼った位置に対応する地点にタグと同じID を付与することにより,AT がタグを読み取ることで現在位置や地図上の地点を知ることができる.
また,目的地に向かって走行している時に障害物と遭遇した場合,AT に搭載されているレーザレンジセンサによって障害物を認識し,障害物回避を開始する.2.1.2 節で述べたレイヤのうち,目的地誘導レイヤでは地図に基づいて走行するという処理を実行しており,障害物回避レイヤでは障害物の探索,回避行動のための処理を実行している.通常時は目的地誘導レイヤの処理の実行が優先されているが,障害物を認識した場合は障害物回避レイヤの処理の実行が優先される.
2.3 屋内自動トランスポーテーションの問題点
AT は,目的地に向かって自動走行している間に障害物と遭遇した場合,回避行動をとることによって障害物を避け,目的地に接近することができるが,障害物は必ずしも避けられるものとは限らない.例えば,荷物の搬入などで通路が一時的に塞がれてしまっていたり,混雑によって移動体が通行できない状態になってしまったりする場合もある.
このような障害物は一時的に現れるものであるため,壁や階段のようにあらかじめ環境地図に通行できない旨を記載することができない.それゆえ,AT の自動走行の経路を構築する段階では環境地図に通行できないと記載されていない可能性があるため,結果的に通行できない場所を通るような経路を構築してしまう場合がある.AT が自動走行中にこのような障害物に遭遇した場合,回避行動を取っても回避することができないため,もと来た道を戻って経路を変更することになる.これでは搭乗者にとって時間の無駄になってしまう.そのため,自動走行中であっても通行できない通路を避けるように走行経路を変更しながら目的地に向かう必要がある.しかし,このような一時的な通行止めの存在は,AT 単体では知ることができない.そのため,AT の外部に通行止めであることを走行前に検出する仕組みが必要となる.
次の章では,この問題点を解決するために導入された小型無人移動体について述べる.
3 小型無人移動体による障害物の探索
本章では屋内自動トランスポーテーションの問題点を解決するために,AT とは別に障害物を検出することができる自律移動が可能な小型無人移動体について述べる.
3.1 小型無人移動体
本研究で用いる小型無人移動体(以後:SUV (Small Unmanned Vehicle) と呼ぶ) の外観を図 に示す.

図4: 小型無人移動体 (SUV)
SUV はベースにiRobot 社の製品「iRobot Create」を使用している.ノートPC,各種センサを搭載することで機能を拡張している.センサとして,レーザレンジセンサ,RFIDタグリーダ,赤外線カメラ,デコーダが搭載されており,障害物の認識や回避,現在位置の認識,AT の認識等を行うことができる.これをAT とは基本的に独立に走行させ,移動型センサとして障害物の探索を行わせる.
本研究では,環境側に配備するセンサとして環境設置型のもの を使用せず,自律移動可能な移動体にセンサを取り付けたものを使用している.
従来の環境設置型センサに対する利点として,AT に搭載されたセンサと同じ高さから障害物を検出できることが挙げられる.AT と同じ目線の高さにセンサを配備することによって,AT にとって有用な情報を多く取得できると考えられる.従来の環境設置型センサをAT と同じ高さになるように設置した場合,障害物などによってセンサの視界が遮断されてしまう恐れがあるが,SUV は自律走行が可能なためそのような障害物を回避して探索を続けることができる.また,環境設置型センサによって建物内の広い範囲の状況を把握しようとした場合,大量のセンサを設置しなければならなくなるが,SUV は環境設置型センサに比べて少ない台数で建物内の広い範囲の状況を移動しながら把握することが可能である.
3.2 障害物の探索
SUV は基本的にAT とは独立して動作しており,壁を目印にしながら走行している.SUVにもRFID タグリーダが搭載されており,AT と同じ仕組みで現在位置を知ることが可能である.
SUV には最大距離4m,240 度(センサ正面から左右に120 度)の範囲で,物体までの距離を測定可能なレーザレンジセンサを前面に搭載されており,これによって障害物を検出することが可能である.SUV が障害物を検出すると,まず障害物によって狭められている通路の幅を測定する.移動体の大きさによっては障害物によって遮られていない場所を通れる場合があるため,障害物が存在するからといってすぐに通行止めになると判断するわけではない.
測定方法は,図 のように,レーザレンジセンサで認識できる範囲で障害物に遮られていない場所で幅が最も狭い場所を探し,そこを計測する.図 左のような環境でレーザレンジセンサによる距離測定を行った場合,図5 右のような点を取得することができる.図 右の点は,レーザレンジセンサによって検出された壁や障害物を表す.
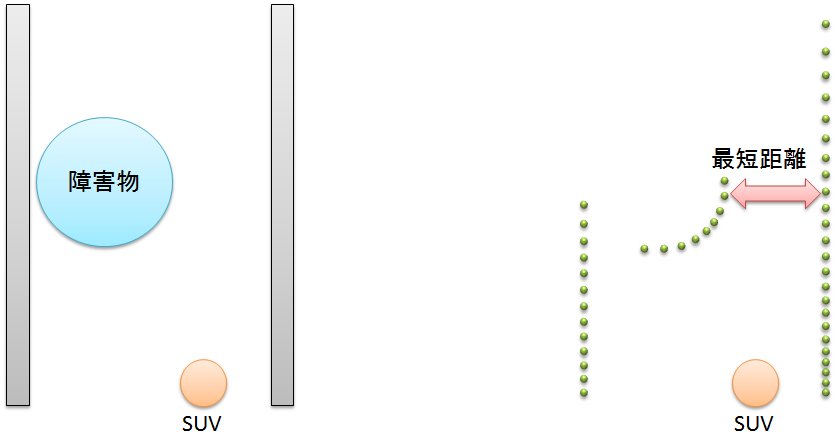
図5: 通路上に障害物があった場合(左) とそのときにレンジセンサで取得したデータ(右)
4 個人用知的移動体と小型無人移動体の連携
4.1 地図サーバを介した移動体間の連携
個人用知的移動体と小型無人移動体の連携を行うための通信形態を図 に示す.
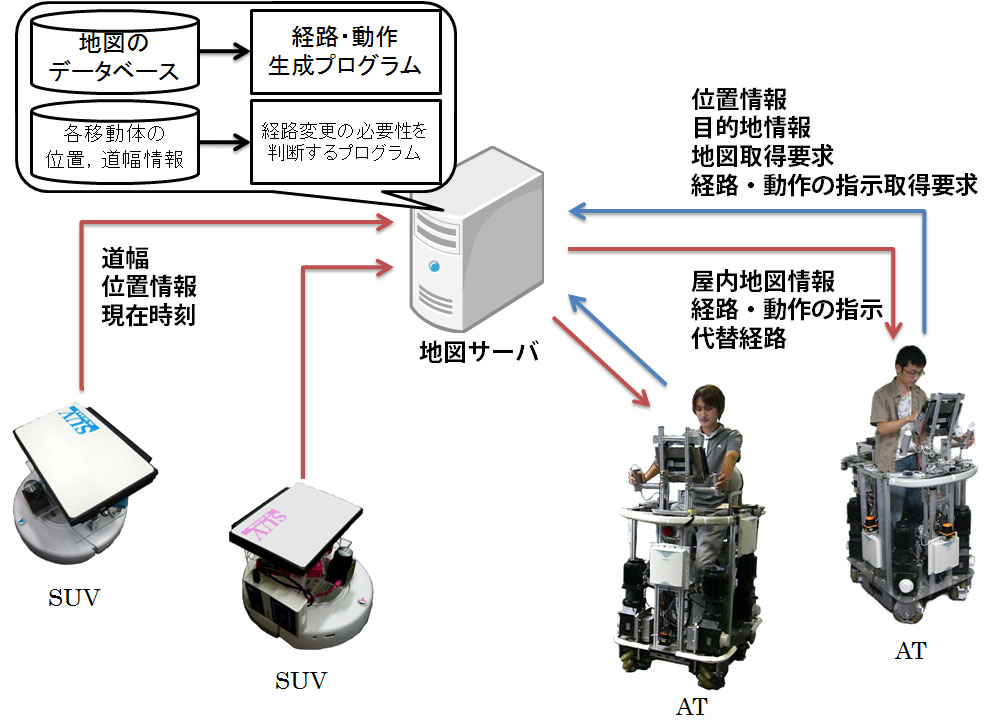
図6: AT,SUV,地図サーバ間の通信
地図サーバは,AT からの地図情報や経路・動作の指示要求があると地図のデータベースを基に経路を計算してAT に地図情報や経路・動作の指示情報を返信する.
また,地図サーバは建物内を走行している移動体のIP アドレスや現在位置等を保持しており,移動体がRFID タグを読み取った時に地図サーバに情報を送信すると,地図サーバ内に保持されている,該当する移動体に関する情報が更新される.他にも各AT の自動走行経路や車体の幅といった情報も保持しており,SUV から送られてきた道幅に関する情報を用いて,各AT ごとに自動走行の経路を変更すべきかどうかといったことを判断することができる.AT の搭乗者が目的地を設定した時に,AT は地図サーバに対して現在位置と目的地を送信するので,地図サーバはその2 点を結ぶ経路を全て求める.それらをそのAT が走行する経路の候補とする.
図 に例を示す.図 (a) のような地図があり,現在地を点A,目的地を点B とする.ここで点A から点B まで同じ道を通らずに移動するためには,図 (b),図 (c),図 (d) という3 通りの行き方がある.これらの候補の中で現在位置から目的地までの距離がより短く,かつ通行できない通路を経由しない経路,ここでは(b) を自動走行するために使用する経路として採用する.その後,この経路に関する情報とどのような手順で目的地に向かうかという動作情報をAT に送信する.選択されなかった経路,ここでいう(c) と(d) は,選択された経路(b) が通行止めによって走行できなくなった時の代替経路とし,地図サーバ内で保持する.
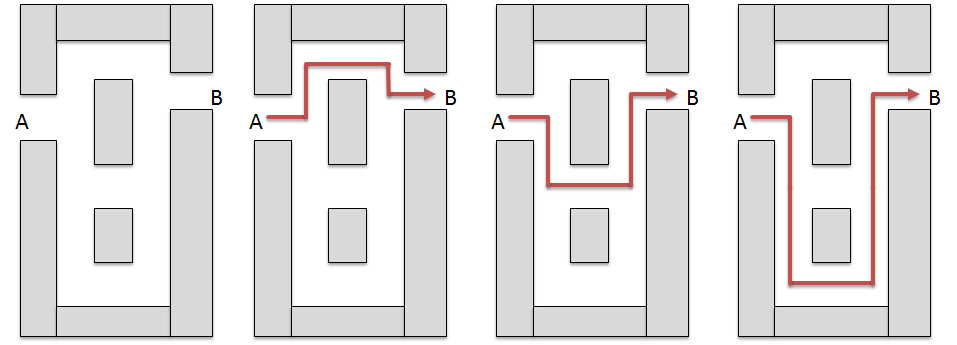
図7: 地図の例(a) と点A から点B に移動するための経路の候補(b)(c)(d)
4.2 個人用知的移動体の自動走行の動的変更
地図サーバは,経路の道幅に関する情報が更新された時に,各AT についてその車幅と自動走行経路の各地点の道幅を比較し,その中に車幅よりも狭い道幅になっている場所が一か所でも存在した場合,地図サーバはそのAT に対して自動走行経路の変更の通知を行う.この時にAT が経路変更可能な状態だった場合,つまり,即座に経路変更の手続きをしても安全な場合は,すぐに地図サーバはAT に代替経路を送信し,自動走行経路を変更する.経路変更不可能な状態,例えば,障害物回避中や,交差点進入時など,その場で経路変更を行うと危険な場合は,その動作が終わり,次に壁沿い走行に移行した時にAT は自動走行を中断し,地図サーバに対して経路の要求をして代替経路を送信してもらう.
以上のような仕組みで,AT に搭載されているセンサで検知できない場所に障害物が突然現われて経路が通行できない状態になったとしても動的にAT の自動走行経路を変更することができる.
実際にこの仕組みを使ったときの様子を述べる.図 は実際にこの仕組みを利用し,動的な経路変更を行ったときのAT のコンソール画面である.丸で囲まれた矢印はAT とその進行方向を表し,番号付きの正方形はRFID タグを表す.図 (b)(c) の5 番タグは通行止めであることを表す.太線はAT の自動走行経路を表す.
図 (a) で,AT は 8 番タグから3 番タグに図のような経路で向かっている.その後,SUVが5 番タグの前を走行した際に道幅を測定し,地図サーバに通知したところ,地図サーバはAT にとって行き止まりであると判断したため,AT に対して経路変更の通知を行った.その結果,図 (b) で5 番タグが通行禁止状態になり,経路が変更された.そして,図 (c) ではAT が5 番タグ,つまり,通行止めになっている場所に到達する前に経路を変更して目的地に向かっている.
ここで問題となるのは,経路上に障害物が現われた時にその情報を常に事前に地図サーバに通知できるかどうかということである.この問題に対する明確な解答はまだ見つかっていないが,一つの解答としては,地図サーバは全てのAT が走行する経路を把握しているため,その経路上を重点的にSUV に探索させることによってAT にとっての情報の鮮度を上げて自動走行の障害となるような通行止め状態の通路を発見しやすくなるという方法が考えられる.
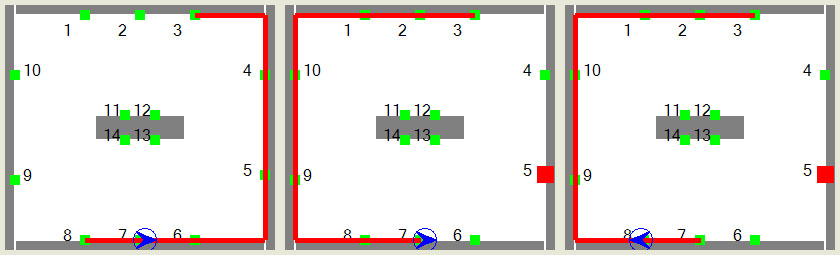
図8: (a) 最短距離で目的地に向かっている,(b) 通行止め通路の発生により経路変更を行った,(c) 変更後の経路を 走行している
5 おわりに
本論文では,サブサンプション・アーキテクチャに基づく個人用知的移動体AT の制御アーキテクチャの概要,また,AT による屋内トランスポーテーションの概要とその問題点について述べ,その問題点を解決する方法として小型無人移動体との連携について述べた.
環境地図に基づいて自律走行する個人用知的移動体は,自身のセンサが届かない範囲の情報を取得することができないため,自律移動が可能な小型無人移動体を走行させ,環境地図を動的に更新することにより,個人用知的移動体は最新の情報を得られるため,効率的な自動走行を実現することができる.
小型無人移動体との連携について,環境設置型センサと比べて同じ範囲を監視するのにかかるコストの比較や,探索するのに最適な面積当たりの小型無人移動体の台数などを検討する必要がある.