
セラピー向けロボットの開発およびそのビヘイビアの共有と再利用に関する研究
概要
ロボット介在活動(Robot Assisted Activity. 以下ではRAAと表記する)は、ロボットとの関わり合いによって人間の健康の質を向上させる医療行為である。近年、ペット型ロボットを用いたRAAの研究が盛んに行われており、精神的、社会的または生理的な治療効果が多数報告されている。本論文の目的は、RAAに効果的なコミュニケーションロボットを開発することである。その目的のために、われわれはRAAの歴史と現状を踏まえ、RAA向けのテディベア型コミュニケーションロボットを試作した。また、試作したロボットを用いて、認知症高齢者を対象にRAAを行ったところ、健康状態の改善を確認した。
RAAに用いるコミュニケーションロボットの開発にとって、ロボットとユーザのインタラクションを規定するプログラム(ビヘイビア)を設計することは重要な問題である。RAAを通して得られた知識をビヘイビアに反映させることで、より効果的なロボットにすることができるだろう。しかしRAAの実施者は必ずしもロボットの専門家とは限らないため、われわれはビヘイビアを容易に設計するためのビヘイビアエディタを開発した。ビヘイビアエディタではロボットのビヘイビアはコンテンツの一種として扱われ、既存のコンテンツのように、オンラインで共有することができる。そして複数のビヘイビア設計者によるビヘイビアの協調的な作り込みを支援する。また、共有されたビヘイビアを再利用することができ、これにより、より効率的なビヘイビア設計を行うことができる。
また、提案手法におけるコンテンツ共有の効果を、被験者実験によって評価した。この実験では被験者を、ビヘイビアコンテンツの共有と再利用を行うグループと、行わないグループに分け、ビヘイビアコンテンツを作成させた。作成されたビヘイビアコンテンツの定量的評価およびアンケートの結果から考察したところ、共有と再利用を行ったグループではより効率的に、より質の高いビヘイビアが作成されたことが確認できた。
はじめに
背景
0..1 ロボット介在活動(RAA:Robot Assisted Activity)
ロボティクス研究の進歩により、近年、ますますロボットは人間と密接な関係を築いてきている。現在最も実用的に用いられているロボットは、工場などで作業を行う産業用ロボットだろう。現在、産業的に実用化されているロボットの主な能力は、人間にとって単調な作業、危険な作業への適応性などの、原始的な能力に過ぎない。一方で、人間や動物のようにふるまい、人間と対話を行い、人間と同等かそれ以上の知能や能力を持つようなロボットが、古くから小説や映画、アニメーション作品などで描かれてきた。人間とともに生活、共存し、ときには人間を助けてくれるような、より身近な存在としてのロボットの登場は社会に大きく期待されている。その代表的な例としては、1999年にソニー株式会社が商品化した犬型のペットロボットAIBOが挙げられる。
ペットロボットの存在は、動物介在活動(Animal Assisted Activity. 以下ではAAAと表記する)の現場からも注目されている。AAAは、何らかの疾患を持った患者が動物とふれあうことで、精神的、社会的または生理的な治療効果を得るものである。AAAでは、患者に危害を加えないように動物をしつけたり、衛生上の問題も配慮したりする必要があるなど、生きた動物特有の問題が生じる。そこで、動物の代わりに、AIBOやPAROといったペットロボットを用いたロボット介在活動(Robot Assisted Activity. 以下ではRAAと表記する)が考案され、その治療効果が報告されている。
本論文ではこのRAAに着目し、RAA用のロボットの開発を通して、RAAにとって効果的なロボットとはどういうものか、また、そのようなロボットを実現する方法論はどうあるべきかという観点について論じる。
0..2 コミュニケーションロボット
前節で挙げたような、ペットロボットなどの人間とコミュニケーションを行うこと自体を目的とする知能ロボットを、ここではコミュニケーション指向ロボット、あるいはコミュニケーションロボットと分類する。コミュニケーションロボットのタスクは、ロボット単体で完結するものではなく、常にコミュニケーションの相手である人間と互いに関わり合うことで初めて成立する。そのため、ロボットの設計の際には人間を含んだシステムとして設計するべきである。同じ人間でも大人と子供の間では認知能力やコミュニケーション能力に差があるが、人間とロボットの間ではその差はさらに大きい。現在の人工知能技術ではロボットの知能を人間と同程度のレベルにすることはできない。その差を補い、質の高いコミュニケーションを成り立たせるには、ロボットから人間へ働きかけるだけではなく、人間がロボットの知能レベルに適応し、ロボットの不備を補わなければならない。つまり、ロボットの側には、人間の積極的な歩み寄りを引き出すための工夫が必要となる。
コミュニケーションの妨げとなる要因の一つに、いわゆる「飽き」の問題がある。コミュニケーションロボットは、ユーザからの働きかけに対して、何らかのリアクションを行うことでコミュニケーションを成立させている。リアクションの引き出し方やリアクションが単調で変化しない場合、ユーザはコミュニケーションに対して飽きを感じると考えられる。「飽き」の現象は、古典的には、Watsonによる、乳児を被験者とした実験において考察されている。Watsonは実験の中で、ある複雑な操作を行うことで回転するおもちゃを乳児に見せ、乳児がその操作を学習する過程を観察した。実験では、乳児は操作を学習してしまうと、それに満足してしまい、おもちゃで遊ぶことはしなくなったのである。スイッチとなる操作を別のものに変更すると、また乳児はおもちゃを回転させようとおもちゃで遊び始めた。この現象が示しているのは、乳児のおもちゃに対する``飽き''であるといえる。これは対象(ここではおもちゃ)のリアクションの引き出し方が変化しないことが、ユーザの興味を失わせているのである。これをロボットに置き換えると、ユーザがコミュニケーションのパターンをひととおり学習してしまうことにより、ユーザからの積極的なコミュニケーションを引き出しにくくなるという可能性を導くことができる。
以上で挙げた例をまとめると、適切なビヘイビアがロボットに組み込まれていないことは、ユーザとロボットのコミュニケーションを妨げることがあるといえる。ここでビヘイビアとは、ユーザからの働きかけに対してモータ、あるいはスピーカなどのハードウェアを用いたリアクションを行うプログラムのことを指す。コミュニケーションロボットでは、ビヘイビアを設計することは、すなわち、ユーザとのインタラクションを設計することである。そのため、いかに適切なビヘイビアを組み込むか、という問題はコミュニケーションロボットにとって重要な観点である。
0..3 ビヘイビアの設計に関する問題
前節では、コミュニケーションロボットには適切なビヘイビアを組み込むことが重要であると述べた。この観点を考察すると、以下の問題が導かれる。
-
適切なビヘイビアとは何か
-
どのようにしてビヘイビアをロボットに組み込むか
適切なビヘイビアが何か、という問題は、ビヘイビアを組み込むロボットに強く依存しており、一般的な解は無い。しかし、コミュニケーションロボットにおいては、適切なビヘイビアというものがコミュニケーションに有効なビヘイビアを指しているということは明らかである。ビヘイビアがコミュニケーションに有効かどうかを検証するには、実際に被験者実験を行う必要がある。また、コミュニケーションロボットの性質上、その設計には明確な正解がなく、完成形がない。以上の理由から、コミュニケーションロボットの開発手法としては、運用を行いながら、適宜改良を加えていく手法が望ましい。さらに、そのような開発手法を取り入れるためには、ロボットの側が、ビヘイビアの動的な変更を受け入れられるような、柔軟な設計になっている必要があり、ビヘイビアの側もまた、作成や変更が容易である必要がある。
以上のことから、本論文では、ビヘイビアをコンテンツとして、ロボットをメディアとしてとらえ、コンテンツ制作の観点からコミュニケーションロボットの設計手法を論じる。
0..4 コラボレーションによるコンテンツ制作
コンテンツの制作手法の一つとして、複数人で役割を分担し、一つのコンテンツを協調的に作り上げるというものがある。このような共同作業の形態を一般にコラボレーションと呼ぶ。たとえば映画の制作では、一本の映画に数百人もの人間が携わることも珍しくない。映画は本来複数人で制作するものであるが、本来一人で制作するコンテンツをコラボレーションによる制作に置き換えることで、様々な効果を期待することがある。たとえば、古くは、連歌や連句などである。これらは、複数の人間が参加することによって加味される、作品としての独特の面白さに特徴がある。また、参加者同士の教養や能力を競うという、一種のコミュニケーションツールとしての側面も持っている。
このようなコラボレーションを、情報技術によって支援する仕組みも多数存在する。このような仕組みの多くはインターネットを利用し、参加者同士で同期型あるいは非同期型のコミュニケーションによってコンセンサスを得ながら、協調的にコンテンツを制作する。インターネットを介することで、時間的あるいは物理的な距離が離れているユーザ同士でコラボレーションを行えることがこれらの技術の特徴である。
また、近年、Wikipediaに代表されるように、マス・コラボレーションという考え方が一般的に受け入れられてきている。マス・コラボレーションは、不特定多数のユーザがそれぞれ独立に創造的作業を行い、それぞれの成果物を統合し一つのコンテンツを構築する。不特定多数のユーザが参加することにより、必然的に、コンテンツの量および多様性が高くなり、また、参加者一人一人のコンテンツ作成能力が高くなくても、統合の過程で、第三者によって不備のある点が発見・修正され、全体の質が保たれることが期待される。
目的とアプローチ
本研究の目的は、RAAに効果的なコミュニケーションロボットを開発することである。これまでの節に述べたことを踏まえ、以下に、既存のコミュニケーションロボットをRAAで運用する際の現在の問題点を挙げる。
-
ロボットに組み込まれたビヘイビアは基本的に変化せず、 ユーザの興味を失わせる原因になる
コミュニケーションロボットの目的はユーザとのコミュニケーションを行うことであるが、ロボットに組み込まれたビヘイビアは出荷時の初期状態から基本的には変化しないため、そのことがコミュニケーションを阻害する可能性がある。当然ながら、こうしたロボットの多くは、生き物の成長に倣って、起動時間やユーザとのインタラクションなどに応じて段階的にふるまいを変化させるが、それらはあくまで、あらかじめに組み込まれたビヘイビアを段階的に切り替えているに過ぎず、そのバリエーションには限界がある。
-
コミュニケーションロボット開発において理想的な、 運用とロボットの改良を繰り返していくサイクルが考慮されていない
節で述べたように、コミュニケーションロボットの開発と改良は、運用とともに行われるべきものである。このサイクルを実際に行うためには、RAAの介護者などのロボットに関する専門的な知識を持たないユーザでもロボットのビヘイビアを簡単に改良することができる仕組みが必要である。
以上の問題点を踏まえ、われわれは、RAAを目的としたテディベア型コミュニケーションロボットの試作を行った。われわれの開発したロボットは、12個のサーボモータ、全身のタッチセンサ、カメラ、マイク、スピーカなどによって構成されており、それらを内蔵の小型PCで制御している。ロボットはサーボモータにより首や腕、口などの部位を動かしたり、カメラを使って顔領域を認識したり、あらかじめ指定した任意の色のオブジェクトを認識したりすることができる。また、マイクからの入力に対しては、必要に応じて音声認識を行う。さらに、音声合成による発話機能を備えており、音声認識と組み合わせることでユーザとの対話を実現できる。
われわれはこのロボットに、ネットワークを通じてビヘイビアを書き換えることができる仕組みと、そのような動的なビヘイビアの書き換えを考慮した制御アーキテクチャを試作し、導入した。このアーキテクチャでは、意味的なまとまりのある短い動作シーケンスの一つ一つをビヘイビアと呼び、それぞれが独立しており、入れ替え可能である。このビヘイビアは後述のビヘイビアエディタを用いることで、ユーザが容易に変更することが可能である。
これらのビヘイビアをユーザが設計し、その記述を作成・共有するためには、何らかの方法でビヘイビアの記述を制御プログラムから分離し、記述の独立性を高める必要がある。そこで本研究では、ビヘイビアを記述するためのXML表現によるスクリプトを定義した。ビヘイビアはスクリプトによって表現され、ロボットの動作はこのスクリプトをビヘイビア制御モジュールが解釈することで実行される。ビヘイビアは内部的にはこのスクリプトによって表現されるが、ユーザがビヘイビアを容易に設計できるように、本論文ではビヘイビアコンテンツの作成ツールとしてビヘイビアエディタを実装した。
本システムでは、ユーザが設計したビヘイビアはサーバ上で共有され、ロボットは無線ネットワークを用いてサーバに問い合わせを行い、共有されたビヘイビアを取得する。これによって、複数のユーザが互いに協力し合い、コラボレーションによってビヘイビアを設計していく環境を提供している。取得するビヘイビアは用途によって分類することができ、すべてのユーザが同一のビヘイビア集合を用いたり、また、あるユーザが部分的に書き換えて個別化したビヘイビア集合を用いたりすることも可能である。また、ビヘイビアエディタにおいて他者の作成したアクションなどを部分的に再利用することができ、これによりビヘイビアを容易に設計、改良していくことができる。
以上をまとめると、本論文では、RAAに効果的なコミュニケーションロボットの開発という目的のために、次の2つのアプローチで研究を行った。一つは、ビヘイビアを柔軟に変更可能なアーキテクチャを提案し、同時にビヘイビアを容易に設計・作成できるツールを提供することで、運用とロボットの改良を同時に行っていく開発サイクルを支援するという点である。そしてもう一つは、ビヘイビア設計においてユーザ同士がコラボレーションを行うことで、個人で設計する場合よりも効率的に、より効果的なビヘイビアを模索していくことができるという点である。本論文ではこれらの目的、アプローチに基づいて研究を行い、その成果を評価実験で評価し、考察を行った。
論文の構成
本論文は本章を含め7章で構成されている。第2章ではわれわれが開発したRAA用のロボットの、ハードウェア構成および制御アーキテクチャの詳細について述べる。また、このロボットを用いて行ったRAAの予備実験についてもここで述べる。第3章ではロボットにおけるビヘイビアとそのコンテンツ化について論じ、ビヘイビアエディタを用いたビヘイビアコンテンツの作成について述べる。第4章ではビヘイビアコンテンツの共有について論じ、ビヘイビアサーバの実装について述べる。第5章では、第3章および第4章で作成したシステムのRAAにおける有効性について実験、考察する。第6章では本研究の関連研究について、また第7章で本論文のまとめと今後の課題を述べる。
RAAセラピー向けロボットの開発
近年、ロボットを用いた医療である、ロボット介在活動(RAA: Robot Assisted Activity)が注目され、その成果が報告されている。その中でわれわれは、RAAに特化したテディベア型ロボットを試作し、実際にロボットを用いて高齢者を被験者としたRAAを行ったところ、被験者の健康状態に改善がみられた。本章では、AAAおよびRAAの歴史を踏まえた上で、RAA向けロボットの実装およびその臨床実験について詳細を述べる。
ロボット介在活動(RAA)
RAAはロボットを用いた医療行為であるが、その背景には動物介在活動(AAA: Animal Assisted Activity)がある。AAAは訓練された動物を患者に接触させることで、精神的、社会的または生理的な治療効果を得るものである。AAAの中でも、動物との接触時間を定めたり、治療効果を定量的に測定したりするなどして、厳密な治療計画のもとに行うものを特に動物介在療法(AAT: Animal Assisted Therapy)と呼ぶことが多い。AAAでは、動物が医療行為を行うのではなく、患者と医師の間に動物を介在させることによってなされるものであり、動物は補助的な存在である。横山によれば、動物との関わりが人間の健康の質を向上させる場合、すべてをAAAと呼ぶことができる。たとえば、以下の行為はすべてAAAに該当する。
-
動こうとしなくなりがちな認知症の老人に、犬と触れ合ってもらうことによって、精神的・身体的リハビリの補助とする。
-
目の不自由な人が、それを手助けする犬(盲導犬)と暮らすことによって生活の質が向上する。
-
子供達と動物に触れ合ってもらい、情緒的教育の一環とする。
-
一人っ子の家で動物を飼って、責任や共感を学ぶ。
-
病院に熱帯魚の水槽があって穏やかな気持ちになる。
-
バード・ウォッチングをしてすがすがしい気持ちになる。
このように、動物の治療的介入の度合いが大きいものからそうでないものまで、AAAに分類することができる。
AAAでは生きた動物を用いるため、特有の問題が生じる。AAAでは医療機関がAAAの支援団体に依頼し、支援団体が医療機関へ専用に訓練された動物を貸し出す。多くの場合、動物はその医療機関の中に持ち込まれ、疾患を持つ入院患者に対してAAAが行われる。このとき、医療機関はその性質上、衛生管理を徹底する必要があるため、治療現場へ動物を持ち込むことが困難な場合がある。また、動物が人間に危害を与えないように注意深くしつけ、患者の安全を守らなくてはならない。さらに、動物は生き物であるために性格に個性があったり、日によって体調が変化する。動物の訓練や体調管理などを考慮すると、AAAのコストは高く、手軽に実施できるものであるとはいえない。
RAAは、動物の代わりにロボットを用いて行うAAAである。近年、認知症高齢者、自閉症患者、小児病棟の入院患者などを対象とした、小型ロボットとのふれあいによるRAAの試みが、国内外の病院、老人施設などにおいて盛んに行われつつあり、医師、セラピストらとの共同検討によって、その心理的、生理的効果も多く報告されつつある。たとえば柴田らは、意欲の低下した高齢者の動機付け、気分向上、うつ状態改善などの「心理的効果」、尿検査によるストレス低減の確認などの「生理的効果」、RAA後の高齢者どうし、あるいは介護者との会話の活性化などの「社会的効果」などが見られたと報告している。また和田らは、RAA前後の脳波測定により、認知症高齢者の脳機能活性度の改善を報告している。
RAAでは、代表的にはアザラシ型ロボットであるPAROや、犬型のAIBOが好んで用いられる。RAAは、AAAで挙げられた衛生面や安全性、計画性などの問題を解決している。その一方で、ロボットが生き物ではないことにより、AAAにおける動物ほどの役割を果たすのが難しいことがある。現在の技術では動物と同等の知能とふるまいをロボットに持たせることは困難であり、ユーザに違和感を与えやすい。いかにユーザに親和感を持たせるような設計を行うかは、RAA向けロボットにおいて重要な課題である。
RAA向けロボットの開発
本研究において、われわれはRAA向けのロボットの開発を行った。本節ではこのロボットの要求定義とその実装について述べる。
0..5 機能要件
節を踏まえ、われわれはRAAのためのペット型ロボットを独自に開発した。開発にあたって、次のような機能用件を設定した。
-
親和的な外観であること
-
生き物のようなふるまいをすること
-
擬人化された表現を取り入れること
-
ユーザを飽きさせないための工夫をすること
以下に、この用件についての詳細と、ハードウェアおよびソフトウェア設計におけるアプローチをそれぞれ述べる。
【親和的な外観であること】外観設計はロボットとユーザーとの関係性を決定づける重要なものである。ユーザーが感情移入しやすい、かわいらしい外観とすることが、RAAの効果を高める上で重要と考えられる。われわれは、親近性とスキンシップを重視して、ロボットの外観を毛皮を有するテディベア型ぬいぐるみとした。その外観を図に示す。テディベア型ぬいぐるみは動物(クマ)を模したものでありながら、体型はむしろ小児に近い。すなわち動物と人間の中間的な存在感を持つと考えられ、擬人化特徴を持たせるためにも適した外観と考えられる。
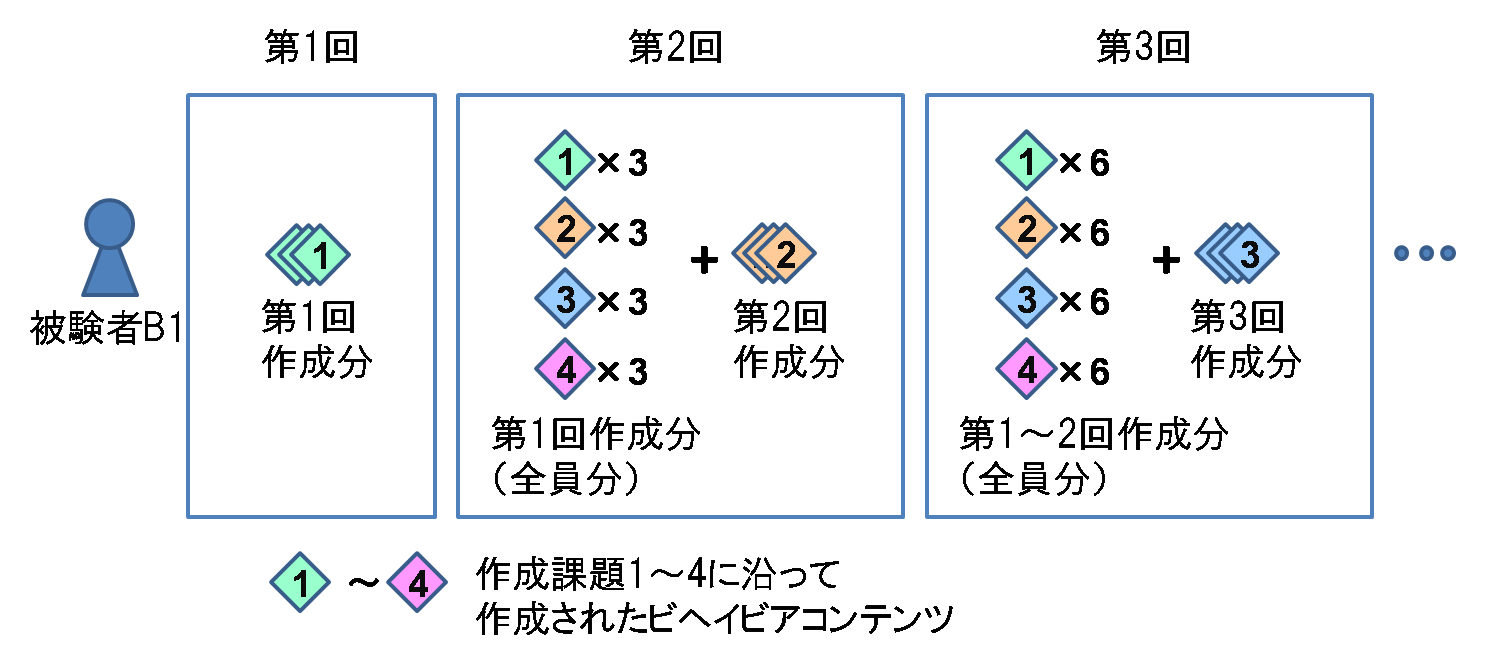
図1: ロボットの外観
【生き物のようなふるまいをすること】AAAで用いられる動物は、患者に対して直接的な治療を施す能力を持っているわけではなく、生き物として人間のそばに存在する生々しさが、間接的に治癒効果をもたらすのである。そこで本ロボットの設計においては、生き物を模した外見をもたせ、生き物らしい自然なふるまいを行うことを目指した。ふるまい制御は多数のビヘイビア(センサ入力に対するリアクション)の組により構成されるBehavior-based systemとして実装した。センサ入力と内部状態(感情)に応じて、登録されたビヘイビアを動作させることで、自律的な動作をする。この実装の詳細は本章の節で述べる。
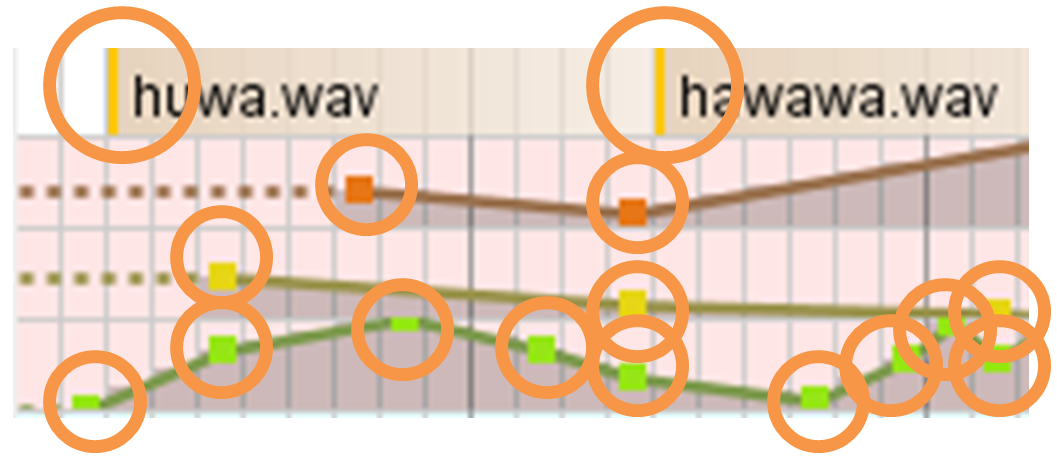
図2: 生き物的なふるまいの例(喜んでいる)

図3: 生き物的なふるまいの例(落ち込んでいる)
【擬人化された表現を取り入れること】高齢者向けを想定し、擬人化の方針として、孫のような幼小児的存在感を持たせた。高齢者により保護される対象として認知されることを狙い、5歳児程度の男児の声を発声する音声合成系を搭載した。音声インタラクションのほかに、対話実感の充実および認知症高齢者の興味を誘発する刺激表出のために、顔表情、手振り・身振り、接触などの非言語表現の多様性が有用と考えられる。特にアイコンタクトや顔表情による感情表出は、人間どうしのコミュニケーションにおいても関係性を決定づけるため、重要な要素と考えられる。また、幼児とのふれあいを演出するため、幼児の泣き声、笑い声、あくび、いびきなどの録音音声を、ロボットの感情状態に応じて再生し、それと同期して、表情、手振り・身振りなどのモーションを生成する。
【ビヘイビアを容易に追加・改良していける仕組みを取り入れること】ロボットを用いてRAAを行っていく中で、ロボットのふるまいや対話などについて、実用上不都合のある部分が見出されたり、新たに追加することでRAAに良い効果を与えるであろうものを思いついたりすることがある。本ロボットでは、あらかじめ組み込まれたビヘイビアだけでなく、ユーザが容易にビヘイビアを設計し、ロボットを改良していくことができる仕組みを実装した。ビヘイビアの制御方法については本章の節で、RAAの運用を通してビヘイビアを改良していくための仕組みについては第章、第章で詳しく述べる。
0..6 ハードウェア構成
機能要件をふまえ、われわれはロボットのハードウェアを設計し、実装を行った。ハードウェアの構成を図に示す。本ロボットは、複数のサーボモータやセンサ類を、内蔵の小型PCで制御している。以下に、ハードウェア構成の詳細をそれぞれ述べる。
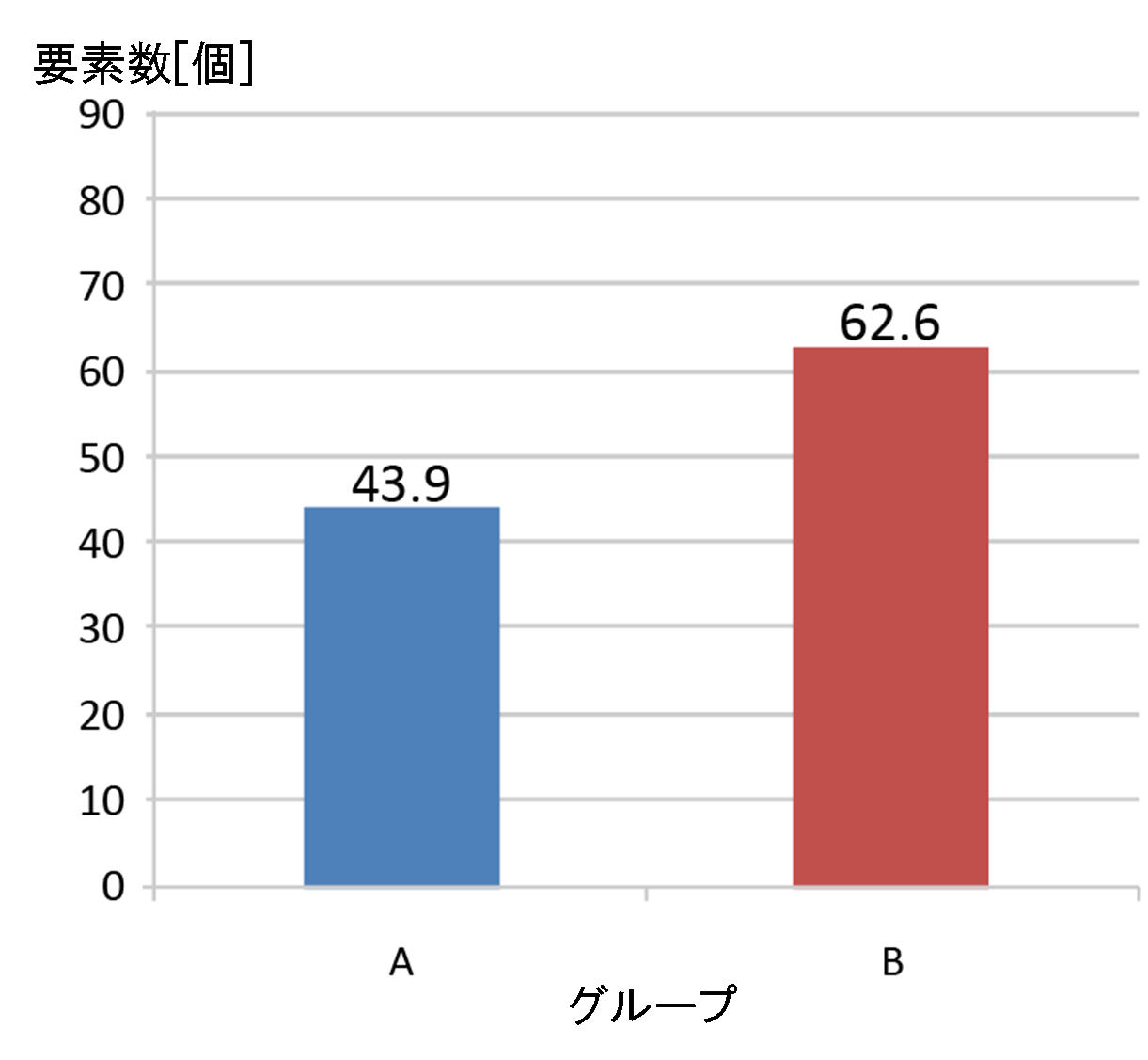
図4: ロボットのハードウェア構成
【サーボモータ】計12個のサーボモータを可動箇所に内蔵した。内蔵箇所は下記の通りである。
-
まぶた(左右連動で1軸)
-
耳(左右連動で1軸)
-
口(1軸)
-
首(3軸)
-
肩(両腕各2軸)
-
足(両足各1軸)
【マイク】音声入力のためのマイクモジュールを頭部に内蔵した。図にその外観を示す。このモジュールは8個のマイクを円形に配置しており、音源の定位を8方向の分解能で測ることができる。
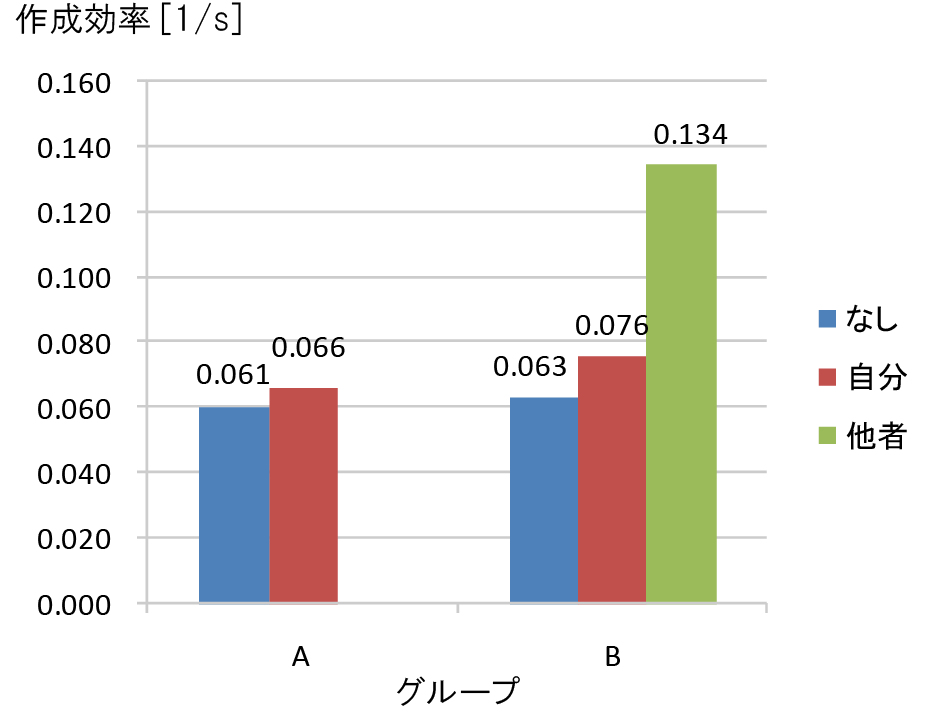
図5: マイクモジュール
【スピーカ】合成音声を発話するためのスピーカを内蔵した。このスピーカは後述の制御用PCの内蔵スピーカを利用している。
【カメラ】ユーザの顔認識などのために、小型カメラを鼻先に配置した。リアルタイムな画像処理を行うために、解像度はピクセルと比較的低めに設定して使用している。
【触覚センサ】圧電ブザーを利用した触覚センサを全身の毛皮の中に内蔵した。このセンサは、毛皮を撫でたときに発生する振動を電圧に変換する。
【3軸加速度センサ】ロボットの振動や重力方向に対する傾きを得るための3軸加速度センサを内蔵した。
【手のひらスイッチ】両手の先に、握手を検出するためのメカニカルスイッチを内蔵した。
【制御用マイコン】以上のデバイスは制御用のマイコンに接続されており、制御用PCの各デバイスへのアクセスを抽象化する。
【制御用PC】小型PCをロボットに内蔵し、制御用マイコンとUSBで接続している。マイコンでは各デバイスの低レベルの統合を行っているが、このPCでは、マイコンで抽象化されたデバイスに対して、ビヘイビア制御やインタラクション制御などの、高レベルの制御を行っている。また、このPCの無線ネットワーク機能により、ロボットのビヘイビアをネットワーク経由で動的に書き換えることが可能である。具体的には第章で述べる。
0..7 ソフトウェア構成
節で定義した機能要件に基づき、ソフトウェアの設計を行い、実装した。これらのソフトウェアは、節で定義したハードウェアにおける、制御PC上で動作する。制御PCの役割は、ビヘイビア制御である。ビヘイビア制御では各種センサデバイスで取得したセンサ情報を統合し、サーボモータやスピーカ等の出力デバイスに対して制御を行う。以下に、本ロボットのソフトウェアについて具体的に述べる。
【顔・オブジェクト認識】鼻先に内蔵したカメラを用いて、リアルタイムに画像処理を行い、人間の顔や、あらかじめ登録されたオブジェクトの認識を行う。顔認識では、ロボットから見た人間の顔が見える方向を識別する。オブジェクト認識では、赤いボールなどといった、認識する画像のパターンをあらかじめ登録しておき、顔認識と同じようにカメラの映像においてパターン認識を行い、方向の識別を行う。これらの認識によって顔やオブジェクトの方向を識別し、方向センサの一つとして利用する。
【音声認識・音源方向認識】頭部に搭載されたマイクモジュールにより、発話内容と、その音声が発せられた方向を水平8方向の分解能で認識する。発話内容を認識するためには、音声認識モジュールに対し、認識する語彙を指定する必要がある。
【音声合成】5歳程度の男児を模した、日本語の発話を行う。なお音声合成には、ANIMO社のFineSpeechを利用した。
【ビヘイビア制御】ビヘイビア制御は、入力デバイスと出力デバイスの中間に位置し、ロボットの知能を扱う部分である。ビヘイビア制御では、本ロボットに搭載されている各種センサの情報を統合し、あらかじめ登録されたふるまいのプログラム(ビヘイビア)を実行し、サーボモータや音声合成に対して適切な出力を行う。ビヘイビアは、無線ネットワーク通信により、全部あるいは一部を変更することができるように設計した。制御方法については本章の節で、ビヘイビアの変更手法については第章で具体的に述べる。
【無線ネットワーク通信】本ロボットには無線ネットワーク機能を持っており、アクセスポイント経由で外部のホストに接続することができる。本研究では、このネットワーク機能を用いてロボットのビヘイビアの変更を実装している。この実装の詳細については第章で具体的に述べる。
制御アーキテクチャ
制御アーキテクチャとは、本論文では、ロボットへの入力を受けて出力を制御するアルゴリズムのことを指す。制御アーキテクチャの設計については、ロボット工学の歴史の中で、いくつかの提案と実装がなされている。しかしそれらは一概に優劣の付けられるものではなく、当然、実装されるロボットの目的や特性によって向き不向きがあるため、ロボットに実装するためにはそれらをロボットに特化して設計に取り入れる必要である。われわれは本ロボットの制御アーキテクチャを設計するにあたり、既存の制御アーキテクチャを、節で定義した機能要件に基づいて比較し、われわれが過去に行ったRAAの運用上の経験を踏まえた上で検討を行った。
0..8 既存の制御アーキテクチャ
これまで提案されているロボットの制御アーキテクチャは、機能分割型と要素行動分割型の2つに大別できる。機能分割型は、センサ入力とそれに対するリアクション、それに伴う内部状態の遷移などを、あらかじめフローチャートのように順序立てて計画する手法であり、古典的に用いられてきた。機能分割型は、対話ロボットにユーザとの対話計画をプログラミングする場合など、計画性のある行動を扱うのに向いている。しかし、入力に対する即応性が求められるロボットには適さないことが指摘されている。また、その計画は環境認識能力を信頼せざるを得ないので、センサの誤認識などのノイズに対するロバスト性が低い。あらかじめあらゆる状況を網羅して計画立てる必要があるため、複雑な計画になるほど、状態の数は爆発的に増大し、全体の把握や管理が困難になる。そのため、人間の判断でビヘイビアの変更を行えるようにする必要があるわれわれのシステムには適さない。
これに対し、要素行動分割型は、センサ入力に対するリアクションを要素行動ごとに分割し、それらを並列に(あるいは並列に見立てて)実行する。要素行動分割型の制御アーキテクチャとしてはSubsumption Architectureが代表的である。要素行動には優先順位(レイヤ)があり、上位の要素行動が優先される。この方式は移動ロボットにしばしば用いられる。たとえば障害物を回避しながら走行する移動ロボットのようなロボットについて考えると、「前進中のロボットが前方に障害物を感知した」という状況に対しての要素行動は、「緊急停止する」「(衝突しそうにないことが判断できたなら)減速する、もしくはそのまま前進する」「(回り込める障害物だと地図上で判断できたなら)回り込んで前進する」などが考えられるが、これらはそれぞれ情報処理の複雑さが異なり、複雑な処理ほど計算時間が長くなると考えられる。そこで要素行動分割型では、障害物を感知したときに、これらの要素行動をすべて同時に試す。そして、計算の間に合った要素行動の中で、最上位レイヤのものが実際に実行される。これにより、たとえ突如前方に現れた障害物に対して地図のマッチングが時間的に間に合わなくても、最悪の場合でも「緊急停止」が行われることになる。この手法はロバスト性および即応性に優れているが、この手法だけでは、機能分割型のような計画性を持たせることは難しい。
機能分割型と要素行動分割型はそれぞれ一長一短があるが、双方を組み合わせることで互いの不利を補った統合型のアーキテクチャがいくつか提案されている。神田らは、このような統合型のアーキテクチャの一つとして、状況依存モジュールと呼ばれる単位でロボットの制御を記述するアーキテクチャを提案している。このアーキテクチャについて注目すべきは、ロボットの開発過程を強く意識しているという点である。神田らは既存のアーキテクチャについて、要素行動分割型、機能分割型などといった制御方式についてよりも、むしろ「そのアーキテクチャを基にどのようにロボットを開発していけばよいか」という、ロボットの開発手法に関する議論がより重要であると主張し、システム開発方法と一体化されたアーキテクチャとして、状況依存モジュールを提案した。神田らの主張は、「ロボットの開発は、実験と改良を互いに繰り返しながら行うべきであり、ロボットのアーキテクチャはそのような開発手法を受け入れる設計になっている必要がある」という、本研究におけるロボット開発の基本方針に合致する。
0..9 実装した制御アーキテクチャ
われわれは制御アーキテクチャとして、既存のアーキテクチャを基本として、一部を本研究の機能要件にあわせて変更したものを採用した。われわれのアーキテクチャは統合型の一種であり、開発手法と一体化しているという点において神田らの手法に類似している。
われわれは2006年度から現在に至るまで、本研究で用いているテディベア型ロボットの筐体を用いて、制御アーキテクチャおよび、アーキテクチャに搭載するふるまいを試作してきた。その経験をふまえて、本ロボットのアーキテクチャに求められる条件として、次の6つを定義する。
【センサ入力に対するリアクション(反射的行動)を実行できること】反射的行動は、タッチセンサや、音声認識、カメラなどの入力に対する行動を指す。また、同じ入力をトリガとする反射的行動や計画的行動がある場合、何らかの順位付けを行い、適切な行動が実行されることが必要であるため、機能分割型のようなアプローチが求められる。
【センサ入力を伴わない行動(自発的行動)を実行できること】自発的行動は、たとえば、まばたきや呼吸(肩を小さく上下させる)など、生理現象を表現するのに用いる。また、ロボットを長時間放置した場合にロボットが行う、いわゆる一人遊びのような行動もこれに分類する。これは、ユーザからロボットに対する入力が何もなくても、何らかの行動をすることで、ロボットの生き物らしさを演出するための行動である。自発的行動よりも、計画的行動、反射的行動の方が優先度は高い。
【対話などの計画的なインタラクション(計画的行動)を実行できること】機能分割型のような、計画的な行動を組み込めること。計画的な行動とは、ロボットのユーザとのインタラクションの計画を意味する。たとえばあるビヘイビアの後でしか実行されないビヘイビア
があるとき、
と
は計画的なビヘイビアであるといえる。なお多くの場合、反射的行動よりも計画的行動の方に高い優先度を割り当てる方が有効である。なぜならば、経験的に、計画的行動は、RAAにとって意味のあるインタラクションであることが多いためである。実際、節で示した実験では、被験者の高齢者に対して、「おばあちゃん、握手しよう」とロボットが話しかけ、握手が行われると、「ありがとう」と話す計画的行動をロボットに組み込んでおり、この行動がRAAにとって有効な影響を与えていることが観察されている。
【物理的に干渉しない複数の行動を同時に実行できること】同時に実行条件が成立した複数の行動が、物理的な干渉がない限り、同時に実行できること。物理的な干渉とは、ロボットの出力装置である、サーボモータや、スピーカを、同時に複数の行動が利用する状況である。たとえば、「右手を挙げる」という行動と、「右手を下げる」という行動を同時に実行することは、物理的に不可能である。われわれのアーキテクチャでは、このような干渉がない限り、複数の行動を同時に実行できるべきであるとする。また、計画的行動、反射的行動、自発的行動といった種類に関わらず、同時に実行できることが望ましい。なお、同時に実行される複数の行動において、出力装置が独立であっても、行動同士が意味的に矛盾する可能性がある。本論文ではそのような干渉を、物理的な干渉とは区別して、意味的な干渉と呼ぶことにする。しかし、行動同士の意味的な干渉が起こっているかどうかを制御アーキテクチャが判断するのは困難であるため、意味的な干渉については、制御アーキテクチャでは関与せず、行動の設計段階で、設計者が調整するものとする。
【ビヘイビアが部分的に変更可能であること】ロボット工学において「ビヘイビア」という名称は一般的に、センサ入力に対するリアクションという意味で用いられる。本論文では特に、制御アーキテクチャで動作させる、ロボットの行動を記述したデータのことを指す。第章で述べたように、本研究におけるわれわれの目的は、RAAの運用を通してロボットを改良していくことである。そのためには、ビヘイビアをアーキテクチャと分離し、その全部または一部を変更可能な状態にする必要がある。ビヘイビアの変更の際には、特殊なハードウェアや、専門的で複雑な行程を要することなく行えることが望ましい。また、そのようなプログラムを、専門的な知識を持たないユーザでも、容易に作成できるようにすることも、この条件に含まれる。
【ビヘイビアが人間に理解し易い単位で適切に分割されていること】ビヘイビアを人間が作成し、部分的に変更できるようにするためには、ビヘイビアが、適切な単位で分割されている必要がある。たとえば機能分割型アーキテクチャでは、ビヘイビアをフローチャートのように手続き的に記述するが、その一部を修正したり、そこに新しい要素を追加したりするためには、全体を把握する必要があり、ビヘイビアの要素が大規模になった場合それが困難になるといえる。そこで、意味的にまとまりのある単位で分割して管理することで、追加および修正がより容易になるようにする。
以上の条件を踏まえ、制御アーキテクチャを実装した。本アーキテクチャは機能分割型と要素行動分割型の両方を取り入れた統合型アーキテクチャである。本アーキテクチャにおいてビヘイビアとは、実行条件と実行内容の組を記述したものである。具体的には、ビヘイビアの構成要素として、次の三つを定義する。
-
コンディション
-
アクション
-
エフェクト
コンディションとはビヘイビア実行の条件あるいはトリガを指す。つまり、ロボットに対するセンサ入力や、一定時間の経過などがこれにあたる。アクションはロボットの動作を指し、サーボモータの角度の変化や音声の出力などがあてはまる。エフェクトは、ビヘイビアの実行結果として生じるロボットの内部状態変数の変化を指している。内部状態変数とは、ビヘイビアの設計者が自由に定義できる変数であり、整数型などの型を利用できる。コンディションなどに利用することができる。用途としては、たとえば、眠気の度合いや感情の起伏を数値化したものを変数に格納しておくことで、「眠いときに実行される」あるいは「機嫌がいいときに実行される」というようなビヘイビアの実行条件を指定することができる。また、エフェクトにおいても、「頭を撫でられると機嫌がよくなる」というような効果を実現することができる。なお、ビヘイビアのデータ構造については第章で詳しく述べる。
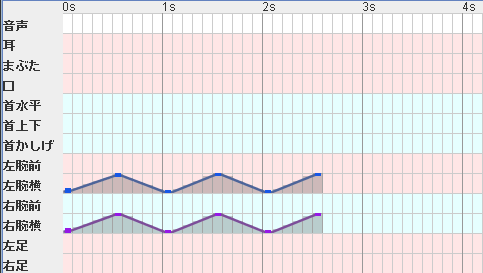
図6: ビヘイビア制御の流れ
本アーキテクチャは制御PCの上で動作する。PCには複数のビヘイビアが格納されており、条件を満たしたビヘイビアが次々に実行される。図は本アーキテクチャの動作の流れを示したものである。以下に、図における各部についてそれぞれ説明する。
-
<調査>~内部状態変数の値、センサ入力の値、タイマの値など、現在の内部状態を調べる。
-
<集約>~現在の内部状態がコンディション記述と合致するビヘイビアを集約する。無ければ「調査」に戻る。
-
<選択>~列挙されたビヘイビアのうち、優先順位の高いビヘイビアを選択する。
-
<実行>~選択されたビヘイビアのアクションを実行開始する。
-
<待機>~一定時間(100ミリ秒)待ち、「調査」に戻る。
本アーキテクチャにおいてあるビヘイビアからビヘイビア
へ遷移するような計画的行動を実装するための最も単純な方法は次の通りである。
のエフェクトにおいて、たとえばある変数
に1を代入しておく。そして
のコンディションでは「
の値が1だったとき」という条件を指定する。こうすることで
は必ず
の後にしか実行されなくなる。また、自発的行動を実装するためには、コンディションとして「タイマ」の値を指定する。タイマは、任意の時間周期で条件が成立する、特殊な内部状態変数である。この時間周期は常に一定のリズムに限られるわけではなく、ある程度の時間的なばらつきを持たせることが可能である。タイマを用いることで、「まばたき」などの自発的行動を表現でき、生き物らしさを表現するために役立つ。
本アーキテクチャの特徴は、構造が単純であるためビヘイビア同士の独立性が高いという点である。そのため、第3章および第4章で述べるような、一つ一つのビヘイビアをコンテンツの一種としてユーザが作成し、共有するという行為が容易であると考えられる。
RAAの予備実験
われわれは本ロボットを用いて、認知症高齢者を対象にRAAの予備実験を行った。本節では実験の概要と、実験結果の定量的評価について述べる。
0..10 実験手順
被験者は89歳の女性で、中等度の認知症患者であり、時間の見当識、短期記憶、空間構成に障害がある。また被験者は娘夫婦およびその孫と同居している。実験者の自宅来訪の影響を避けるため、実験期間中は実験者は被験者とはできるだけ接触しないようにし、実験と測定は被験者の同居家族(被験者の娘)が実施した。2週間の実験期間を設定し、1週目は比較対象のために被験者に通常の生活をさせ、被験者の日常的な状況を計測する期間とし、2週目は各日の午前中にロボットとのふれあい(RAA)を実施し、その効果を計測する期間とした。
効果測定の内容としては、A.M.I 社製Actigraph(図)による毎日の活動量計測と、東京医研(株)製ハートレータ(SA-3000P、図)を用いた心拍変異(HRV)測定による自律神経活性度・均衡度の計測を行った。これらの計測は、血液検査や尿検査などによる評価に比べ簡易であり、被験者への負担も少ない利点がある。
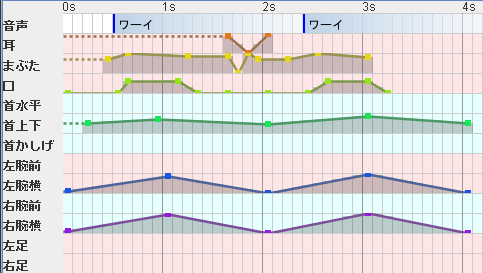
図7: 東京医研(株)製ハートレータ SA-3000P

図8: A.M.I 社製 Actigraph
2週目のRAAは、毎日、午前 11:00 から開始し15?30 分程度(被験者の状況を見て終了)おこなった。被験者にはダイニングテーブルに座っていただき、自律動作しているロボットを、被験者と正対する形で設置した。家族(被験者の娘)は、被験者の傍らに待機するが積極的な介在は行わず、可能な限り、ロボットと被験者の二者関係を維持し、ロボットの発話した言葉が聞き取れなかった場合などに助言する程度とした。
RAAで用いたロボットは、本研究で開発しているものを用いた。ロボットのビヘイビアとしては、幼児が被験者にあやされるような場面を想定し、ロボット側から被験者に、インタラクションを促すような言葉(「なでなでして!」、「だっこして!」、「握手、握手」、「こんにちは」など)を、適当な頻度で発声するようにした。また、感情を表す擬音として、泣いている声、笑い声、いびき、あくびなどの録音音声を、感情状態にあわせて、対応する動作とともに再生した。感情空間は「快?不快レベル」、「覚醒レベル」の2自由度の空間としており、今回の実験では、数分の周期で、これらのパラメータを強制的に遷移させた。鼻部のカメラ入力による画像処理により、被験者の顔を検出し、覚醒中には、適当な頻度で被験者とアイコンタクトするように制御した。生き物感を出すために、まばたき、耳のうごきなどはランダムにし、感情状態に応じて、その動作速度、動作周期などを変化させている。今回のロボットではインタラクション要素は手先のメカニカルスイッチのみであり、ロボットからの「握手、握手」のリクエストに対し、被験者が、手先を握った場合に、「ありがとう、おばあちゃん」と発声する。
0..11 実験結果
ロボットの表出する感情表現に対して、それに合わせる、あるいはまねる傾向がみられた。ロボットが笑う、泣く、眠くなるなどの表現をすると、その感情を受け入れ、一緒に笑ったり、顔をしかめたりされる。また、ロボットがあくびをし、いびきをかき始めると、ロボットを寝かしつけようとされる反応がみられた。被験者側がアイコンタクトを試みることがあるが、ロボットがそれに応えることができないと「眼をあわせてくれない」と訴えられる。「ありがとう、おばあちゃん」と相手の名前を呼ぶような言動をした場合、「おばあちゃんに、ありがとうって言ってくれたの」と、とても喜ばれた。体調のいい場合には集中力を持続される傾向がみられ、ふれあい時間も 30 分になる場合もあった。一方、体調のすぐれない場合などは、10 分程度で眠られてしまう場合もあり、その場合は、その時点で実験を終了した。実験期間が終了しロボットを引き上げるときには、「また会いたい」といった別れを惜しまれる態度も示され、ある程度の愛着が生じているようだった。
次に、RAAのセラピー効果について定量的評価を行った。効果の定量的評価のために、Actigraph による活動量評価と、心拍変異分析(HRV)による自律神経系評価を試みた。
0..11.1 自律神経活性度
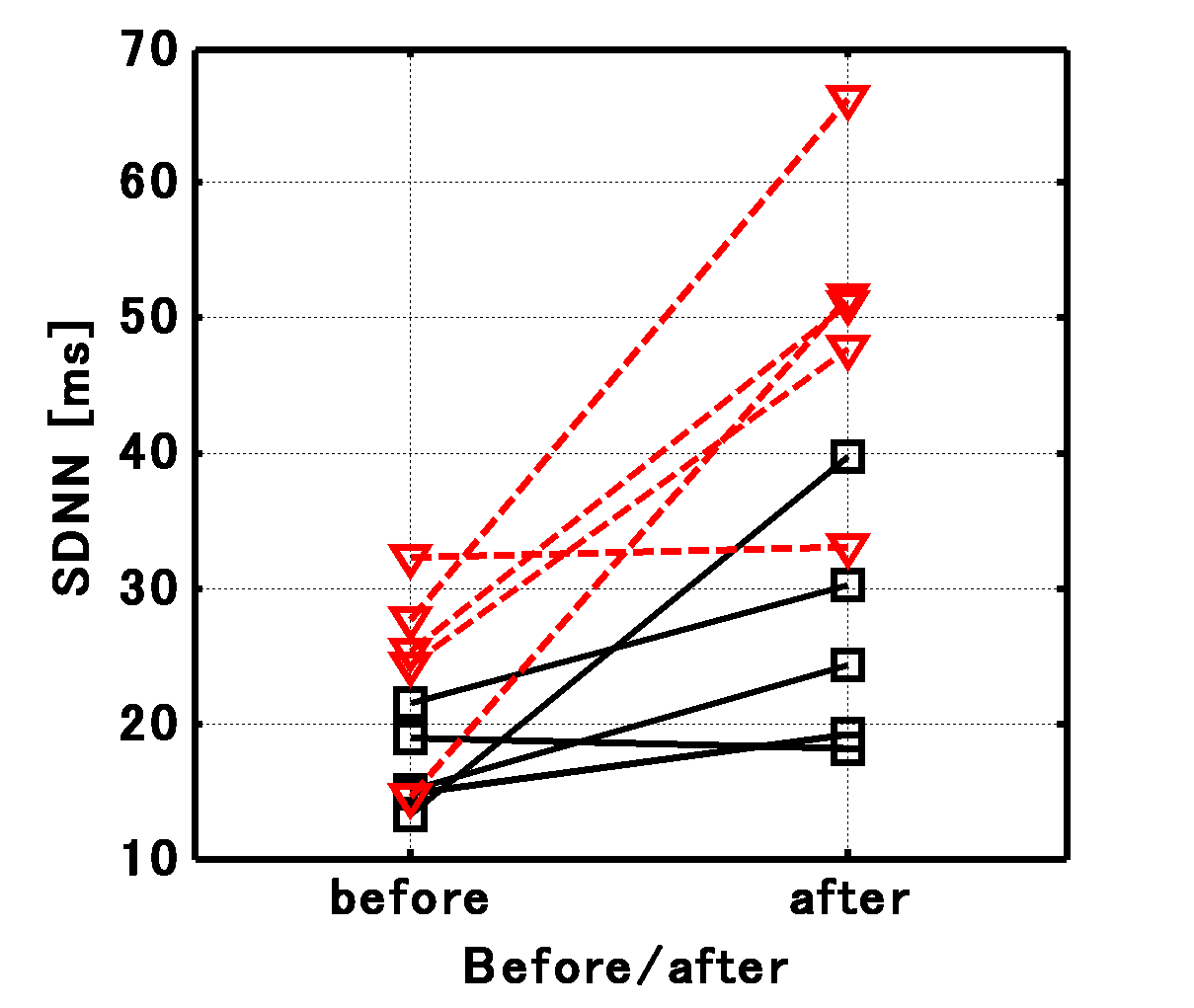
図9: RAAによる SDNN 値の変化((a)すべての日程)
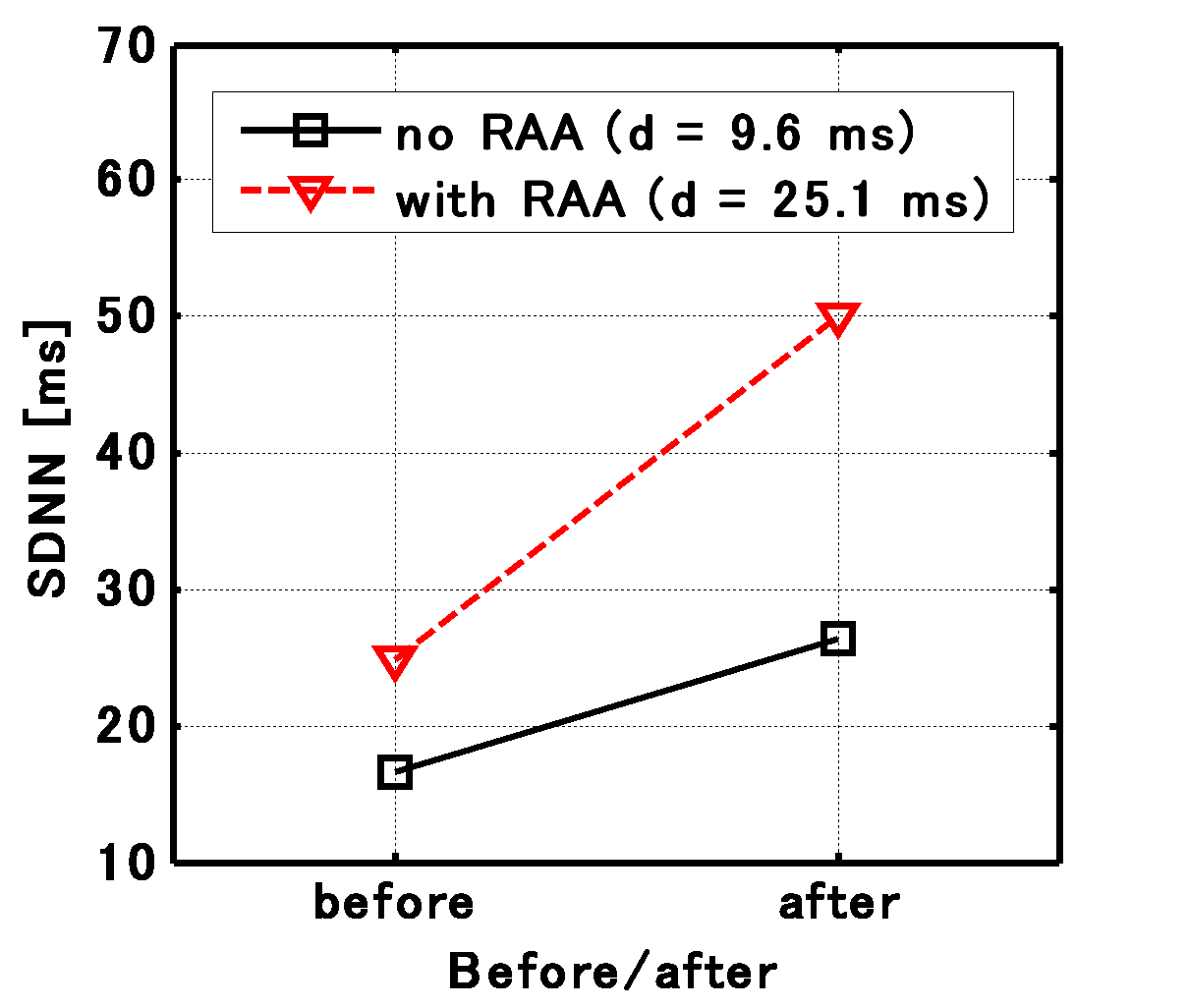
図10: RAAによる SDNN 値の変化((a)平均)
健康状態の評価基準の一つである、自律神経活性度を測定した。図は、RAA前後の SDNN値(心拍間隔の時間変動の標準偏差)の変化を示す。このSDNN値が大きいほど、自律神経の活性度が高く健康な状態である。図(a)は、RAA を行った場合(▽、2週目)と行わなかった場合(□、1週目)の各日の前後の SDNN値の変化を示す。図(b)は、それぞれの場合について平均をとったものである。図からわかるように、RAA を行った場合では、行わない場合に比べて、SDNN値を改善する効果が高い傾向がみられた。
0..11.2 交感神経・副交感神経の均衡度
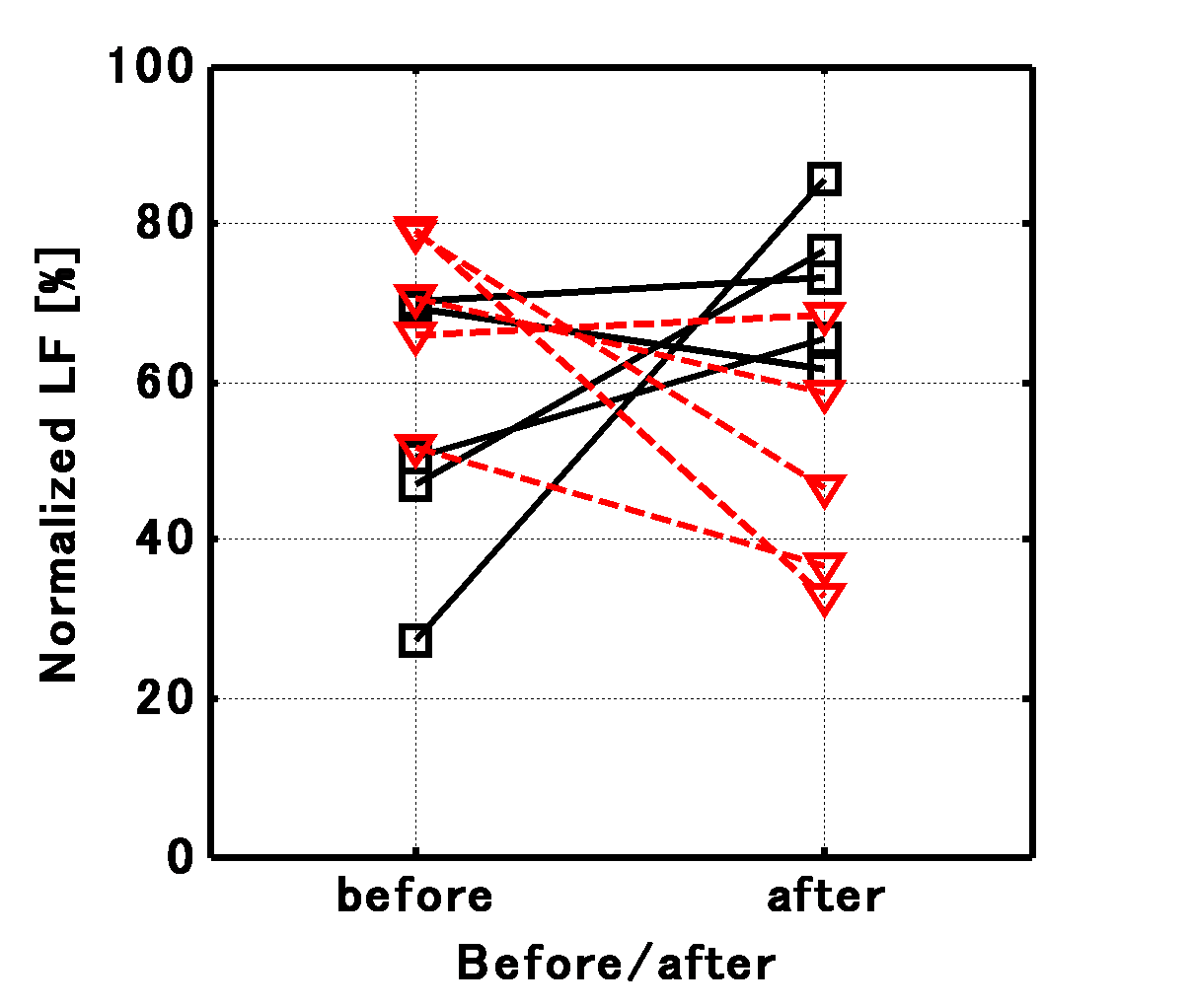
図11: RAAによる Normalized LF 値の変化((a)すべての日程)
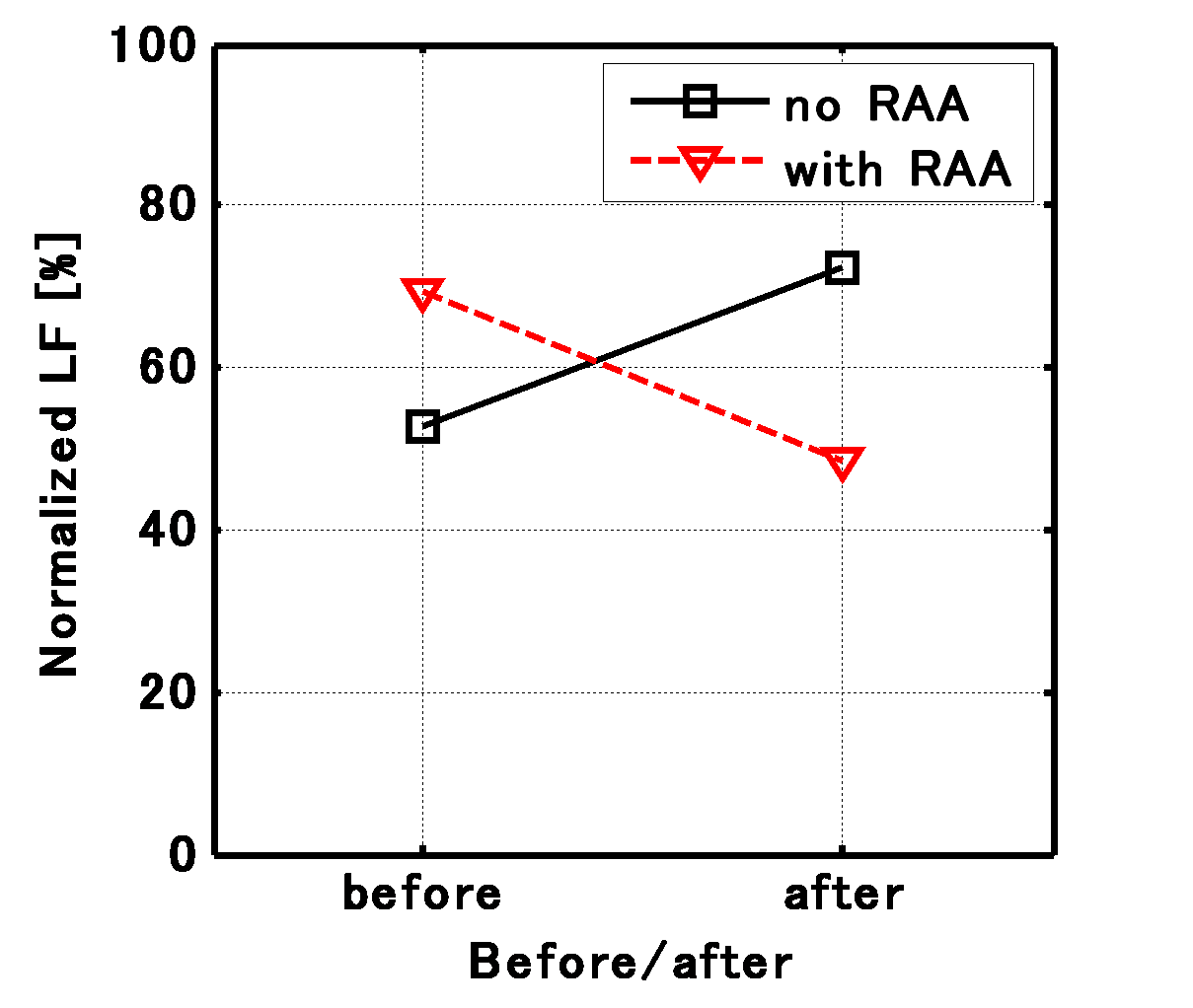
図12: RAAによる Normalized LF 値の変化((b)平均)
自律神経活性度の測定と同時に、健康状態を示す別の評価基準として、交感神経(SNS)・副交感神経(PNS)の均衡度の変化を測定した。これらの一方側が過多な不均衡状態が長く続くと、身体の異常をもたらす場合がある。図(a)は RAAを行った場合(▽、2週目)と行わなかった場合(□、1週目)の前後の SNS の比率(Normalized LF [%])を示す。図(b)は、それぞれの場合について平均をとったものである。Normalized LF 値は、60%程度の値を示すときが健康な状態である。図からわかるように、RAA を行った場合では Normalized LF 値を抑制する傾向がみられ、被験者がリラックスする方向の変化が推測される。
本章のまとめと考察
本章では、既存のRAA向けロボットについてや、RAAに求められているロボットの考察した上で、われわれが開発するRAA向けロボットの機能要件を定義し、機能要件を基にハードウェアおよびソフトウェアの設計を行った。またこのロボットを用いてRAAをおこない、そのセラピー効果を評価した。評価では、健康状態を客観的な基準によって数値的に測定し、RAAを行った場合と行わなかった場合とで健康状態の変化を比較したところ、RAAを行うことによる健康状態の改善が測定された。
顔認識の精度が低く、アイコンタクトがうまくいかないことが多くあった。また、音声合成の発音が悪く、やや衰えの見られる被験者の聴力では、せりふを聞き取れないことがあった。これらの点については、今後の開発を通して改良していく予定である。
また、この実験で利用したロボットには、節で設計した制御アーキテクチャを導入しており、われわれは実験のためにビヘイビアを試験的にいくつか設計し、ロボットに組み込んだ。ロボットの表出する感情表現に対して、それに応じる、あるいはまねる傾向が見られ、事前に用意したビヘイビアがRAAの効果を引き出していることが推定できる。しかし、用いたビヘイビアの中で、インタラクションの要素としては、握手しか用意できなかったため、被験者との親和度を高めるためには、インタラクションの要素を持つビヘイビアを増やすなどの、改善の余地がある。また、ビヘイビアの数が少なく、ビヘイビアとビヘイビアの間の、ロボットが動かない時間が多く見受けられた。今後はビヘイビアの全体の数を増やし、かつそのような間が生まれないような調整を行っていく必要がある。
ビヘイビアコンテンツ
第章では、われわれが研究開発しているRAA向けロボットについて述べた。本章では、RAAとビヘイビアの関係について考察した上で、ビヘイビアをコンテンツの一種として扱う手法とその意義を述べる。そしてビヘイビアコンテンツを容易に設計するためのオーサリングツールを提案する。またこのビヘイビアコンテンツの持つコンテンツとしての可能性についても考察を行った。
コミュニケーションロボットとビヘイビア
ノイマン型コンピュータがアーキテクチャからプログラムを分離したように、われわれは第章において、ロボット制御アーキテクチャからビヘイビアを分離した。すべてのコミュニケーションロボットは、たとえ精巧に設計されたハードウェアおよびその制御アーキテクチャを持っていたとしても、適切なビヘイビアなくしてはその性能を発揮することはできない。つまり、ビヘイビアの設計がその性能に大きく影響する。
では、適切なビヘイビアとはどのようなものなのだろうか。その問いに対する一般的な解はなく、ロボットの目的、外観、ハードウェア、使用される環境などの制約に大きく依存する。たとえばあるヒューマノイドロボットにとって適切なビヘイビアが、他のあるペット型ロボットにとっても適切であるとは限らない。またコミュニケーションロボットでは、似たようなハードウェア構成で作られていたとしても、たとえばペット動物の形をしているか、人間に近い形をしているかで、ユーザからは異なったふるまいを期待されることは自然である。
ロボットの存在およびふるまいが人間にとってどういう影響を与えるか、という問題は、ヒューマン・ロボット インタラクションの分野で議論されている。しかし、神田らによれば、適切なビヘイビアをどのように設計していけばいいのかという、ビヘイビア設計の方法論は、ロボティクスの分野において議論されていない。その原因としては、前述のように、扱うロボットが異なれば必要とされるビヘイビアも異なるため、ロボット研究者達がそれぞれ個別のロボットを開発している現在のロボット研究の現状では、統一的なプラットフォームを設計することが不可能であることが挙げられる。
用意したビヘイビアがコミュニケーションにとって適切であるかどうかを検証するには、実際に被験者実験をおこなう必要がある。また、コミュニケーションロボットの性質上、その設計には明確な正解がなく、完成形がない。以上の理由から、コミュニケーションロボットの開発手法としては、評価をおこないながら、改良を加えていく手法が望ましい。神田らは、コミュニケーションロボットの研究開発を、情報インフラの研究開発に例えて次のように述べている。
大学やベンチャー企業がさまざまな利用を試みながら、常に実社会での評価を繰り返した結果が、現在のコンピュータネットワークである。すなわち、情報インフラの開発においては、最初から応用目的が明確にあるわけではなく、さまざまな利用方法の検討、開発、実社会での評価を繰り返しながら、技術開発と、利用目的の発見を同時に進めてきたのである。
(中略)
コミュニケーションロボットの研究も、メディアの研究であり、情報インフラの研究であり、新しい工学研究である。それはまさに、パーソナルコンピュータの初期に似ている。多くの可能性を感じさせる一方で、明確な開発目的を絞り込むことは難しい。情報インフラの研究と同様に、発想・開発・評価を繰り返しながら、同時に、それを利用する社会を変革しながら普及させていく開発方法をとらなければならない。
神田らは汎用的なヒューマノイドロボットの研究開発を行っており、その開発の中で見出したのが、評価と開発を繰り返し行っていくという研究手法である。われわれのロボットにはRAAという開発目的があり、その点では神田らの研究背景とは異なっている。しかし、RAA向けのロボットの開発という目的が明確に定まっていても、やはり最適解の存在しない問題であるため、神田らの提案している開発サイクルは本研究にも適用できる。図は、その開発サイクルを表したものである。ロボット開発には終着点がなく、RAAでの運用・評価で得られたものを開発に反映し、少しずつ理想に近づけていくのである。また、この評価を通して、RAAの評価方法自体の確立や、インタラクションのモデル化といった、医学的・心理学的な課題についても同時に取り組んでいく必要がある(ただしこれについては本論文の範囲を超える)。本研究ではこのサイクルにおけるビヘイビアの改良に着目した。このような開発手法を取り入れるためには、(1)ロボットの側が、ビヘイビアの動的な変更を受け入れられるような、柔軟な設計になっている必要があり、(2)ビヘイビアの側もまた、容易に作成でき変更可能である必要がある。(1)については、既に述べた第章において、ビヘイビアを制御アーキテクチャから分離することで解決している。次の節では、(2)についてのアプローチを具体的に述べる。

図13: 理想的なコミュニケーションロボットの研究開発サイクル
ビヘイビアコンテンツ
近年のパーソナルコンピュータの高性能・大容量化や、一般家庭へのブロードバンドの普及に伴い、写真や映像、音楽など様々なコンテンツはディジタル化され、その多くはインターネットを通じて流通している。こういったマルチメディアコンテンツの制作は、かつては専門的な知識や高価な制作環境が必要であるなど、素人にとっては容易なものではなかった。しかし近年では、ディジタルカメラなどのハードウェアの普及や、パーソナルコンピュータやインターネットの発達により、無料もしくは比較的安価に、誰でもコンテンツの制作環境を手に入れることができるようになってきた。そのため、コンテンツ制作における敷居はかつてに比べて明らかに低くなってきており、インターネット上では個人の制作したマルチメディアコンテンツの流通が広く行われている。たとえば動画共有サイトYouTubeでは、2007年5月21日時点で8000万もの動画がアップロードされている。われわれは本論文の中で、ロボットにおけるビヘイビアは、制御アーキテクチャから分離された、変更可能な情報であるべきであることを述べてきた。そしてビヘイビアはRAAにおいては、RAAの運用サイクルの中でその実施者が自由に設計・編集できることが望ましい。ビヘイビアは、ロボットのユーザとのインタラクションを定義するプログラムであり、そのふるまいはユーザにとってロボットの個性や性格として認知される。ロボットの一挙手一投足は、ユーザとのインタラクションを左右する重要なものであるため、ビヘイビアの設計には、設計者のセンスやアイディア、きめ細かな作り込みが求められる。この事からビヘイビアは、映像や音楽のような、繊細な表現力を持っており、コンテンツとしての価値があるといえるだろう。そこでわれわれは本ロボットにおけるビヘイビアを一種のコンテンツとして見なし、ビヘイビアコンテンツと呼ぶことにする。そしてビヘイビアをコンテンツと見なすとき、ロボットはそれを再生するプレーヤであるといえる。
われわれが研究開発しているロボットは、現在ではまだハードウェア・ソフトウェアともに試作段階であるが、将来的には量産販売を目標にしており、ロボットにおいて利用されるビヘイビアコンテンツを誰でも自由に作成可能にし、作成されたコンテンツをインターネット上で流通させることによって、新しいメディアとしてのコミュニケーションロボットを提案する。
ビヘイビアをコンテンツとして扱っているロボットは既にいくつか存在している。たとえばSONYのAIBOやRollyは、付属のソフトウェアでビヘイビアを設計し、インターネット上で公開することができる。また、岡田らは、ヒューマノイドロボットのビヘイビアをコンテンツとして一般のエンドユーザに流通させ、多数のユーザによる評価を可能にするといったロボット研究の新しい展開を提案している。しかし、これらの先行研究で扱っているビヘイビアは、われわれのビヘイビアとは性質が異なる。先行研究におけるビヘイビアは単体でロボットのふるまい全体を変更するものであるが、われわれのビヘイビアは局所的ふるまいを規定するものである。われわれは思想として、ロボットのビヘイビア全体の中で一部分だけを変更することを想定しているため、たとえば、挨拶をするビヘイビア、撫でられたときに両手を挙げて喜ぶビヘイビア、といったように、ビヘイビアを意味的に独立した単位で分割し、それぞれを別のコンテンツとして扱う必要がある。また、まばたきのようなビヘイビアは、他のビヘイビアと同時に実行される可能性がある。つまり一台のロボットに対しては、複数のビヘイビアコンテンツを組み込むことでコミュニケーションロボットとして成立するのである。このことから、複数のビヘイビアコンテンツを組み合わせたときにロボットの性格や個性のようなものが生じるため、ビヘイビアコンテンツをどのように組み合わせるかという、組み合わせの問題に関してもユーザによる創作の余地があり、その点においては本研究におけるビヘイビアコンテンツは先行研究におけるそれとは性質が異なるものであるといえる。
ビヘイビアコンテンツの構造
ビヘイビアをコンテンツとして扱うためには、ビヘイビアをディジタルなデータとして記述するためのフォーマットを定義する必要がある。われわれはフォーマットを定義するにあたって、ビヘイビアコンテンツをコンディション、アクション、エフェクトの三つの要素に分割し、それぞれを独立したコンテンツとした。これは同一のコンディションに複数のアクションを割り当てたりといった、コンテンツの共有と再利用がより容易になるためである。このビヘイビアコンテンツの共有と再利用については、具体的には第章で述べる。
0..12 アクションの記述
次に、ビヘイビア記述フォーマットについて説明する。われわれはXML(eXtended Markup Language)によってビヘイビアを記述するフォーマットを定義した。まず、アクションの記述例をリストに示す。この例は、左手を上に挙げ、左右に振りながら、音声合成で「こんにちは」と発話するアクションを示している。アクションでは、サーボモータを動かすことと、合成音声を再生することができる。サーボモータの動作指定では、まずサーボモータの軸(例では servo="LEFT"、左腕の肩の軸)を選択し、その軸のサーボの角度( rate、0.0から1.0の値)およびその角度に至るまでの時間( duration、単位はミリ秒)を連続して指定している。再生する合成音声の指定は文字列で行い、ここでは「こんにちは」を指定している。ここで指定した文字列はロボットの音声合成機能によって音声に変換され、ビヘイビアの実行時にはサーボモータの動作と合わせて再生される。また、文字列の代わりにSSML(Speech Synthesis Markup Language: 音声合成記述言語)と呼ばれる、XML形式の表記を用いることもでき、音声合成ソフトウェアに対する、せりふの抑揚や間、発話速度などの細かい指示を指定することが可能である。また、あらかじめ用意されたwav形式のファイルを指定することで、音声合成の代わりに再生することができる。これによって、音声合成では困難な、笑い声や泣き声などをより自然にせりふに含めることができる。
0..13 コンディションの記述
リストは、ビヘイビアの構成要素の一つである、コンディションのXML記述である。この例では、「変数` $pleasure'が0.5以上」かつ、「マイクで`こんにちは'という発話を認識した」場合に実行されるビヘイビアであることを指している。なお条件式の文法は、Ruby言語の文法に則る。コンディションにおける条件式ではRubyにおける条件式と同様に、この条件式がnilもしくはfalseの値を示すときに偽、それ以外の場合は真として扱われる。条件式が真である場合に限って、コンディションに関連付けられたアクションおよびエフェクトが実行される。
ここでは、変数として $pleasureを用いたが、これはあらかじめロボットに用意されている感情を表現するための変数の一つである。 pleasureを含め、あらかじめ用意されている変数には次のようなものがあり、コンディションおよびエフェクトで利用できる。
【 $pleasure】快-不快の感情を表す変数。0.0から1.0の値を取り、値が大きいほどロボットが快適な精神状態を表し、小さい値の時は不快感を感じている精神状態を表す。
【 $arousal】覚醒-睡眠の状態を表す変数。0.0から1.0の値を取り、値が大きいと覚醒状態を表し、活発で積極的な精神状態となる。値が小さいと睡眠状態を表し、緩慢で消極的な精神状態となる。

図14: RusselのPleasure-Arousalモデル
なおこれらの変数は、感情(情動)のモデルの一つである、Pleasure-Arousalモデルに由来している。Pleasure-Arousalモデルは基本感情を「快-不快」「覚醒-眠り」という直交した2つの軸によって表現するモデルであり、基本感情が図のように円環状に表される。 dictation('こんにちは')は、マイクからの入力に対して音声認識機能が「こんにちは」という発話を認識した事を示す述語である。このほかに、たとえば以下のような述語が用意されており、条件式に利用することができる。
-
音声認識に成功した
-
手のひらのスイッチが押された
-
顔・オブジェクト認識に成功した
-
前回の実行から一定時間が経過した
これらの条件を andやorで組み合わせてコンディションとして指定することで、ビヘイビアの実行条件を記述する。
0..14 エフェクトの記述
エフェクトでは、ビヘイビアの実行による内部変数の変化を記述する。たとえば、撫でられたときに機嫌が良くなる、といったビヘイビアを記述する場合、「機嫌が良くなる」という状態を表現するのがエフェクトである。エフェクトの記述例をリストに示す。ここでもコンディションと同様に、Ruby言語によって式を記述することでエフェクトを表現している。ここでは、変数 pleasureはあらかじめ用意された特別な変数であり、0.0以上0.1以下の値を取ることが決められている。エフェクトの中の計算でこの値域を下回ったり、あるいは上回ったりした場合、自動的に0.0もしくは0.1の値に飽和されるようになっている。従って値域に収まらない値を取ることはできない。
ここではエフェクトとしてあらかじめ用意された変数 pleasureと同様に、`
記号を付けて表記する。変数はやはりRuby言語で表されるため、型に関する詳細な説明は省くが、Fixnum型やFloat型、String型などが利用できる。宣言せずに変数を利用できるのはRuby言語の特徴の一つであり、エフェクトにおいても、宣言していない変数を参照することができる。宣言されていない変数を参照した場合、初回は nilが格納されている。
0..15 ビヘイビアの記述
ビヘイビアを記述するには、コンディション、アクション、エフェクトのIDをそれぞれ指定する。この三つの組み合わせがビヘイビアを表している。このように三要素を分離しているのは、複数のビヘイビアで同じアクションを使用したり、同じ条件下で実行される複数のビヘイビアを記述しやすくするためである。複数のビヘイビアが同時に実行条件を満たす場合、 priorityの数字が最も大きいビヘイビアが実行される。
ビヘイビアコンテンツの作成
われわれはビヘイビアコンテンツを容易に作成するためのツールである、ビヘイビアエディタを提案する。ビヘイビアエディタはGUI(Graphical User Interface)として設計されており、視覚的な操作によってビヘイビアコンテンツを作成できる。内部的には第節で定義した形式でコンテンツを出力する。本エディタを用いて作成したビヘイビアは、エディタの起動しているローカルPCに保存されるのではなく、ビヘイビアコンテンツサーバという専用のサーバに保存される。これはビヘイビアコンテンツをユーザ間で共有するための仕組みであるが、サーバの仕様や共有の仕組みについて具体的には第章で述べる。ビヘイビアエディタではアクション、コンディション、エフェクトをそれぞれ作成し、それらを関連付けることにより、一つのビヘイビアコンテンツを作成する。本節ではビヘイビアエディタの仕様について説明する。

図15: アクションの編集
図は、ビヘイビアエディタの編集画面である。ビヘイビアの編集では、サーボモータの制御情報や、音声合成による発話内容などをタイムライン上で指定することで視覚的に編集することができる。以下、図の(a)-(g)各部について説明する。
【(a)ビヘイビアの一覧】図(a)は、サーバ上に保存されているビヘイビアの一覧をカテゴリ別に表示している。編集するビヘイビアを選択したり、新しくビヘイビアを作成する場合はこのウィンドウから行う。サーバ上におけるアクションの共有については第章において具体的に述べる。
【(b)メタデータウィンドウ】図(b)は、現在ビヘイビア一覧(a)で選択されているアクションのメタデータを表示するウィンドウである。アクションのメタデータには、以下の情報が含まれている。
-
ビヘイビアID
-
タイトル
-
制作者ID
-
編集開始時刻
-
サーバへの保存時刻
-
カテゴリ
-
コメント
-
親ビヘイビアのID
これらのメタデータはビヘイビアをサーバへの保存時に同時に記録される。ビヘイビアIDはビヘイビアの作成時にサーバから発行されるIDであり、サーバ上に保存されているすべてのビヘイビアにおいてユニークである。
【(c)ツールバー】図(c)は、ビヘイビアの作成に関するインタフェース上の制御を行うボタンの集合である。 Commitボタンは、編集したビヘイビアをサーバへ保存するときに使用する。 Initボタンは、プレビューウィンドウ(f)(g)におけるロボットの姿勢を初期状態に戻すときに使用する。 Playボタンは、タイムライン上で編集したアクションをプレビューウィンドウ(f)(g)において再生するためのボタンである。再生を行うと、プレビューウィンドウに描かれたロボットが、実際のロボットの動きを模してアニメーションする。またこのとき、エディタにあらかじめロボットの持つIPアドレスを設定しておくことで、プレビューの再生に同期してロボットのサーボモータが駆動し、動作確認をすることができる。 Editボタンは Selectボタンとトグルになっており、タイムラインにおけるマウス操作のモードを切り替えるものである。 Editボタンが有効になっている間は編集モードであり、タイムライン上に要素を書き込むことができる。 Selectボタンが有効になっている間は選択モードであり、タイムライン上で要素を選択し、選択した範囲を移動したり削除したりすることができる。 Sliderボタンはトグルボタンであり、有効になっていればタイムライン上にサーボの角度を細かく指定するためのスライダが表示される。 Speakボタンを押すと、タイムライン上のカーソルで選択されているフレームに、音声合成の文字列を挿入するためのウィンドウが表示される。
【(d)タイムラインウィンドウ】図(d)で示されるタイムラインウィンドウは、アクションを編集する上でメインとなる画面である。タイムラインはセルと呼ばれる格子状の枠からなり、一つのセルに一つのデータが格納される。格子の縦軸(行)はサーボの種類を指しており、横軸(列)は時間軸を表している。横軸の時間単位は、セル一つ分の長さ(1フレーム)が100ミリ秒である。縦軸のサーボは、ロボットのハードウェアに合わせて12カ所あり、それぞれのサーボに対して折れ線グラフのような連続した線を描くことで、ロボットの動きを表現する。グラフの描画は、マウスのダブルクリックやドラッグ操作で行う。タイムラインの縦軸の中で、一番上の「音声」の行のみ扱いが特殊で、この行はサーボではなく発話内容を表している。発話内容は、ツールバーにおける Speakボタンを押すことで挿入および編集を行う。図に、発話内容の編集画面を示す。発話内容は文字列によって指定(図(a))するか、音声ファイルによって指定(図(b))するかを選択する。文字列による指定の場合、音声合成機能による発話がアクションに挿入される。「リップシンクを挿入」のチェックボックスをチェックしておくと、タイムライン上の「口」のサーボ行に、音声合成機能と同期したリップシンクのデータが挿入される。

図16: 発話内容の編集((a)文字列による指定)

図17: 発話内容の編集((b)音声ファイルによる指定)
【(e)サーボウィンドウ】図(e)は、タイムライン上で編集しているサーボの角度の状態を一覧するためのウィンドウである。このサーボウィンドウにはスライダが並んでおり、スライダの値はタイムラインウィンドウ(d)やプレビューウィンドウ(f)(g)の表示と同期している。スライダを操作すると、同期している各ウィンドウにおいて該当するサーボの角度に反映される。エディタからイーサネット経由でロボットが認識されていれば、ロボット本体の各サーボにおける角度とも同期させることができる。これにより、サーボウィンドウにおける操作はロボットに反映され、また逆に、同期したロボットの腕などをユーザが動かすと、その軸の角度がサーボウィンドウに反映される。
【(f)(g)プレビューウィンドウ】図(f)(g)は、編集しているアクションをソフトウェア上で再現するためのウィンドウである。図(g)は顔のサーボ(耳、まぶた、口)を、図(f)はその他本体のサーボ(首、肩、足)を表現している。本エディタはイーサネット経由でロボット連携させることができるが、ロボットとの連携を行っていなくても、このプレビューウィンドウにおいて動作を確認することができる。ツールバー(c)における Playボタンを押すことで、図のように、プレビュー表示がアニメーションし、アクションの再生が行われる。プレビューウィンドウ上にレンダリングされているロボットの各部をマウスでドラッグすると対応する部位を視覚的に動かすことができ、そのときサーボウィンドウ(e)やタイムラインウィンドウ(d)、連携しているロボット本体と同期が行われる。

図18: アクションのプレビュー
コンディションの編集画面を図に示す。コンディションの編集はツリーウィンドウと条件ウィンドウによって構成され、ツリーウィンドウにはandやorによるツリー構造で表されたコンディションが表示され、ツリーの要素が各条件に対応している。条件指定ウィンドウではツリーウィンドウにおける条件式の編集および追加を行う。条件としては節で述べたものを利用できる。

図19: コンディションの編集(左:ツリーウィンドウ 右:条件ウィンドウ)
エフェクトの編集画面を図に示す。エフェクトの編集は、リストウィンドウと編集ウィンドウによって構成される。リストウィンドウには、編集中のエフェクトに含まれる式の一覧が表示されている。編集ウィンドウでは、リストウィンドウにおいて選択した式を編集することができる。

図20: エフェクトの編集(左:リストウィンドウ 右:編集ウィンドウ)
本章のまとめと考察
RAAに用いるコミュニケーションロボットにとって、適切なビヘイビアを設計することは重要な問題である。本章では、RAAとビヘイビアの関係について考察した上で、ビヘイビアをコンテンツの一種として扱う手法とその意義を述べた。そしてビヘイビアコンテンツを容易に設計するための、ビヘイビアエディタの開発を行った。このエディタを用いることで、RAAの実施者が容易にビヘイビアを編集できるようになる。
本章では、われわれはコミュニケーションロボットにおけるビヘイビアに、映像や音楽などの作品のような繊細な表現力を見出し、ビヘイビアをコンテンツとする手法について述べた。ビヘイビアコンテンツは既存のコンテンツとは異なり、ロボットというメディアを通すことで身体性を持つという特徴がある。つまりビヘイビアは、擬人化された生き物を模した、実体のあるロボットが演じるものであり、コンピュータのディスプレイ上で表示されるだけのアニメーションとは違い、実際に肌に感じられる生々しさを持っている。われわれはビヘイビアコンテンツはそのような身体性という独特の表現力を持ったコンテンツであり、既存のコンテンツにはない面白みがあると考えている。
ビヘイビアをコンテンツとして扱う利点は、既存のコンテンツ技術が適用できる点である。写真や動画などのコンテンツについてはインターネット上の共有サイト(たとえばFlickr,YouTubeなど)が存在し、一般ユーザが作成したものが共有されている。これらのサイトでは、Webブラウザ上でコンテンツを閲覧できるようにしたり、コンテンツの推薦を行ったりしている。本論文では第章において、ビヘイビアコンテンツを、写真や動画のように共有する仕組みについて述べている。この共有システムでは、コンテンツの推薦や個人適応などについてまでは触れていない。しかしビヘイビアをコンテンツとして一般的に流通させることで、将来的には大量のビヘイビアが生まれ、共有されることが期待できる。そしてその中からロボットのユーザにとって有用なビヘイビアを得るための技術として、既存のコンテンツ技術が利用できると考えられる。では逆に、ロボットのビヘイビアをコンテンツとして扱うことによる弊害について考える。たとえば本研究におけるロボットのように、擬人化され、人格を持っている(ように見せかけられた)ロボットが一般的に普及し、さらにそのビヘイビアがコンテンツとして広く流通している状況を考えてみる。すでにいくつかのビヘイビアコンテンツが組み込まれたあるロボットは、そのビヘイビアによって、ある程度の対話や、生き物らしいふるまいをしており、ユーザはロボットに対して親和的な感情を抱いているとする。そのような状況において、もしロボットのビヘイビアが突然、すべて新しい別のものに置き換えられたらどうなるだろうか。新しいビヘイビアは、それまでロボットに組み込まれていたビヘイビアとは趣の異なるもの(口調や性格が大きく異なるなど)であった場合、ユーザはロボットに対してどのような感情を抱くだろうか。ユーザはビヘイビアの変更が起こった前と後のロボットの人格は、同一なものであると感じるのだろうか。それとも、別の人格になってしまったと感じるのだろうか。ビヘイビアの変更行為は、ユーザから見たロボットの人格の同一性に関わる問題であり、ビヘイビアの質の問題とは独立に存在している重要な視点である。ビヘイビアを改善しつつロボットを運用し、さらにユーザに親和的な感情を継続して抱かせていくためには、質の良いビヘイビアを用意するだけでなく、「質のいい変更行為」を行う必要があると考えられる。ロボットに好みのビヘイビアを組み込み、カスタマイズしていくことによって感じる愛着と、ロボットと生活を共にしていく事によって感じる親しみとは、質が異なるものであるだろう。これらの2種類の感情を共存させることができるのかどうかという問題は非常に興味深いが、本研究の範疇を超える議論であり、心理学的な知見から考察を加える必要がある。
ビヘイビアの変更行為における、ユーザから見た人格の同一性の維持について、技術的な解決方法があるとするなら、それはビヘイビアに含まれる意味内容を機械が理解し、意味的に適切なビヘイビアの変更を自動で行える仕組みを用意することである。ビヘイビアの変更は、ロボットのユーザが明示的に行うのではなく、ユーザとのインタラクションが行われていない時間帯に、自動的かつ暗黙的に行う。たとえばユーザが寝ている時間帯に、ロボットが自動的にサーバから新しいビヘイビアコンテンツを取得するのである。このときに取得するビヘイビアコンテンツは、これまでのユーザとのインタラクションを経て経験的に推測されるユーザの嗜好によって、サーバ上のコンテンツの中から選択される。このような仕組みが実現されれば、不適切な変更によってユーザが違和感を感じることは減少すると考えられる。また、この仕組みによって自動的な変更行為が適切に運用されれば、ユーザに対してロボットが成長しているように見せかけることができる。しかし、この仕組みの実現のためには、ビヘイビアコンテンツの意味内容を機械が把握し、コンテンツ間の意味的な関係を正確に計算できる必要がある。このような理想にはまだ及ばないが、第章では、ビヘイビアコンテンツにおける意味内容の判別についてのアプローチの一つを述べている。
ビヘイビアコンテンツの共有と再利用
前章ではビヘイビアをコンテンツとしてとらえ、その作成手段について議論した。一方でコンテンツの作成において、コラボレーション(共同作業)が有効な場合がある。複数のユーザが互いに協力し合ってコンテンツを作成することで、一人のユーザが単独で作成する場合に比べて、作成効率やアイディアの創出において有利になることがあるだろう。本章ではそのようなコラボレーションによってコンテンツを製作する例を紹介し、ビヘイビアコンテンツの作成に適用する。われわれが開発したシステムでは、複数のユーザがビヘイビアコンテンツを専用のサーバ上で共有し合い、他者の作成したコンテンツを閲覧したり編集したりすることで、ビヘイビアコンテンツの作成をより容易にし、コンテンツの質においても向上することを期待している。なお第章では本章において実装を行った共有システムを用いて被験者実験を行い、その効果を評価している。また本章では、共有を行うにあたって重要となる、ビヘイビアコンテンツを効率的に検索する手法についても検討し、実装を行った。
コンテンツの作成とコラボレーション
コンテンツの作成手法の一つとして、複数人で役割を分担し、一つのコンテンツを作り上げるというものがある。たとえば音楽制作では、作曲や作詞、編曲、そして演奏など、一つの楽曲の制作に必要な様々な役割を、それぞれの専門家で分担して行う。また映画は、大人数でコラボレーションを行う代表的な例である。映画の制作では、一本の映画に数百人もの人間が携わることも珍しくない。このように映画や音楽などは本来複数人で作成するものであるが、本来一人で作成するコンテンツを、複数人が協調的な作業によって作成することで、様々な効果を期待することがある。たとえば、古くは、連歌や連句などである。これらは、複数の人間が参加することによって加味される、作品としての独特の面白さに特徴がある。また、参加者同士の教養や能力を競うという、一種のコミュニケーションツールとしての側面も持っている。
このようなコラボレーションを、情報技術によって支援する仕組みも多数存在する。井上らは、Web上での非同期コラボレーションによって連句を作成するシステムCREWを研究開発している。CREWでは句に詠み込む季語の提案などを行っており、初心者でも容易に連句を作成できる。また、梶田らは同期型、すなわちリアルタイムなコラボレーションによって4コマ漫画を作成するシステムAB-DOKANの研究開発を行っている。AB-DOKANでは、4人程度の参加者がそれぞれ漫画の1コマを担当し、チャットを用いて互いにコンセンサスを取りながら絵を描いていき、4コマ漫画を完成させる。梶田らはAB-DOKANを用いた評価実験を行っており、コラボレーションを行うことで意外性のある面白い漫画ができやすい、と結論づけている。このように、コラボレーションの仕組みの多くはインターネットを利用し、参加者同士で同期型あるいは非同期型のコミュニケーションによってコンセンサスを得ながら、協調的にコンテンツを作成する。インターネットを介することで、時間的あるいは物理的な距離が離れているユーザ同士でコラボレーションを行えることがこれらの技術の特徴である。
また、近年、Wikipediaに代表されるように、マス・コラボレーションという考え方が一般的に受け入れられてきている。Wikipediaは、不特定多数のユーザがWebページをWebブラウザ上で編集できる、Wikiと呼ばれるCGM(Consumer Generated Media)の一種の形式をとっており、誰もが自由に事典の項目を編集することができる。その結果として170万以上にものぼる膨大な数の項目を保有しており、現在も増え続けている。マス・コラボレーションは、不特定多数のユーザがそれぞれ独立に創造的作業を行い、それぞれの成果物を統合し一つのコンテンツを構築する。不特定多数のユーザが参加することにより、必然的に、コンテンツの量および多様性が高くなり、また、参加者一人一人のコンテンツ作成能力が特に高くなくても、統合の過程で、第三者によって不備な点が発見・修正され、全体の質が保たれることが期待される。
以上のように、コラボレーションは創造的な作業に対して有効な場合があり、実際に様々なコンテンツ作成システムにおいてその仕組みが採用されている。われわれはコラボレーションをコンテンツ作成に適用した場合の効果として、次のような点に着目する。
【アイディアや知識の補完】コンテンツの作成において、異なる背景や知識、個性を持つ複数の人間が関わることにより、必然的に成果物にはその影響が生じる。ここではその影響の一つとして、ユーザ間におけるアイディアや知識の補完を挙げる。つまり複数のユーザがアイディアを出し合うことによって、ユーザ同士の知識を互いに補い合い、結果としてコンテンツの内容がより多様なものになるのである。AB-DOKANの評価実験において、意外性のある4コマができやすいことが確認されたのも、アイディアの補完が行われた一例である。またWikipediaは、不特定多数のユーザがそれぞれの専門分野に項目を投稿していけるため、専門的かつ非常に多様な項目を獲得するに至ったと考えられる。
【コンテンツの協調的な作り込み】あるユーザが作成したコンテンツに何らかの不備があった場合、そのコンテンツが複数のユーザ間で共有されていれば、他のユーザがその不備を修正することができる。Wikipediaでは項目の編集権限は基本的にすべてのユーザに対して与えられているため、特別な手続きを要せず、誰でもこのような修正を行うことができる。健全に運用されているコラボレーションシステムでは、共有されているコンテンツの改善が繰り返しなされていき、その質が次第に向上していくという効果が考えられる。
【作業効率の改善】コラボレーションを行うことが結果的にユーザ一人あたりの負担を減らすことに繋がる場合が考えられる。たとえば作成すべきコンテンツのアイディアが思いつかない場合、他者の出したアイディアに基づいてコンテンツ作成を行うことができれば、その分ユーザの負担は減るであろう。また他のユーザが作成したコンテンツを効率的に再利用することができれば、作成にかかる時間効率を向上させることができるだろう。ただし、コラボレーションによって発生するオーバヘッドにより、作業効率がむしろ悪化する場合があるので、注意が必要である。たとえば作成するコンテンツの主旨についての合意がユーザ間で得られない場合は、その意見の調停にコストが発生する可能性が考えられる。
以降、コラボレーションにおけるこれらの効果に着目し、ビヘイビアコンテンツの共有および再利用について論じる。また、第章における評価実験では、複数ユーザによってビヘイビアコンテンツの作成を実際に行い、これらの効果を確認した。
ビヘイビアコンテンツの共有
第章では、RAAに求められるロボットのビヘイビアについて論じた。本論文において繰り返し述べてきたように、ビヘイビア設計者がRAAに適切なビヘイビアを最初からすべて設計するのは困難であり、RAAでのロボット運用の中で必要に応じて随時ビヘイビアの量および質を改善していくのが理想である。第章ではビヘイビアをコンテンツとして扱う手法についても論じた。本節では、ビヘイビアコンテンツを適切に流通させて、ビヘイビアの拡充と改良を行っていく仕組みを提案する。節ではコラボレーションの効果として、「アイディアや知識の補完」「コンテンツの質の向上」「作業効率の改善」の三つに着目した。これらの効果はRAA向けのロボットを開発し運用していく中で非常に有効であると考える。ビヘイビアコンテンツの作成では、柔軟な発想や表現力、そして完成度を高める作り込みが作成者に求められる。複数の作成者の間で、それぞれが作成したビヘイビアコンテンツを共有し合うことで、コラボレーションの効果が起こり、作成者に要求される負担を軽減しつつ、コンテンツの質の向上を期待できる。
われわれは以上の目的に基づいて、ビヘイビアコンテンツの共有に必要な機能を以下のように定義する。
【あるユーザが作成したビヘイビアコンテンツを他の不特定多数ユーザが容易に取得できること】ビヘイビアコンテンツを単に複数人で共有するだけなら、コンテンツをファイルに保存し、そのファイルをFTPサーバなどにアップロードしておけばよい。しかしそれだけでは、共有を適切に運用するのは困難であり、ビヘイビアコンテンツの共有に特化したインタフェースを用意する必要がある。
【取得したビヘイビアコンテンツに対しては原作者と同様にデータ構造にアクセスできること】Web上でコンテンツを共有するサービスとしてYouTubeやFlickrなどがあるが、アップロードされたコンテンツは再編集が容易でない形に変換されている。たとえばYouTubeにアップロードされている動画ファイルには作成者が編集の際に用いたカットやトランジションなどのコンテンツの構造に関する情報は含まれていない。共有を通じてコンテンツを改良していくためには、原作者でなくても、原作者と同様の情報を利用できることが望ましい。
【取得したビヘイビアコンテンツを効率的に再利用できること】サーバ上のビヘイビアコンテンツを取得可能にしたり、コンテンツのデータ構造をそのまま再利用者に対して提供するだけでは、その再利用を効率的に行うという点に関して不十分である。ビヘイビアコンテンツの再利用を効率的に行うためには、大量に共有されているコンテンツの中から再利用すべきものだけを探すための検索技術が必要である。

図21: ビヘイビア共有システムの概要
以上の要件を踏まえ、われわれはビヘイビアコンテンツの共有システムを実装した。本システムの特徴は、コンテンツの共有サーバと、コンテンツ制作環境が密接に連動している点である。これによりコンテンツの作成と共有がシームレスに連携する。図に本システムの概要を示す。本システムはロボットの他に、ビヘイビアエディタと、ビヘイビアサーバから構成される。ビヘイビアエディタはビヘイビアサーバと連動しており、エディタの起動時には図のようにビヘイビアサーバを選択してログインを行う。ログイン後のビヘイビアエディタには、図のように、サーバ上で共有されているビヘイビアコンテンツの一覧が表示される。ユーザがエディタ上で作成したコンテンツはエディタを起動しているPCにではなく、すべてビヘイビアサーバに保存され、共有状態になる。ビヘイビアコンテンツの保存時には図のようにタイトル、コメント、カテゴリを指定する。ビヘイビアコンテンツの一覧ではここで指定したカテゴリによって階層的に分類されて表示される。
エディタと同様にロボットもまたサーバに関連付けられており、サーバ上で共有されているビヘイビアコンテンツはそのサーバに関連付けられているロボットに対して配信される。本研究ではサーバに保存されているビヘイビアの集合をビヘイビア空間と呼ぶ。ロボットはサーバに対し定期的にビヘイビア空間の更新の有無について問い合わせを行い、サーバ上のビヘイビア空間をロボットの内部にコピーする。サーバ上のビヘイビアがあるユーザによって追加あるいは編集されたとき、すべてのユーザがもつロボットのビヘイビア空間(のコピー)は更新される。

図22: ビヘイビアサーバへのログイン

図23: 共有されているビヘイビアの一覧とメタデータの表示

図24: ビヘイビアのアップロード
ビヘイビアコンテンツの再利用
われわれが提案した共有システムでは、ビヘイビアエディタを用いて作成されたコンテンツはすべてサーバ上で共有され、すべてのユーザからアクセス可能になる。ビヘイビアエディタでは、他者が作成したコンテンツを編集して投稿することができる。われわれは節において、ビヘイビアコンテンツの共有システムを設計する際の要件の一つとして、取得したビヘイビアコンテンツを効率的に再利用できることを挙げた。ビヘイビアコンテンツの再利用をより効率的に行うためには、再利用すべきコンテンツを大量に共有されているコンテンツの中から探し出すことができる検索機能が求められる。また、探し出したコンテンツを、どのようにしたら効率的に再利用することができるかを考えなくてはならない。われわれはビヘイビアコンテンツの作成においてどのような検索と再利用が行われるかを、節において定義したコラボレーションの3つの効果に対応させ考察し、その上で効率的な再利用のための仕組みを実現した。
0..16 作業効率の改善に関して
ビヘイビアコンテンツの作成における作業時間の多くは、アクションを作り込む作業に費やされる。その時間的コストを軽減することは重要な課題である。本研究におけるロボットのサーボモータは12カ所であり、サーボを1つとってみると、意味のある動作を行わせるパターンはあまり多くはないだろう。作成するべきアクションの概要が決まっている場合、既に他者が似たアクションを作成していれば、それを再利用することでアクションの作成における作業効率は向上するだろう。
われわれはビヘイビアエディタにおいて、アクションをより容易に再利用可能にするために、ビヘイビアにおけるアクションを部分的に共有し再利用する仕組みを実現した。このアクションの一部分を本研究ではアクションパーツと呼ぶ。アクションパーツは、たとえば「まばたきをする」や「右手を挙げる」といった、一つのビヘイビアにおける、再利用性の高いある基本単位である。本エディタでは、ユーザがタイムラインウィンドウ上で範囲を指定し、アクションパーツとしてビヘイビアサーバにアップロードすることができる。アクションパーツの共有画面を図(a)に示す。ユーザはビヘイビアを作成する際、アクションパーツの組み合わせで新しいビヘイビアを容易に設計することができる。アクションパーツの利用例を図(b)に示す。図(b)は、ロボットの「まばたき」を表現するシーケンスをアクションパーツとして登録し、それを一つのビヘイビアで二度利用している。

図25: アクションパーツの再利用((a)アクションパーツの一覧)

図26: アクションパーツの再利用((b)アクションパーツの使用)
0..17 コンテンツの協調的な作り込みに関して
ロボットを運用していく中で、一つのビヘイビアの完成度が、ロボット全体の印象を左右する場合がある。特に、適切でないビヘイビアが組み込まれていることによってロボットの質が下がり、RAAにとって悪影響を及ぼすことはできるだけ避けなくてはならない。適切でないビヘイビアとは、たとえばロボットの性格にそぐわないものや、条件に対して不自然なものなどである。そのようなビヘイビアは、われわれの提案手法ではビヘイビアをコンテンツとして共有することによって複数人の作成者が協調的に修正と改良を行っていくことを期待している。経験上、ビヘイビアの良し悪しは、ロボットへ組み込んで他のビヘイビアとのバランスを見たり、さらには実際にRAAで試してみたりしないと分からない事が多い。そのため、動いているロボットのふるまいを見て、その中から不適切なものを発見したユーザが、それをビヘイビアエディタで探して修正するという作業が必要になり、そのための検索が求められる。つまり「どのような動きなのか」という、アクションの内容をクエリとした検索である。
われわれはビヘイビアエディタにビヘイビアコンテンツの検索機能を実装した。その検索画面を図に示す。この検索機能では、タイトルやコメントおよび発話内容に含まれる文字列、作成者、アクションの再生時間、アクションで使用するサーボモータの部位などを指定してビヘイビアコンテンツを検索することができる。
節では、ビヘイビア共有にアクションパーツの概念を導入した。これは単にビヘイビア設計のコストを下げるためだけでなく、ビヘイビアに意味的な構造を与えるためでもある。ビヘイビア共有では、共有されているビヘイビアが増加した場合、目的のビヘイビアを効率的に検索することが必要になると考えられる。しかしビヘイビアとは、サーボモータを動作させるシーケンスの集合に過ぎず、そのシーケンスがどのような意味内容を表現しているのかを機械的に推定することは困難である。そこで、本研究ではアクションパーツを、ビヘイビアコンテンツに関する意味内容の構造化の一つとして位置づけ、ビヘイビアの検索に利用する。本エディタにおける検索機能では、アクションパーツの内容をクエリとした検索を行うことができる。これにより、ビヘイビアにアクションパーツが適切に設定されていれば、たとえば「『まばたき』しながら『首をかしげている』ビヘイビア」といったような、ビヘイビアの意味内容に関する検索が可能になる。

図27: ビヘイビアコンテンツの検索
0..18 知識やアイディアの補完に関して
RAAの運用の中では、作成するべきビヘイビアのコンディションだけがあらかじめ決まっていて、それに応じたアクションを作成したい場合がある。たとえば、ロボットを長時間放置していたときに、寂しそうにするビヘイビアを作りたいというような場合である。このときビヘイビア作成者は、ロボットの寂しい感情を表現するには、どのようなふるまいをさせればいいのか、試行錯誤することになる。他者の作成した「寂しいとき」のビヘイビアを見たい、というクエリで検索することができれば、検索結果のビヘイビアを見ることで、発想の参考にすることができるだろう。逆に、まだ他者の作成していないような独自性のあるビヘイビアを作成したいときにも、このような検索を行う必要があるだろう。
われわれは本エディタのビヘイビアコンテンツの検索機能では、感情によるビヘイビアコンテンツの検索を実装した。第章で述べたように、本ロボットにおいて感情は、不快-快を0.0から1.0の間の値で表す変数 arousalで表現される。Russeelらによれば、この2変数でさまざまな基本感情を表現することが可能である。しかし、感情によってビヘイビアコンテンツを検索する際に、これら2変数の値をユーザが直接数値で指定するのは、直感にそぐわず、あまり現実的ではない。そこで、
arousalの直交した2軸で表現される感情空間(Pleasure-Arousal空間、前章の図を参照)を13の基本感情に分割し、その基本感情を指定することによって検索を行う仕組みを実装した。ここで用いる13の基本感情は、「通常」「驚き」「興奮」「喜び」「幸福」「落ち着き」「安堵」「眠い」「退屈」「悲しみ」「苛立ち」「緊張」「恐怖」である。検索画面(図)では、これらの基本感情がそれぞれチェックボックスで表示されており、ユーザはその中から選択し、検索を行うことができる。またその時に、「感情の検索範囲」と書かれたスライダがあり、感情検索の照合の閾値を設定することができる。
以下で、感情検索の仕組みについて説明する。図に示したPleasure-Arousal空間の中で「通常」の座標をpleasure,
としたときの、各基本感情の座標を表のように定義した。検索画面においてチェックされた基本感情の座標と、検索対象となるコンディションにおける感情の座標との距離を計算し、その距離が閾値以下の場合は合致と見なす。このときの閾値は、「感情の検索範囲」スライダで設定した値であり、スライダ上の「狭い-広い」は、0.1から0.5に割り当てられている。
また、検索画面における検索条件はAND検索であり、指定したすべての条件に合致するビヘイビアコンテンツが検索結果となる。ただし基本感情のチェックボックスに関しては、OR検索であり、指定された基本感情のうちどれか一つでも合致すれば、それが検索結果となる。これは、基本感情同士は基本的に独立しており、1つのビヘイビアコンテンツが複数の基本感情にを含むことはあまりないと考えたためである。
本章のまとめと考察
本章ではまず、コンテンツ作成におけるコラボレーションの効果について考察を行った。コラボレーションにおける重要な効果として、「作業効率の改善」「コンテンツの協調的な作り込み」「アイディアや知識の補完」という3つの効果に着目した。そしてビヘイビアコンテンツを作成する際に、作成者同士でそれを共有することによりこれらの効果が得られ、より効率的に、より優れたビヘイビア設計を行うことができるという仮説を立てた。この仮説に基づき、本章では、共有と再利用によってビヘイビアコンテンツを作成する手法について提案し、実装を行った。この仮説の検証については、次章の評価実験によって行う。われわれは本研究において開発しているロボットを用いて、RAAの予備実験を2006年度より複数回行ってきた。その中で利用するビヘイビアの設計は筆者が行ってきたが、筆者個人の発想には限界があり、心理学的な知見やAAAの臨床例を参考にするだけでは、十分な種類のビヘイビアを用意するのは困難であった。RAAにとって有効なビヘイビアを用意するためには専門的な知識やRAAの運用ノウハウが必要であるが、それだけでは不十分であると筆者は経験的に感じている。ビヘイビアの良質なアイディアを出すためには、節で述べたコラボレーションの例のように、異なる個性を持った複数の人間が関わる必要性があるだろう。RAAの専門家でないユーザが作成したビヘイビアコンテンツは、必ずしもRAAにとって適切ではないかも知れない。しかし、アイディアを出すという点に関しては複数人の素人が行い、集まったビヘイビアコンテンツの中から適切なものを専門家が選択することで、専門家の負担を軽減することができるだろう。
評価実験
第章ではコラボレーションがビヘイビアコンテンツの作成に有効であるという仮説を述べ、その根拠として、以下の3つのコラボレーションの効果を挙げた。
-
アイディアや知識の補完
-
コンテンツの質の向上
-
作業効率の改善
われわれはこれらの効果を期待して、コラボレーションによってビヘイビアを設計する仕組みを実装した。ビヘイビアコンテンツを複数のユーザ同士で共有および再利用を行うことで、それらを行わなかった場合に比べ、上記の点において優れていること想定している。本章では被験者実験を行い、これらの効果がどの程度得られたかについての評価を試みる。
実験手順
本論文の中で実装した被験者にビヘイビアエディタを使用してもらい、指定した課題に沿ったビヘイビアコンテンツを作成してもらった。その際に、他のユーザとのコンテンツ共有および再利用を、許さないグループ(Aグループ)と、許すグループ(Bグループ)の2つのグループに被験者を分けた。本実験では、被験者が作成したビヘイビアコンテンツの質的および量的な差をグループ間で比較した。
被験者としては、RAAの経験を持たない、22歳から27歳の男女8名を選出した。AグループとBグループには、それぞれ4名ずつの被験者を割り当てた。本実験において、両グループの被験者に共通して許可した操作は以下の通りである。
-
ビヘイビアサーバにログインする。
-
新しくビヘイビアコンテンツを作成し、編集する。
-
読み込んだビヘイビアコンテンツをエディタ上で再生する。ただしロボットの実機は用いない。
-
編集したビヘイビアコンテンツをサーバにアップロードする。
-
サーバ上にアップロードされているビヘイビアコンテンツの一覧を見る。
-
サーバ上にアップロードされているビヘイビアコンテンツを一覧から選択して読み込み、編集する。つまり、自分が作成したビヘイビアコンテンツを編集する行為は両グループに共通して許されている。
被験者は、指定された課題に基づいてビヘイビアコンテンツを作成する。実際には、作成課題がビヘイビアコンテンツにおけるコンディションにあたるため、被験者が作成するのはビヘイビアコンテンツにおけるアクションの部分だけである。今回の実験では被験者がロボットの開発と運用に携わった経験が無いため、作成に経験的な知識が求められるコンディションおよびエフェクトは省略し、ビヘイビアコンテンツにおいて最も重要な要素である、アクションの作成のみに限定した。両グループ共に、作成するビヘイビアコンテンツの数は、課題ごとにそれぞれ3つ以上ずつとする。作成個数を3つ「以上」としたのは、3つ以上作成するアイディアや能力を持った被験者からはより多くのビヘイビアコンテンツを得ようと考えたためである。課題は両グループに共通し、合計4つを指定した。課題の内容は図に示す。なお、今回の実験にあたり、実験手順の説明を行った被験者向けのWebページを用意し、被験者にはそのWebページを見せた。図における文言は、そのWebページで使用したものをそのまま引用した。
【課題1: 「楽しいとき」のアクションを作ってください。】ロボットが、今「楽しい」と感じているときに起こすアクションを考えてください。見ていて楽しくなるものを期待しています。【課題2: 「ヒマなとき」のアクションを作ってください。】誰も相手にしてくれなくて、「ヒマ」「さみしい」「つまらない」「だれかにかまって欲しい」、そんな感情を表現するアクションを考えてください。ついついかまってやりたくなるアクションを期待しています。【課題3: 「わくわく」しているときのアクションを作ってください。】これから何か楽しいことが起こるかもしれない、そんな「わくわく」感を表現するアクションを考えてください。課題1と似ていますが、こちらはまだ楽しいことが起こっておらず、これから何かいいことがあるといいな、という状態です。【課題4: 「あること」を話しかけられたときのアクションを作ってください。】この課題については詳しく説明します。ロボットの手を握っている間、ロボットは音声認識をおこないます。その際に、「何を話しかけられたとき」「どのようなアクションをするか」を考えてください。「何を話しかけられたとき」のアクションなのかは、保存時のコメントに書いておいてください。 これを、必ず1つ以上(指定可)具体的に指定してください。書式は指定しませんが、たとえば、次のようなコメントを書いてください。screen右手を振って元気よく挨拶する。条件:「こんにちは」もしくは「ごきげんよう」と話しかけられたときscreenまた、次のような、抽象的な指定方法は禁止します。screen右手を振って元気よく挨拶する。条件:挨拶をされたときscreenscreenビヘイビアコンテンツの作成課題(被験者への説明文より引用)fig:exp.kadaicenterfigure
本実験では、被験者8名に対してそれぞれ1台ずつ、合計8台の独立したビヘイビアサーバを用意した。Aグループの被験者に対し、サーバ
を、Bグループの被験者
に対し、サーバ
を割り当てた。被験者にはあらかじめビヘイビアエディタを配布し、各自のPCにインストールしていただいた。被験者はビヘイビアエディタを起動した後に指定されたサーバにログインし、ビヘイビアコンテンツを作成してアップロードする。両グループ共に、割り当てられたサーバ以外のサーバにログインすることは禁止した。つまり、所属するグループに関係なく、すべての被験者が使用するサーバは完全に独立している。ただしBグループのサーバ
に対しては、実験の期間中に、3度に渡り、それぞれのサーバにアップロードされたビヘイビアコンテンツをサーバ間で統合した。この統合については後述する。
次に、実験のスケジュールについて説明する。実験手順の都合上、スケジュールはAグループとBグループで異なる。Aグループでは、一週間程度の期間を設けた。期間内に、4つの課題についてそれぞれ3つ以上ずつのビヘイビアコンテンツを作成し、自分に割り当てられたサーバにアップロードする。このときAグループの被験者は、取り組む課題の順番については自由とした。たとえば最初に課題3のビヘイビアコンテンツを1つだけ作り、その次に課題1に取り組み、また課題3に取り組む、といった行為も許した。
一方Bグループでは、第1回から第4回の計4回に分けて実験を行った。1回分の実験期間は日程度である。Bグループの被験者はAグループとは異なり、取り組む課題の順番は自由ではなく、表に従う。回と回の間には、それぞれのサーバにアップロードされたコンテンツをサーバ間で統合した。この統合の様子を図に示す。第1回では、4人の被験者は、割り当てられた課題についてそれぞれ3つ以上ずつのビヘイビアコンテンツを作成する。このとき、4人のサーバはそれぞれ異なるので、第1回の実験では、被験者は他者の作成したビヘイビアコンテンツを参照することはできない。第1回が終了した後、第1回で4人が作成したコンテンツを筆者が集めて統合し、サーバ
に再分配する。この統合によって、サーバ
には、第1回において作成された4人分のコンテンツがアップロードされた状態になる。つまり第2回の実験では、第1回で作成された他者のコンテンツを閲覧したり、再利用することができる。同様に、第2回の終了後においても統合作業を行うので、第3回の実験では第1回と第2回で作成された他者のコンテンツを参照できる。なお、AグループとBグループの違いは、スケジュールの違いと、統合操作の有無の違いだけである。
1台のサーバを複数のユーザが使用し、共有を行うのが本システムの本来の使い方であるが、Bグループにおいてあえて4台のサーバに分けて共有を行ったのは、参照できるビヘイビアコンテンツの数を4人の被験者の間で平等にするためである。1台のサーバで共有を行った場合、早くに実験に取り組んだ者と、そうでない者との間で、参照できるビヘイビアコンテンツの数が異なってしまい、実験の上では不都合が生じるのである。
|
被験者 |
第1回 |
第2回 |
第3回 |
第4回 |
|
B_1 |
課題1 |
課題2 |
課題3 |
課題4 |
|
B_2 |
課題2 |
課題3 |
課題4 |
課題1 |
|
B_3 |
課題3 |
課題4 |
課題1 |
課題2 |
|
B_4 |
課題4 |
課題1 |
課題2 |
課題3 |

図28: Bグループにおけるビヘイビアコンテンツの統合(被験者B1の場合)
実験結果
Aグループの実験は2007年12月23日から31日までの計9日間かけて行った。Bグループの実験は、2007年12月23日から25日まで、12月27日から29日まで、2008年1月3日から5日まで、1月8日から9日までの計4回、11日間かけて行った。
実験で作成されたビヘイビアコンテンツの数を表に示す。各被験者は1人あたり計12個以上のビヘイビアコンテンツを作成することになっていたが、Aグループの被験者では12個より多くの数を作成した被験者はいなかった。一方Bグループでは、4人全員が12個より多くのビヘイビアコンテンツを作成していた。Bグループでは一人あたりの平均作成個数は15.75個であり、Aグループの約131.3%多い。結果としてAグループでは計48個、Bグループでは計63個のビヘイビアコンテンツが作成された。
|
被験者 |
課題1 |
課題2 |
課題3 |
課題4 |
合計 |
|
A_1 |
3 |
3 |
3 |
3 |
12 |
|
A_2 |
3 |
3 |
3 |
3 |
12 |
|
A_3 |
3 |
3 |
3 |
3 |
12 |
|
A_4 |
3 |
3 |
3 |
3 |
12 |
|
B_1 |
3 |
4 |
4 |
3 |
14 |
|
B_2 |
3 |
4 |
3 |
9 |
19 |
|
B_3 |
3 |
3 |
3 |
4 |
13 |
|
B_4 |
4 |
5 |
3 |
5 |
17 |
続いて、客観的な数値に基づいてビヘイビアコンテンツの質の評価を試みた。質の指標としては、「アクションに含まれる要素の数」を選んだ。アクションに含まれる要素とは、図中において丸印で示したように、サーボモータの値や発話内容を指定するための編集点である。この数が多いほど作り込みがなされていると見なし、質に関する指標の一つになると考える。1つのアクションあたりに含まれる平均要素数を調査した結果を図に示した。図(a)は被験者ごとの平均値であり、図(b)はグループごとの平均値である。1つのアクションあたりに含まれる平均要素数を比較すると、BグループではAグループに比べて約142.6%多いことが分かる。

図29: アクションに含まれる要素

図30: 1つのアクションあたりに含まれる要素数の比較((a)被験者ごとの平均値)

図31: 1つのアクションあたりに含まれる要素数の比較((a)グループごとの平均)
次に、実験における再利用の効果を確認するために、作成されたビヘイビアコンテンツの中で、他のビヘイビアコンテンツを再利用して作成されたものの個数を調べた。その結果を表に示す。ここで、「なし」「自分」「他者」とあるが、「なし」は再利用が行われずに作成されたものを指し、「自分」は自分が作成したものを再利用した場合を指し、「他者」は他者が作成したものを再利用した場合を指す。共有の効果は「他者」の再利用に表れるはずであるため、ここでは「他者」の再利用に着目する。表を見ると、Bグループにおいて作成された63個のビヘイビアコンテンツのうち、22個(31.7%)が「他者」の再利用によって作成されたものであることが分かる。
|
なし |
自分 |
他者 |
総計 |
|
|
Aグループ |
38 |
10 |
0 |
48 |
|
Bグループ |
37 |
4 |
22 |
63 |
続いて、再利用の有無と、ビヘイビアコンテンツの作成効率の関係を調べた。これは、コラボレーションの効果として挙げたうちの、「作成効率の改善」に相当する。これを調べるためにはまず作成効率の算出方法をまず定義する必要がある。ここでは、あるビヘイビアコンテンツの作成効率を式のように定義する。equationeq:exp.efficiencyビヘイビアコンテンツの作成効率[1/s] = アクションに含まれる要素数作成に要した時間[s]equationつまり、1秒あたりに作成した要素数を作成効率として定義した。この値が大きいほど、複雑なビヘイビアコンテンツを短時間で作成したことになり、より作成効率がいいといえるだろう。なお、式における「作成に要した時間」(以下、作成時間と呼ぶ)は、新規作成ボタンを押すか、もしくは他者のビヘイビアを読み込んだ時点から、サーバへアップロードした時点までの時間を指す。作成時間には、これ以外の時間、たとえばアイディアを出すために悩んだ時間などは含めないものとする。以上のように定義に基づいて計算した作成効率が、共有や再利用の有無によってどのように変化するかを調べた。その結果を図に示す。まず、再利用が行われなかったビヘイビアコンテンツの、1個あたりの平均作成効率は、AグループとBグループに有意な差は見られなかった。Bグループでは、「他者」の平均作成効率は、再利用を行わなかったものと比べて、約212.7%の向上が見られた。また、「自分」の平均作成効率と比べても、約176.3%向上していることが分かる。
本実験の被験者8名に対して、共有と再利用に関するアンケート調査を行った。その結果を表、表、表に示す。アンケートには、Aグループ・Bグループの共通項目(表、表)と、Bグループ専用に用意した項目(表)がある。アンケート結果からは、AグループとBグループにおける特徴的な差として、被験者のモチベーションの違いが確認できる。Bグループを対象にしたアンケートの回答では「楽しかった」という表現があるが、Aグループの回答にはそのような表現は無かった。Bグループの被験者はビヘイビアコンテンツを共有しながら作成していく行為に楽しさを見出し、高いモチベーションを得ることができ、Bグループにおける心的な負担はAグループに比べて低かったと考えられる。またBグループの回答からは、共有によってアイディアの参考になったり、自分では思いつかなかった発想を得たということを4人全員が回答している。また、Bグループにおいて、Aグループよりも多くのビヘイビアコンテンツが作成された理由を調べるために、「4つ以上のビヘイビアを作成した理由」をBグループのアンケート項目(自由記述)として用意した。この項目に対しては、4人中3人が「楽しかった」、4人中2人が「他の人が参考にできるように」と回答している。この回答からも共有に対する高いモチベーションがうかがえる。このモチベーションの原因としては、この被験者自身が、共有における何らかの効果を実感しているためであると考えられる。このように活発な共有と再利用が行われていくことは、本システムの運用において非常に重要である。
|
質問 |
回答(Aグループ) |
回答(Bグループ) |
|
作成したビヘイビアについて、苦労した点や、工夫した点 |
全部のモータを動かすようにして、動物らしさを出した(1)/まず単純なアクションを作成し、それを再利用して複数のアクションを作成した(1)/1課題につき3つずつ考えるのが大変だった(1)/音声合成の発音の微調整ができず、使いたいせりふが使えない事があった(2)/腕が2軸あるので動きを指定するのが難しかった(1) |
せりふとサーボを同期させるのが難しかった(1)/丁度いいテンポになるように工夫した(1)/単調にならないように気をつけた(1)/値の微調整に苦労した(1)/音声合成の発音の微調整ができず、使いたいせりふが使えない事があった(2)/腕が2軸あるので動きを指定するのが難しかった(1)/サーボでの表現力が乏しいのでせりふでなんとかした(1) |
|
実験期間は十分だったか(5段階評価) |
3/3/3/5/平均3.25 |
4/5/4/3/平均4.0 |
|
ビヘイビアを作成するための機能は十分だったか(5段階評価) |
4/4/2/4/平均3.5 |
2/2/3/3/平均2.5 |
|
ビヘイビアエディタに欲しい機能 |
コピー&ペースト(4)/時間的を引き延ばしたり縮めたりする機能(1)/アンドゥ(1) |
コピー&ペースト(4)/自然な音声合成(2)/Wavファイルの一部だけを再生(1)/多重起動(1)/まゆげやひじを動かしたい(1)/スライダウィンドウの位置が邪魔(1) |
|
自分の作成したビヘイビアを再利用した理由 |
共通して使えそうな動きを再利用したかった(2) |
共通して使えそうな動きを再利用したかった(1)/簡単にバリエーションを増やせるから(2)/せりふだけが違うビヘイビアを複数作りたかった(1) |
|
自分の作成したビヘイビアを再利用しなかった理由 |
なるべく違った動きにしたかった(1)/再利用する部分が無かった(2) |
新しいビヘイビアを作りたかったから(1) |
|
質問 |
回答(Aグループ) |
回答(Bグループ) |
|
課題1の感想 |
3種類考えるのが大変だった(2)/アイディアが出やすかった(1) |
せりふを先に決め、それに合わせて動きを付けた(1)/自分が考えたものがすでに作られていた(1)/「楽しさ」を表現するのが難しかった(1) |
|
課題2の感想 |
3種類考えるのが大変だった(3)/「寂しさ」を表現するのが難しい(1) |
「暇なとき」を表現するのが難しい(2)/最初の課題だったので参考にするものが無く難しかった(1)/肩関節の可動範囲が足りない(1)/最初の課題だったので参考にするものが無く難しかった(1) |
|
課題3の感想 |
3種類考えるのが大変だった(2)/一番難しかった(1)/課題1との違いが分からなかった(1)/わくわく感の表現が難しい(1) |
わくわく感の表現が難しい(1)/ひじの関節が欲しい(1)/最初の課題だったので参考にするものが無く難しかった(1) |
|
課題4の感想 |
話しかける内容が思いつかなかった(1)/アイディアが出やすかった(2) |
話しかけられる場面を想定するのが苦労した(2)/自由度が高いので一番楽しかった(1) |
|
その他感想 |
大変だった(1)/他者の作品を見てみないと想像力がわかない(2)/ひじやまゆげなどを動かせるといい(1) |
ロボット実機を使いたかった(1)/関節が少なく、表現力に限界があった(1)/他者の作品を見られたのは面白かった(1)/作品を共有できるので作るのが楽しかった(1) |
|
質問 |
回答(Bグループ) |
|
他者とのコラボレーションは役に立ったか(5段階評価) |
4/5/5/4/平均4.5 |
|
コラボレーションのどのような点が役に立ったか |
使い回しができる・手間の軽減(3)/アイディアの参考になる(4)/ロボットの表現力が乏しいのでかえって再利用しやすかった(1)/面白い作品を見て刺激を受ける(1) |
|
他者のビヘイビアを再利用せずに作成したビヘイビアも、他者の発想から何らかの影響を受けたと思うか |
はい(3)/いいえ(1) |
|
どのような影響を受けたか |
自分では思いつかなかった発想を得た(3) |
|
4つ以上のビヘイビアを作成した理由(1) |
楽しかったから(3)/自然に思いついたから(2)/自分が作ったものを作り込みたかったから(1)/他の人が参考にできるように(2)/満足するものができると嬉しかったから(1) |

図32: 共有や再利用の有無による平均作成効率の関係
考察
本節では、「作業効率の改善」「コンテンツの質の向上」「知識やアイディアの補完」という3つの観点から、実験結果に対する考察を行う。
0..19 作業効率の改善に関して
ビヘイビアの平均作成効率の比較では、共有・再利用を行ったBグループの方が、行わなかったAグループよりも作成効率が高いことが分かった。Bグループの中でも、自分の作成したものを再利用した場合の作成効率と、他者の作成したものを再利用した場合の作成効率を比較すると、後者の方が約212.7%高かった。この結果を一見すると、直感に反するように思われる。なぜならば、他者の作成したものを再利用する場合には、共有によるオーバヘッドが発生するからである。オーバヘッドとしては、たとえば、他者の作成物を再利用したい場合は、再利用すべきコンテンツを探し、そのコンテンツを理解するという手間が考えられる。
そのようなオーバヘッドが存在するにも関わらず、なぜ他者の作成物の再利用が高い作成効率を示したのだろうか。その原因を調べるために、他者からの再利用で作成されたコンテンツの中身を調べた。セリフを変えたり手の動きを追加したりなど、簡単な修正でビヘイビアのバリエーションを増やす行為が多く見られ、そのような行為が効率化に繋がったと考えられる。この行為が行われたのは、本論文においてコラボレーションの効果として挙げた、「知識やアイディアの補完」の効果であると思われる。
また、コラボレーションのどのような点が役に立ったかというアンケート項目(自由記述)に対し、4人中3人が、「使い回しができる・手間の軽減」と回答しており、今回の実験では共有が作成効率の向上に役立ったことを被験者が実感できている。
0..20 コンテンツの質の向上に関して
Bグループでは、他者の作成したものを再利用し、改良を加えた行為が確認された。たとえば、「未完成」というタイトルでアップロードされた完成度の低いビヘイビアに対して、他者が改良を加えるという行為が行われている。この改良を図に示した。「未完成」ビヘイビアは課題1に対して作成されたものであり、1秒かけて両手を挙げ、また1秒かけて下ろす、という行為を繰り返す。つまり、「万歳」の動作を表現していると思われる。改良されたものは、これに表情やせりふを加えることで、より自然な「万歳」を表現している。両手の動きについても、速度の調整がなされている。「未完成」ビヘイビアには、「なんかいいネタが思い浮かばなかったのでそのまま保存しておきます。」(原文まま)という作成者によるコメントが付けられている。これを作成した被験者はアンケートで、「課題1は最初(第1回)の課題だったので他者の作品が参考にできず、2つしか思い浮かばなかったのでとりあえず未完成のままアップロードした」と回答している。
筆者の判断(作り込みの度合いや完成度などを目視によって比較)によれば、この「未完成」の他にも、他者のビヘイビアコンテンツを再利用して作成された22個のうち、8個は再利用によってこのような改良がなされている。このように、RAAおよび共有システム相互に運用していく中で、完成度の低いビヘイビアがアップロードされていても、他者によって改良がなされていくことが考えられる。

図33: ビヘイビアの作り込み再利用とそれによる質の向上の例((a)被験者B3が作成した「未完成」のビヘイビア)

図34: ビヘイビアの作り込み再利用とそれによる質の向上の例((b)被験者B1による改良)
0..21 知識やアイディアの補完に関して
「コラボレーションのどのような点が役に立ったか」というアンケート項目(自由記述)に対し、Bグループの被験者は4人中4人が、「アイディアの参考になる」と回答している。また、「再利用を行わずに作成したビヘイビアも他者の発想から何らかの影響を受けたと思うか」という項目(自由記述)に対しては、4人中3人が「自分では思いつかなかった発想を得た」と回答している。このことから、共有によってアイディアがユーザ同士の間で相互に補完されたことが確認できた。
ただし、共有することによって得られるアイディアというのは、RAAのために多様なビヘイビアを収集するという目的に対しては必ずしも効果があるわけではない。たとえば「こんにちは」と挨拶を行うビヘイビアを見て、挨拶を行わせるというアイディアを得、「こんばんは」を作成するということがある。これは挨拶の種類を増やすことには役立つが、挨拶以外のアイディアへ飛躍することは稀であると考えられる。つまり、共有されているビヘイビアから連想できないアイディアについては、われわれの提案手法では支援されない。しかし、本システムのユーザを大量に集めることができれば、このようなアイディアの多様性の問題はWikipediaのようなマス・コラボレーションによって解決するだろう。
1 関連研究
本章では、本研究に関連のある研究を紹介し、本研究との関連性や差分などについて論じる。本研究の性質上、関連する研究分野は多岐にわたるが、ここでは、RAAに関するもの、コラボレーションに関するもの、ビヘイビアコンテンツに関するものについて紹介する。
1.1 RAAに関して
近年、各社から低価格なペットロボットが販売されており、RAAの研究はますます盛んになってきている。本節では代表的なRAA研究を紹介する。
1.1.1 PAROを用いたRAA
PAROは、柴田らが研究開発しているアザラシ型のロボットである。2002年にはMost Therapeutic Robot(世界一の癒しロボット)としてギネスブックに登録された。また、市販されており、RAAによく用いている。PAROには、朝・昼・夜のリズムがあり、眠くなったり、活発に行動したりする。また、視覚、聴覚、触覚、運動感覚などがあり、光の変化を感じたり、名前を学習したり、挨拶や褒められる言葉などを理解したり、なでられたり、叩かれたり、抱き上げられたりすることを感じる。このような人とのふれあいから、PAROにも心や感情があるかのように内部の状態が変化し、反応の仕方が変わったり、鳴き声を出したり、飼い主の好みの行動を学習する。
PAROはRAAを目的に1993年から研究開発された。デイサービスセンター、介護老人保健施設、特別養護老人ホーム、小児病棟、児童養護施設などで、数多く、長期間に渡る実験を続けることにより、アニマル・セラピーと同じ効果を得られることが確認されている。
なお、PAROには本研究で提案したような、本研究におけるビヘイビアに相当するものを、ユーザがプログラミングできる機能は搭載されていない。
1.1.2 AIBOを用いたRAA
AIBOは1999年から2006年にかけてソニー(株)が販売した犬型ロボットである。4足歩行ができ、歩き回れるのが特徴である。また、AIBOの動作はユーザがプログラミングすることができ、PC上で動作する専用ソフトウェアで作成したプログラム(本研究におけるビヘイビアに相当するもの)をメモリースティック経由で導入することができる。このことから、RAAや、ヒューマン・ロボット・インタラクション研究によく利用されている。本研究においてもビヘイビアをユーザが作成するための仕組みを実装したが、われわれのビヘイビアは局所的ふるまいを規定するものであり、AIBOにおけるそれとは性質が異なるものであるといえる。
AIBOにはあらかじめ様々な行動が実装されており、ユーザとのインタラクションを通して段階的に行動を開放していくことで、成長しているように見せかけている。しかしこれはあくまで成長しているかのように見せかけているだけである(擬似学習)。田中らは、そのような疑似学習について、「成長しきった状態ではユーザはAIBO のふるまいに変化を感じられず、飽きの原因になる」と指摘し、「犬を躾るように、お座り・お手を学習させる」という学習機能を実装し、AIBOに組み込んだ。田中らは被験者実験を行った結果、「擬似学習による学習」よりも、「インタラクションを通して得た情報に基づいた学習」の方が、ユーザがインタラクションで得られる楽しさが大きかったとしている。
われわれの提案したビヘイビアコンテンツでは、田中らのがAIBOに実装したような学習能力を記述することは困難である。しかし、本論文における提案手法では、ビヘイビアをユーザが作成し共有することによってビヘイビアを質的・量的に変化させ、「疑似学習に対する飽き」に対処するアプローチとしている。
1.2 コラボレーションに関して
本研究ではロボットのビヘイビアの作成手法として、複数ユーザによるコラボレーションを採用している。これはビヘイビアを創作性のあるコンテンツの一種としてみなすことにより、コラボレーションの効果によってコンテンツが洗練されていくことを期待したものである。本節ではコンテンツ制作におけるコラボレーションの効果の影響に着目し、関連研究を挙げる。
1.2.1 多人数リアルタイム型4コマ漫画作成支援システム
梶田らは、コラボレーションによって4コマ漫画を作成するシステムAB-DOKANを提案している。4コマ漫画は、基本的には起承転結を表す4つのコマからなる漫画である。AB-DOKANでは、基本的に1コマを1人が担当し、1から4人程度のユーザがリアルタイムのコラボレーションによって漫画を制作する。その際、チャット機能によって制作する漫画の内容を話し合うことができる。AB-DOKANを用いた評価実験では、コラボレーションの有無によって漫画の面白さがどう変化するかを評価しており、コラボレーションを行った方が、1人のときより面白い漫画が作られる傾向があったとしている。また、コラボレーションを行うと物語の展開の意外性を生みやすいという考察がなされている。4コマ漫画では一般的に、展開の意外性が面白さに繋がるため、コラボレーションは4コマ漫画の制作にとって有効であるとしている。梶田らの実験で観察されたように、意外性は、コラボレーションによるコンテンツ制作における重要な効果の一つであると考えられる。
コラボレーションによって一つの絵画を制作するシステムは多く提案されているが、梶田らのシステムは4コマ漫画という物語性のあるコンテンツを扱っているという点において新規性がある。われわれの提案しているビヘイビアコンテンツは単体では物語性を持たないが、ビヘイビアの集合を一台のロボットで運用したとき、ロボットというメディアを通して一種の物語性をもつと考えている。4コマ漫画では、コラボレーションによる意外性が物語に面白みを与えることが梶田らによって確認されたが、同じく物語性を持ったメディアであるビヘイビアにとって、意外性がどのように働くかは考察する必要がある。
1.2.2 Wikipedia
Wikipediaは、オンライン百科事典である。Wikipediaは、不特定多数のユーザがWebページをWebブラウザ上で編集できる、Wikiと呼ばれるCGM(Consumer Generated Media)の一種の形式をとっており、誰もが自由に事典の項目を編集することができる。その結果として170万以上にものぼる膨大な数の項目を保有しており、その数は現在も増え続けている。不特定多数のユーザが匿名によるマス・コラボレーションで項目を編集するため、事典項目の信憑性については疑問視されることがあるが、出典の記されていない情報や、不適切な表現などについては、善意による修正が活発になされている様子が見受けられる。このことは、本研究において着目したコラボレーションの効果である、「コンテンツの質の向上」に関連している。
本論文では、ユーザ同士の合意形成の手法については触れなかった。項目ごとに用意されている「ノート」と呼ばれる掲示板機能で、項目の編集方針がユーザの間で議論できるようになっており、コラボレーションにおける合意形成の手法として参考になる。
Wikipediaでは、良質な記事が書かれた項目を大量に保有する一方で、悪意のある書き込みを故意に行ういわゆる「荒らし」行為や、対立する主張を持つ複数のユーザ同士が一つの項目を編集し合う「編集合戦」、特定の業者が自社に都合のいいように記事を改編する行為など、大規模なコラボレーションメディアならではの興味深い現象を見ることができる。われわれの提案手法を大規模に運用する場合には、これらのようなコラボレーションによる負の効果についても考慮する必要がある。
1.3 ビヘイビアコンテンツに関して
ロボットのビヘイビアをユーザが作成し、コンテンツとしてユーザ同士で共有するという概念を取り入れている研究を紹介する。ただし、筆者の調べた限りでは、本研究のようにロボットのビヘイビアの局所的なふるまいをコンテンツとして共有するという概念を提案している研究は、本研究以外には見つからなかった。
1.3.1 状況依存モジュール
神田らは、状況依存モジュールと呼ばれる単位でロボットのビヘイビアを設計する開発環境と、それを組み合わせて動作させる制御アーキテクチャを提案した。状況依存モジュールのデータ構造は本研究におけるビヘイビアコンテンツと似ており、前提条件部(本研究ではコンディション)と行動部(本研究ではアクションとエフェクト)の指定からなる。複数のモジュールを組み合わせることで、複雑なふるまいを記述できる。神田らの提案手法が優れている点は、ロボットの開発過程を強く意識しているという点である。状況依存モジュールは、本研究のビヘイビアと同様に、一部分を入れ替えてロボットを改良していく行為が容易になるように設計されている。
われわれはRAA向けのロボットを開発しており、生き物らしさを追求し、ユーザを飽きさせないロボットを開発するという目的がある。状況依存モジュールを利用したアーキテクチャでは、移動ロボットのビヘイビアの改良を、タスクの成功や失敗をもとに、機械学習によって支援する。しかしコミュニケーションロボットにおいては、インタラクションには必ずしも正解がないため、機械学習という手法を採用するのは困難である。そこで、われわれの提案手法のように、ユーザの意見をコラボレーションによって取り入れることでロボットを改良するという手法は、RAAにおいて有効であると考える。
1.3.2 ヒューマノイドロボット用ビヘイビアコンテンツ
岡田らは、Webブラウザ上で動作するヒューマノイドロボットの物理シミュレーション環境および、その環境で実行できるビヘイビアの設計ソフトウェアを開発している。岡田らは文献の中で、次のように述べている。
本研究の着眼点はハードウェアから切り離したヒューマノイドのビヘイビア記述と、これを実行するヒューマノイドのシミュレーション環境により、一般のエンドユーザを含めて幅広くヒューマノイドのビヘイビアを実行できる環境を実現することで、多数のユーザによるビヘイビアの評価や、さらにはヒューマノイドロボットのビヘイビアがコンテンツとして流通するといったロボット研究の新しい展開を図るものである。
ロボットのビヘイビアをコンテンツとして流通させるという概念を提唱しているという点において、岡田らの研究は本研究に先行している。しかし、ビヘイビアを流通するコンテンツとして扱うために必要な、より共有に適したデータの構造化や、適切に共有するための工夫などについては言及されていない。
1.3.3 Modulobe
江渡らは、ブロック玩具のような単純なモジュールを組み合わせることによって仮想生物を作ることができる物理シミュレーション環境 Modulobeを提案した。マッチ棒のような棒状のオブジェクトを組み合わせ、オブジェクトの接続部分に周期的な動きを指定することで仮想生物(モデル)を作成し、3次元の仮想空間で物理シミュレーション環境で動かすことができる。仮想空間では、モデルを放り投げたり、押しつぶしたりといった操作がマウスで行え、実世界のブロック玩具遊びに近い感覚を得られる。Modulobeで作成されたモデルを共有するWebサイトが運営されており、多数のモデルが共有されている。本研究との関連は、Modulobeで扱われているコンテンツが、動きを見たり触ったりすることのできるエンタテインメント性を持ったインタラクティブなコンテンツであるという点と、それを共有する環境が用意されているという点である。
Modulobeで作成するモデルは、単純な棒状の基本オブジェクトを連結させるだけで構築されており、基本オブジェクト自体は1種類しか用意されておらず、色を付けたり、変形させたりすることはできない。また、オブジェクトごとに指定する動きも、周期的なものしか指定できない。これらの制約にもかかわらず、発想次第で非常に多様なモデルを表現することができる。Modulobeでは前述のような単純な部品しか用意されていないため、初心者は呆気に取られてしまうが、共有サイトで他者が作成したコンテンツを得ることにより、自分が思いつかなかったテクニックや発想を学習し自身の創作に反映するということが、楽しみ方の一つとしてシステムに盛り込まれているように見受けられる。Modulobeはこのように、コンテンツ制作という行為自体を楽しむための設計になっており、本研究でのRAAのように、コンテンツが何かの目的のために利用されるわけではない。本研究においても、コンテンツ制作のエンタテインメント性という点において、このModulobeの設計は参考になる。
1.3.4 Rolly
研究としてではないが、ビヘイビアコンテンツの一種といえるデータの作成と共有が消費者同士の間で行われている例として、Rollyを紹介しておく。Rollyは、2007年にソニー社が発売した音楽再生機器である。Rollyの筐体は卵形をしており、内蔵のスピーカから音楽を再生する。最大の特徴としては、再生している音楽のリズムに合わせてRolly自体が踊るように転がるという点である。この踊り(モーション)は音楽に合わせて自動的に生成される他、ユーザが専用のソフトウェアを用いて制作することができる。ユーザが制作したモーションは、専用の共有サイトが用意されている。
Rolly筐体の構造上、モーションの表現の自由度は決して高くはないが、音楽を題材にしているため、必然的に音楽に合わせたモーションを制作することになり、創作の難易度は低い。共有サイトでは、アップロードされているモーションの他に、モーションに関連付けられた楽曲ファイルを有料でダウンロードすることができ、またその売り上げの一部を、モーションの制作者に支払う仕組みが用意されている。これにより、モーションの共有は楽曲の販売促進にもなっており、コンテンツ制作のモチベーションとしても還元されている。このようなコンテンツ共有の運用手法は参考になる。
2 まとめと今後の課題
2.1 本論文のまとめ
本論文の目的は、RAAに効果的なコミュニケーションロボットを開発することである。その目的のために、われわれはRAAの歴史と現状を踏まえ、RAA向けのテディベア型コミュニケーションロボットの試作を行った。また、認知症高齢者を対象にしてRAAの予備実験を行ったところ、身体的な症状の改善が確認された。
RAAに用いるコミュニケーションロボットにとって、適切なビヘイビアを設計することは重要な問題である。本章では、RAAとビヘイビアの関係について考察した上で、ビヘイビアを容易に設計するためのビヘイビアエディタの開発を行った。またわれわれは、コミュニケーションロボットにおけるビヘイビアに、映像や音楽などの作品のような繊細な表現力を見出し、ビヘイビアをコンテンツとする手法について述べた。ビヘイビアコンテンツは既存のコンテンツとは異なり、ロボットというメディアを通すことで身体性を持つという特徴がある。つまりビヘイビアは、擬人化された生き物を模した、実体のあるロボットが演じるものであり、コンピュータのディスプレイ上で表示されるだけのアニメーションとは違い、実際に肌に感じられる生々しさを持っている。われわれはビヘイビアコンテンツはそのような身体性という独特の表現力を持ったコンテンツであり、既存のコンテンツにはない面白みがあると考えている。
また、コンテンツを作成する手法として、複数の作成者が協調的な作業によってコンテンツを作成する、いわゆるコラボレーションに注目した。一般的なコンテンツの作成手法とコラボレーションの関係を考察した上で、コラボレーションにおける重要な効果として、「作業効率の改善」「コンテンツの協調的な作り込み」「アイディアや知識の補完」という3つの効果に着目した。そしてビヘイビアコンテンツを作成する際に、作成者同士でそれを共有することによりこれらの効果が得られ、より効率的に、より優れたビヘイビア設計を行うことができるという仮説を立てた。この仮説に基づき、共有と再利用によってビヘイビアコンテンツを作成する手法について提案し、実装を行った。
われわれの提案手法においてこれらの仮説が成立していることを検証するために、被験者実験を行った。実験では、8名の被験者を、ビヘイビアコンテンツの共有と再利用を行うグループと、行わないグループに分け、被験者にビヘイビアコンテンツを作成させた。作成されたビヘイビアコンテンツの定量的評価およびアンケートの結果から考察したところ、仮説が成立していることを確認できた。
2.2 今後の課題
以下に、本論文における今後の課題について述べる。
【ロボットを用いた評価実験】第章では、共有と再利用によってビヘイビアコンテンツを作成する実験を行った。この実験では、ビヘイビアコンテンツの質を表す指標として、アクションに含まれる要素の数を用いた。しかし、ビヘイビアコンテンツの質とは、本質的には、RAAに効果的かどうかであり、実際にRAAを行わなければ測ることはできない。よって、共有と再利用によって作成されたビヘイビアがRAAにとって効果的かどうかを評価するために、評価実験を行う必要がある。
ただし、本研究では、RAAでの運用とビヘイビアの改良を繰り返し行っていくことが重要であるということを議論した。本論文における実験で作成されたビヘイビアをRAAで試したとき、たとえ良い結果が得られなくても、その結果を反映させて改良していくことが重要である。ビヘイビアの改良には提案手法は有効であり、共有をせずに改良していく場合よりも効率的であることが期待できる。
【個人への適応】本研究で提案した手法では、ビヘイビアサーバには1つのビヘイビア空間しかなく、コラボレーションによって1つのビヘイビア集合を作成する。第章で行ったRAAの予備実験では、認知症高齢者の被験者は、ペットを飼っていたときの経験を思い出し、ロボットの存在およびふるまいに対してストーリ性を見出していた。このように、ユーザの背景や嗜好は多様であるため、ユーザの嗜好に応じてビヘイビア集合を作成することはRAAにとって有用であると考えられる。このためのアプローチとしては、ビヘイビア単体だけでなく、ビヘイビアの集合をコンテンツとして扱う仕組みが考えられる。このようなコンテンツを、ビヘイビアリストと呼ぶことにする。
さらに共有されたビヘイビアリストを用いて、より効果的に個人適応させるには、ユーザの状況や嗜好のモデル化を行い、その嗜好に応じてビヘイビアリストを推薦する仕組みが有効であるだろう。このような推薦の仕組みには、既存のコンテンツ技術を応用することで実現できるだろう。たとえば梶らは、音楽のプレイリストにおいて、状況や嗜好に応じた推薦を行う仕組みを研究開発している。
【ビヘイビア同士の調和】本研究では、ロボットの局所的なふるまいをビヘイビアとし、ユーザが作成できる仕組みを実装した。しかし本研究におけるビヘイビアは局所的なふるまいであり、ロボットに組み込む際には、ビヘイビア集合の全体的な調和に注意しなければならない。ビヘイビア集合の中で、他のビヘイビアと明らかに趣の異なるものや、ビヘイビア同士で意味的な矛盾が起こっているものなどは、ロボットのユーザに対して違和感を与える可能性がある。しかし本論文では、このようなビヘイビア同士を調和させる手法を提案するまでには至らなかった。
ビヘイビア同士の調和は、機械的に行うのは困難である。ロボットに組み込んでのトライアンドエラーを簡単に行える仕組みがあれば、確認作業が容易になるだろう。また、梶らの、プレイリスト共有のように、調和が確認されたビヘイビア集合をコンテンツとして共有する仕組みも有効であるだろう。
【共有における合意形成】提案手法では複数のユーザがコラボレーションによってビヘイビアを設計するが、その際、ユーザ同士がそれぞれ異なる方針のもとにビヘイビアコンテンツを作成していくと、最終的には調和の取れていないビヘイビア集合になる可能性がある。このような事態を回避するために、システムの上でユーザ同士での合意形成が行えることが求められるだろう。
たとえば、リアルタイムのコラボレーションによって4コマ漫画を作成するAB-DOKANでは、チャット機能を用いて、コンテンツを作成しながらリアルタイムに議論できるようになっている。また、Wikipediaでは、項目ごとに用意されている「ノート」と呼ばれる掲示板機能で、項目の編集方針がユーザの間で議論できるようになっている。
【ビヘイビアの自然な入れ替え】ユーザはロボットに対して親和的な感情を抱いているとする。そのような状況において、もしロボットのビヘイビアが突然、すべて新しい別のものに置き換えられたらどうなるだろうか。新しいビヘイビアは、それまでロボットに組み込まれていたビヘイビアとは趣の異なるもの(口調や性格が大きく異なるなど)であった場合、ユーザはロボットに対してどのような感情を抱くだろうか。ユーザはビヘイビアの変更が起こった前と後のロボットの人格は、同一なものであると感じるのだろうか。それとも、別の人格になってしまったと感じるのだろうか。ビヘイビアの変更行為は、ユーザから見たロボットの人格の同一性に関わる問題であり、ビヘイビアの質の問題とは独立に存在している重要な視点である。ビヘイビアを改善しつつロボットを運用し、さらにユーザに親和的な感情を継続して抱かせていくためには、いかにビヘイビアを自然に入れ替えるかが重要になるだろう。
入れ替えが自然かどうかを機械的に判断するには、ビヘイビアコンテンツの意味内容を機械が処理できる必要がある。このような理想にはまだ及ばないが、第章では、ビヘイビアコンテンツにおける意味内容の判別についてのアプローチの一つを述べている。
謝辞
本論文の執筆にあたっては、指導教官である長尾 確 教授のご指導をはじめ、多数の方々のご協力をいただきました。ここに、心より感謝の意を表します。
名古屋大学 長尾 確 教授には、本研究の方向性についての指針や、学会発表や論文執筆におけるアドバイスなど、本研究におけるあらゆる事柄について事細かなご指導を賜りました。それだけでなく、研究に対する取り組み方や、議論の技術、物事の柔軟な考え方に至るまで、研究の上で大切な事柄をご教授いただきました。なお本研究は、(株)富士通研究所との共同研究の一部としておこなわれました。本研究で使用したロボットは、同研究所の渡辺 一郎 様を中心として開発をおこなっています。同氏には、開発中のロボット筐体を提供していただいたほか、ロボット研究に関連していくつかの企業や機関を紹介してくださり、研究者として、また社会人としての知見を広げることができました。また、様々な場面で個人的な相談事にも乗ってくださいました。
同研究所には、夏季のインターンシップ生として招いていただきました。インターンシップの際には、渡辺様をはじめ、同研究所 インテリジェント・ストレージシステム研究所 自律システム研究部の方々にお世話になりました。
上智大学 黒川 由紀子 教授 および、北山 純 先生には、心理学の知見に基づいた貴重なご意見をいただきました。黒川研究室の皆様には、ロボットセラピーについての調査に協力していただき、また、ロボット開発についての議論に参加していただきました。
青梅慶友病院 松澤 広和 先生には、ロボットを用いた臨床実験に協力していただきました。同病院において実験に参加していただいた方々には厚くお礼申し上げます。
そして、日頃の研究活動を円滑に進めてこられたのは、名古屋大学 長尾研究室の皆様によるバックアップのおかげです。大平 茂輝 助教には、研究室全体のゼミを通して数多くの有益なご意見をいただきました。伊藤 周さんには、ロボットのハードウェアについての技術的なサポートを中心に、本研究に対して積極的なご協力をいただきました。また先輩方をはじめ、研究室の皆様には、研究室での生活において助言をいただいたり、ゼミにおいてアイディアを提供していただいたりなど、あらゆる場面で研究活動を助けていただきました。また、研究室の皆様は多忙な中、実験にも積極的に協力してくださいました。
最後に、本研究を論文の形にまとめることができたのは、このような方々のご支援のおかげです。ここに、改めて心からお礼申し上げます。