
小型無人移動体との連携による個人用知的移動体の安全自動走行とその評価
概要
我々の研究室では,個人用知的移動体 AT(AttentiveTownvehicle)と呼ばれる,搭乗者の行きたい場所まで自動で移動する個人用の乗り物の研究・開発を行っている.自動走行する移動体の問題の1つは搭乗者の安全性である.本研究では,自律走行可能な小型無人移動体(Small Unmanned Vehicle)を AT の拡張センサとして用いることでこの問題を解決した.具体的には,AT が走行する経路上で,死角などがあり特に走行に注意するべき場所を自動で検出し,その場所に小型無人移動体が自律的に移動し,AT の代わりに周囲の状況をセンシングすることで,AT の安全自動走行を実機を用いて実現した.さらに,大規模な実験による評価のためにシミュレータを作成し,提案手法がATの安全性を向上させるのに効果的であることを確認した.
1 はじめに
我々の研究室では、個人用知的移動体AT (Attentive Townvehicle)と呼ばれる、搭乗者の行きたい場所まで自動で移動する個人用の乗り物の研究・開発を行っている(図1右)。自動走行する移動体の最大の課題は移動体が歩行者などの移動障害物に衝突することなく安全に目的地まで到着することである。衝突回避をしながら、自動走行をする移動体の研究は多くあるが、移動体の死角から接近する移動障害物との衝突を回避することは従来の提案手法では非常に困難であった。特に安全性が求められる自動走行可能な乗り物にとって、この問題を解決することは必要不可欠である。
この問題に対して、見通しの悪い交差点などに移動障害物の接近を感知して表示するデバイスを設置する研究[1]などが行われてきたが、環境に網羅的にデバイスを設置することは難しいという問題である。そこで本研究では、自律走行可能な小型無人移動体(SUV: Small Unmanned Vehicle)をATの拡張センサーとして用いることでこの問題を解決する手法を考案し、実機を用いて実現した[2]。SUVは目的地まで自動的に移動する機能を持つ移動体である(図1左)。 また、ATとSUVにはレンジセンサーと呼ばれる、平面上にセンサーから障害物までの距離を計測するセンサーが搭載されており、このセンサーを用いて移動障害物を検出する。

図1: AT(右)とSUV(左)
2 注意区間の検出
注意区間とは、ある経路上を走行する際に、進行方向前方の視野外から接近する移動障害物と衝突する可能性が高く、それを回避するために特に注意を払う必要がある、経路上の区間を指す。本研究では、環境中の壁などの障害物の位置関係情報を表す地図とその地図での経路が与えられた場合の注意区間を検出する方法を実現した。実際に検出した結果の例を図2に示す。注意区間の検出方法は、経路上の初めてセンシングできる領域が急増する区間を発見するものである。この注意区間を用いたATの安全自動走行の仕組みを次章で説明する。
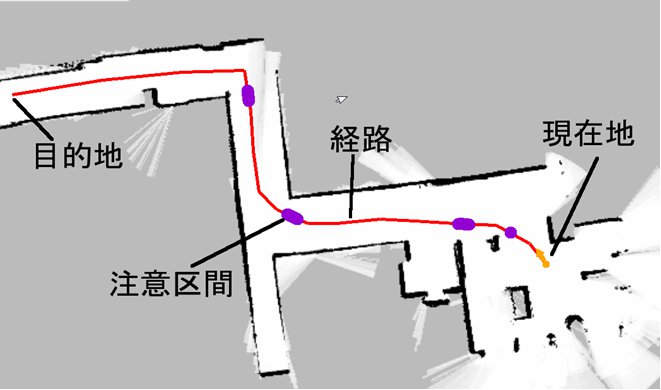
図2: 地図と経路によって検出された注意区間
3 連携走行による安全走行
ATの搭乗者が目的地を入力すると、ATは目的地までの経路を生成し、その経路をSUVに送信する。その後、ATとSUVは同時に同経路を走行開始する。SUVはATよりも速い速度で自動走行を行い、注意区間付近で速度を落とし、移動障害物の出現に備える。さらに注意区間の終点に着くと完全に停止し、ATが一定距離に近づくまでATの死角から接近する移動障害物がないか監視し続ける。移動障害物が現れたときは、SUVは移動障害物と衝突しない位置に移動し、移動障害物が通り過ぎるのを待つ。移動障害物を認識した時点でATにその情報を伝達する。移動障害物が現れないときはATの接近に伴ってSUVは次の注意区間まで移動を再開する。
SUVのセンシング情報はその走行中は常に送信され、ATはSUVのセンシング情報を自分のセンサーと同じように処理することができる。図3の右側はATのタッチパネルディスプレイから見ることができる画面である。SUVの取得したセンサーが反映されているのが分かる。
移動障害物同士の衝突の多くは、両者が相手を認識することなく接近し、避けられない距離になるまで移動し続けた場合に発生する。SUVを用いたこの仕組みは、移動障害物の認識を早め、その障害物との衝突の危険性が十分に低くなるまで停止する仕組みであり、移動の安全性を大幅に向上させることができると考えられる。
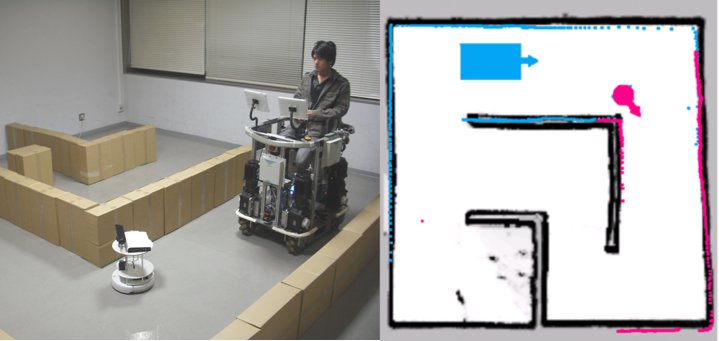
図3: 注意区間で停止するSUVとその時のATのコンソール画面
4 シミュレーションによる実験と評価
前章までで説明した仕組みによって、ATの自動走行の安全性がどの程度向上したのかを評価するために、シミュレータを作成し、そこで大規模な実験を行った。作成したシミュレータ内の実験環境について簡単に説明する。
・120m×100m程度の大きさの屋内の環境
・環境中に存在する移動障害物(人間)は100人
・ATと移動障害物はランダムで目的地を決め、その目的地までの最短経路を移動する行動を繰り返す
・ATとSUVが連携走行する場合のSUVの動作は、前章で説明した動作と同じ
・ATの速度は0.8m/sec、移動障害物の速度は1.2m/sec
・移動体同士が衝突した場合、移動体は衝突の影響を受けずにすり抜けて移動を続ける
・ATとSUVには実機と同じ位置に擬似的なレンジセンサーを搭載し、レーザーが移動障害物に衝突した場合にその移動障害物を認識する
・SUVが認識した移動障害物はATも認識したものとする
以上の条件で、SUVと連携走行する場合とそうでない場合の二通りを実験した。上記の説明の通り、AT・SUV・移動障害物は、お互いを認識しても回避行動を一切行わず、衝突しても影響を受けない。しかし、認識から衝突までの時間が比較的長い(例えば3秒)場合は、実際には回避行動を行う時間的余裕があるため、危険な状況であるとは言えない。逆に認識から衝突までの時間が短いほど、実際の危険な状況である。そこで、本研究では認識してから回避行動をとらない場合の衝突までの時間を衝突時間と呼び、この時間の分布を評価する。シミュレーションの終了条件は回避行動をとらない場合の衝突が3000回起こった場合とした。
実験結果を図4に示す。図に示す二つのグラフは、SUVと連携走行なし/ありの場合のATの衝突時間のヒストグラムである。二つのグラフの形状は似ており、SUV連携走行時のグラフが右にずれている。また、衝突時間の平均はSUVがない場合は4.92秒、ある場合は8.29秒であった。衝突時間が3秒以内だった件数は、SUVなしの場合は3000件中672件(22.4%)に対し、SUVある場合は3000件中4件(0.1%)にまで下がった。以上のことから、SUVと連携走行することによって、ATの移動障害物の認識が早まり、衝突時間が長くなったことが分かる。前述の通り、衝突時間が長くなることは危険な状況が少なったと言えるため、提案手法によってATの安全性が向上したと言える。

図4: 実験結果
5 おわりに
本研究では、ATをいかに安全に自動走行させるか、という問題に対してSUVを前方に走行させ、障害物を探索させるという仕組みを提案し、実機を用いて実現した。また、この手法による安全性の向上をシミュレータを用いて確認した。しかし、シミュレータではSUVによって人の認識を早めることを検証したが、回避行動を含めた評価はまだ行っていない。安定した回避行動の仕組みを実現し、シミュレータによって検証することは今後の課題の一つである。