
複数移動体の安全走行のための移動体間の連携・協調
概要
筆者が所属する研究室では、個人用知的移動体AT(Attentive Townvehicle)と呼ばれる自動走行可能な個人用の乗り物の研究・開発を行っている。ATは、搭乗者や自身を取り巻く環境に適応することで搭乗者を支援するものである。また、その他の移動体として、無人で自律的に走行するものもある。複数の移動体が存在する環境下で重要となるのは、衝突することなく安全に、かつスムーズに走行できることである。
そこで本研究では、移動体間で協調的な行動をとることにより、複数の移動体が安全に走行できる仕組みを提案する。これは、現在地や目的地などの情報を移動体間で動的に共有することにより実現する。
1 はじめに
近年、自動車より小型の1人用の移動機械であるパーソナルモビリティの開発・研究が盛んである。筆者が所属する研究室においても、個人用知的移動体AT(Attentive Townvehicle)と呼ばれる、自動走行可能な個人用の乗り物の研究・開発を行っている [1]。また、AT と同様に自律走行可能な無人移動体(MUV : Middle-sized Unmanned Vehicle)の研究・開発も行っている。これらの移動体は、搭乗者や移動体自身を取り巻く環境に適応することで、移動体の搭乗者を支援するものである。
将来的には、これらの知的な移動体が複数台、同時に稼働している環境が実現される可能性は高いと考えられる。ここで重要となるのは、自由に移動する複数の移動体同士が衝突せず、安全に走行できることである。そこで本研究では、このような安全な走行を実現するため、移動体間において連携的、または協調的な行動をとるための手法を提案する。本研究は、環境中の全移動体が安全に走行できることを目標とするため、個人の技能に大きく影響される 搭乗者の操縦による走行ではなく、移動体の自動走行を前提とする。自動走行の場合、各移動体の目的地までの走行経路は一意に定まり、移動体間で共有でき る。この走行経路は、後述する手法によって動的に変更されることもある。
また、研究対象である移動体は現在、屋内でのみ自動走行が可能であるため、本研究が想定する環境は屋内に限定し、屋内であるため左側通行という概念や信号機の存在もないものとする。さらに問題を単純化するため、2台の移動体間の連携・協調のみを考慮する。
2 個人用知的移動体と無人移動体
AT は情報処理・通信機能を持ち、情報処理機能と人間の生活における移動を連動させることにより、人間の活動を支援する移動体である(図[atmuv]右・中)その機能の一つとして、搭乗者が指定した目的地まで自動的に走行する機能がある。
AT には、前後に一つずつレーザーレンジセンサーが搭載されており、レーザーレンジセンサーは周囲の障害物までの距離を取得することが可能である。自動走行は、レーザーレンジセンサーが取得した情報と、あらかじめ生成した周囲の地図の情報を利用することにより実現される。また、MUV (図[atmuv]左)は AT と同様の仕組みで自律走行を可能としている。
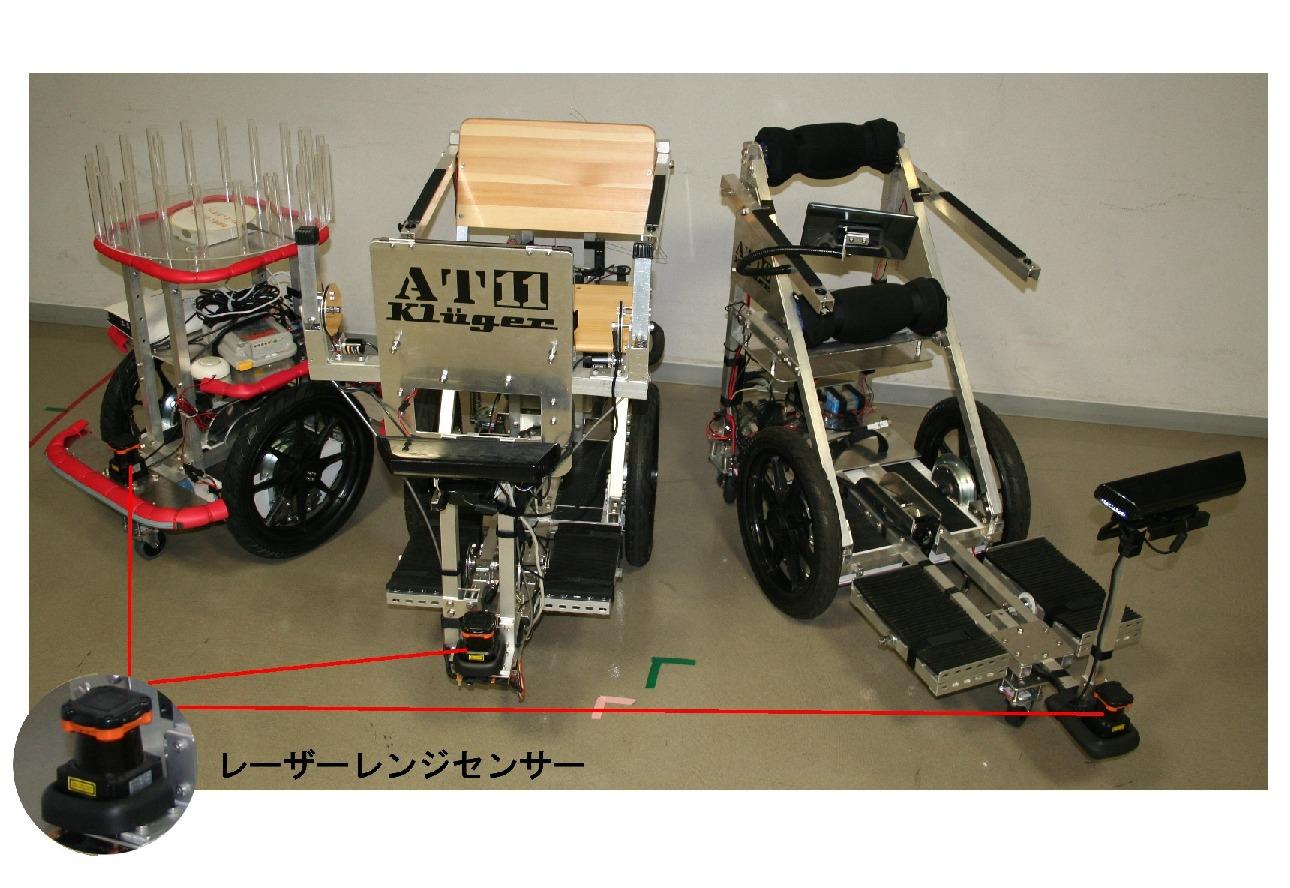
図1: AT10号機(右)、AT11号機(中)、MUV(左)
3 移動体間の連携・協調
本研究では、連携的な行動として追従走行、協調的な行動として、道を譲るという行為を伴う十字路における走行を取り扱う。
まず、追従走行について説明する。複数の移動体の走行経路の時間と場所に重複がある場合、つまり一つの経路を複数の移動体がほぼ同時に走行しなければならない場合、先に経路を通る移動体、後に経路を通る移動体と いう順序が必要になり、追従走行をする必要がある。一般的に自転車の横並びでの走行が危険であると言われているように、移動体においても横並びでの走行は 避けた方が良いと考えられるため、前後に並ぶ追従走行を行う。前後の移動体はそれぞれの存在を認識しているため、前を走行する移動体が後ろを走行する移動体に自分が取得した情報を送信し、後ろの移動体はそれを基に走行することにより、安全に走行しやすくなると考えられる。たとえば、移動体間の距離が短すぎると衝突事故の原因となり、長すぎると両者の間に他の移動障害物が侵入して事故を引き起こす原因となると考えられるため、移動体間の距離を調整しつつ走行する。
前後の移動体が共有する情報としては、前を走行する移動体(マスターと呼ぶ)の走行経路がある。これを基に後ろの移動体(スレーブと呼ぶ)が走行する。具体的には スレーブは、スレーブの現在地から最短距離にあるマスターの経路の一点までの経路に、その一点からのマスターの経路を加えた経路を走行する。また、移動体間の距離の調整は、スレーブが速度を調節することにより実現する。追従走行時におけるそれぞれの移動体の地図の表示は図[tsui] のようになる。図[tsui] において「master」や「slave」の表示がない移動体が自分であり、自分から各図の右上に伸びている太線が走行経路である。
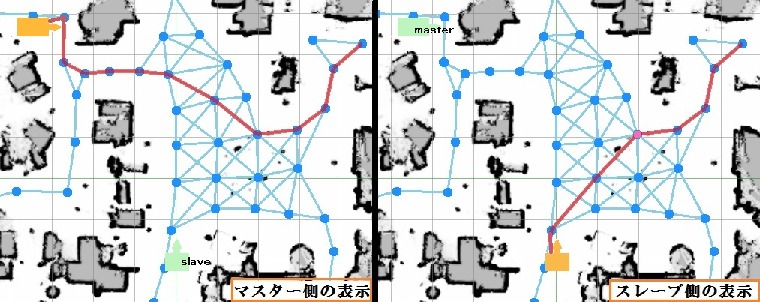
図2: 追従走行時における地図の表示(左:マスター 右:スレーブ)
次に、道を譲るという行為を伴う十字路における走行について説明する。交差点が日本の道路形状別死亡事故発生件数の全体の約半数を占めている [http://www8.cao.go.jp/koutu/taisaku/h24kou_haku/pdf/zenbun/gen1_1_1_02.pdf] ことを考慮し、特に十字路に着目し、十字路において一方の移動体が他方に道を譲るという問題を取り扱う。十字路は交差点の中でもいくつかの特徴を有している。たとえば、死角となる曲がり角が多いこと、複数方向の交通が多く重なること等がある。また、信号機がないという制約下で安全に走行するため、道を譲るという行為が重要となる。
以上のような走行を実現するための手法を簡単に説明する。走行開始前に2台の移動体が設定した走行経路、それぞれの移動体の交差点への進入予想時刻・速度から、2台に対して優先順位を設定し、その順位に基づいて2台の速度調節や経路変更を行う。2台の経路が交差する時や、図[cross] に示す走行経路のように、一方の移動体に向かっていくような走行をしない時は、速度調節をするだけで2台のすれ違いを行うことができる。一方、交差点内でお互いが向き合って走行することが予想されるような時は、速度調節をしても衝突してしまうため、衝突しないように経路を変更することで、すれ違いをスムーズに行うことができる。
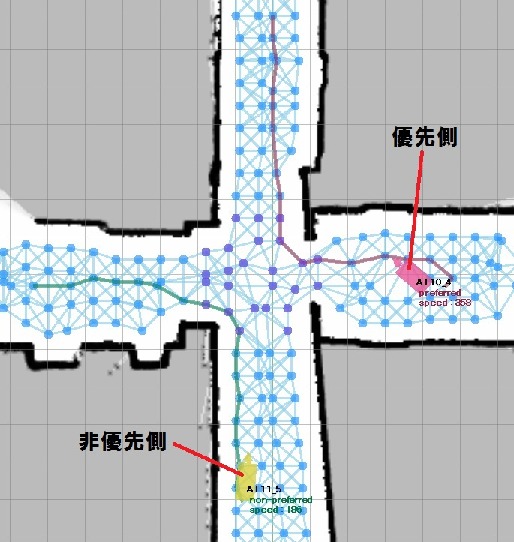
図3: 十字路における走行時の表示
以上のような行動において重要となるのは、情報の共有である。そこで本研究においては、移動体の位置や走行速度、走行経路等の情報を一括して管理することのできる位置情報サーバーを開発し、移動体間において情報を共有する手法をとる。位置情報サーバーは、追従走行では経路情報の共有を支援し、十字路における走行では経路情報の共有の他に、複数の移動体の経路変更や速度制御も行う。
4 おわりに
本研究では、複数の知的な移動体が稼働する環境下で、移動体が衝突することなく安全に走行するために、移動体間において協調的、または連携的な行動をとるための手法を提案し、実現した。しかし、本研究では特に安全性を重視したため、結果的に移動の効率性を軽視することになった。実用性を考慮すると、安全性と効率性のバランスがとれていることが望ましいと考えられる。したがって、移動に対する効率が向上するような手法を考えていくことが今後の課題である。また、本研究では2台の移動体が稼働する環境であったが、さらに台数が増えた場合に関して、シミュレータなどを使って詳細に分析する予定である。
さらに、本研究では、位置情報サーバーを用いて移動体を制御する手法をとっているが、サーバーの故障により事故が起きることが考えられる。したがって、位置情報サーバーにトラブルがあった場合は、交差点においても移動体が自律的に対応できる手法[2]を考える必要がある。