
小型無人移動体との連携による個人用知的移動体の安全自動走行に関する研究
概要
我々の研究室では、個人用知的移動体AT(AttentiveTownvehicle)と呼ばれる、搭乗者の行きたい場所まで自動で移動する個人用の乗り物の研究・開発を行っている。自動走行する移動体の問題の一つは搭乗者の安全性を可能な限り高めることである。この問題に対して移動体自身が持つセンサーでは十分に対処できないため、いかに環境側に周囲の情報を収集し伝達する仕組みを実現するか、ということが重要となる。そこで本研究では、自律走行可能な小型無人移動体(Small Unmanned Vehicle)をATの拡張センサーとして用いることで、この問題を解決を試みた。具体的には、ATが走行する経路上で、死角等があり特に走行に注意するべき場所を自動で検出し、その場所に小型無人移動体が自律的に移動し、ATの代わりに周囲の状況をセンシングし、検出した移動障害物の情報をATに伝達することで、ATの安全自動走行を実現した。提案手法のために、大きく分けて以下の5つの要素技術を実現し、それぞれについての精度の評価を行った。
・環境地図生成 移動体が環境を認識するための地図(環境地図)を作成する手法
・自己位置推定 移動体が環境地図上で自身の位置と向きを推定する手法
・自動走行制御 移動体が目的地への経路を生成し、走行するための制御手法
・移動障害物検出 センシング領域内の移動障害物を検出する手法
・注意区間検出 SUVがATの経路上の注意するべき区間を検出する手法
さらに、提案手法を大規模な実験によって評価するためにシミュレータを作成した。このシミュレータでは、仮想の環境・移動障害物・AT・SUVをシミュレータ内に作成し、実環境での現象とほぼ同等の現象を長時間シミュレーションすることが可能である。このシミュレータを用いて、以下の3つの仮説を検証するための実験をそれぞれ行った。
・仮説1 ATはSUVと連携走行することにより、移動障害物の認識が早まり、危険な状況(移動障害物と衝突しそうな状況)を回避することができる
・仮説2 移動障害物と衝突しそうな状況は注意区間付近で起こりやすい
・仮説3 ATはSUVと連携走行することにより、安全かつ効率的に移動できる
仮説1については、実験によって、SUVと連携走行することによりATの移動障害物の認識が平均で3.3秒で早まることが分かり、仮説2については、移動障害物と衝突しそうな状況は平均して91.0% が注意区間で発生することが分かった。また、仮説3については、ATとSUVの自動走行の速度が0.5m/secから1.4m/secまでのどの速度でも安全で効率的(平均速度が障害物を考慮しない場合とほぼ同等)に走行できることが分かった。
1 はじめに
我々の研究室では、個人用知的移動体AT(AttentiveTownvehicle)と呼ばれる、搭乗者の行きたい場所まで自動で移動する個人用の乗り物の研究・開発を行っている。自動走行する移動体の問題の一つは搭乗者の安全性である。この問題に対して移動体自身が持つセンサーでは十分に対処できないため、いかに環境側に周囲の情報を収集し伝達する仕組みを実現するか、ということが重要となる。そこで本研究では、自律走行可能な小型無人移動体(Small Unmanned Vehicle)をATの拡張センサーとして用いることでこの問題を解決した。具体的には、ATが走行する経路上で、死角等があり特に走行に注意するべき場所を自動で検出し、その場所に小型無人移動体が自律的に移動し、ATの代わりに周囲の状況をセンシングすることで、ATの安全自動走行を実現した。提案手法は、大きく分けて以下の4つの要素技術によって構成される。
・環境地図生成 移動体が環境を認識するための地図を作成する手法
・自己位置推定 移動体が環境地図上で自身の位置と向きを推定する手
・自動走行制御 移動体が目的地に対する経路を走行するための制御手法
・注意区間検出 SUVがATの経路上の注意するべき区間を検出する手法本研究ではこの4つの要素技術を実現し、さらに、各要素技術に関して精度の評価を行い、提案手法が十分に妥当であることを示した。
さらに、提案手法を大規模な実験によって評価のためにシミュレータを作成した。このシミュレータでは、仮想の環境・移動障害物・AT・SUVをシミュレータ内に作成し、実世界の様子を長時間シミュレーションすることが可能である。このシミュレータを用いて、以下の3つの仮説を検証するための実験をそれぞれ行った。
・ATはSUVと連携走行することにより、移動障害物の認識が早まり、危険な状況(移動障害物と衝突しそうな状況)を回避することができる
・移動障害物と衝突しそうな状況は注意区間付近で起こりやすい
・ATはSUVと連携走行することにより、安全かつ効率的に移動できる仮説1については、実験によって、SUVと連携走行することによりATの移動障害物の認識が平均で3.3秒で早まることが分かり、2については、移動障害物と衝突しそうな状況は平均して91.0\% が注意区間で発生することが分かった。また、3については、ATとSUVの自動走行の速度が0.5m/secから1.4m/secまでのどの速度でも安全で効率的(平均速度が障害物を考慮しない場合とほぼ同等)に走行できることが分かった。
1.1 パーソナルモビリティと自動走行
近年、セグウェイ社の「セグウェイ」、ホンダの「U3-X」など、一人乗りの移動機械(パーソナルモビリティ)についての研究・開発が活発に行われている。パーソナルモビリティは情報技術で制御することで、より快適で安全に移動でき、乗り降りも簡単で、屋内および屋外をシームレスに走ることができる乗り物である。また、高齢者や体に何らかのハンディキャップを持った人でも簡単に操作することが可能で、近い将来の、個人の移動手段の一つとして不可欠なツールになることが予想されている。パーソナルモビリティが役に立つ場面として例えば、観光地でいくつもの名所を巡るような場合に、気軽に乗り込んで便利に移動できるツールがあれば、行動範囲が広がり、より快適な観光をすることができる。他にも、大型のショッピングモールやアミューズメントパークなど大きな施設内の移動で不必要に体力を消耗することがなくなる。今のところ日本では、パーソナルモビリティが歩道を走ることは法律で禁止されているが、アメリカやヨーロッパの各国ではすでに認められている。法律が変われば次第にパーソナルモビリティが普及し、人はより便利な移動手段を手にするだろう。便利な次世代の乗り物として研究されているパーソナルモビリティであるが、さらにトヨタの「i-unit」や、ゼネラルモーターズの「EN-V」など搭乗者の行きたい場所まで自動で走行するパーソナルモビリティについての研究も盛んである。また、Google社は自動車の運転を自動化する自動運転カープロジェクトを推進しており、すでに運用段階まで研究が進んでいる[http://www.itmedia.co.jp/news/articles/1209/26/news064.html]。2012年8月には48万kmを無事故で走破し、ネバダ州とカリフォルニア州では公道での運転が許可された。自動走行する乗り物が今後普及することにより、人為的な事故を無くすことができるだけでなく、効率の良い走行による低燃費化や、障害者のハンディキャップを無くすなど様々な利益が得られると思われる。そのため、今後も研究・開発が活発に行われることが予想される。我々の研究室でも、自動走行するパーソナルモビリティであるAT (Attentive Townvehicle) と呼ばれる移動体の研究を行っている(図1.1)。ATは、自動走行するだけでなく、タッチパネル式のコンソールを介して搭乗者からの入力を受け付け、搭乗者に情報を提示したりできる移動体である。乗り物を情報端末化することで、我々にとって最も基本的であり、日常生活の大部分で行っている「移動」という行動と情報内容を連携させ、人間と情報世界との新たな関係を見出すのが本研究を含む研究全体の大きな目標である。例えば、AT に乗って体験した記録をAT のセンサー情報とともに記録し、それをソーシャルサービスで共有することにより他のユーザーがある人の体験を閲覧・引用し、それをAT を使って追体験できるような研究[1]や、美術館において、搭乗者の閲覧したい作品までの自動走行と、その作品に関する情報提示を行うことでより豊かな鑑賞体験を可能にする研究[2]などが行われてきた。このように我々は、移動と情報提供を同時に行える乗り物でしか実現できないようなサービスを新しく提案し、その仕組みを開発してきた。こうした自動走行するパーソナルモビリティには、進行方向に突然現れる移動障害物などを回避し、目的地まで安全に走行する機能が必要不可欠である。安全に自動走行するために解決すべき問題について次の節で説明する。
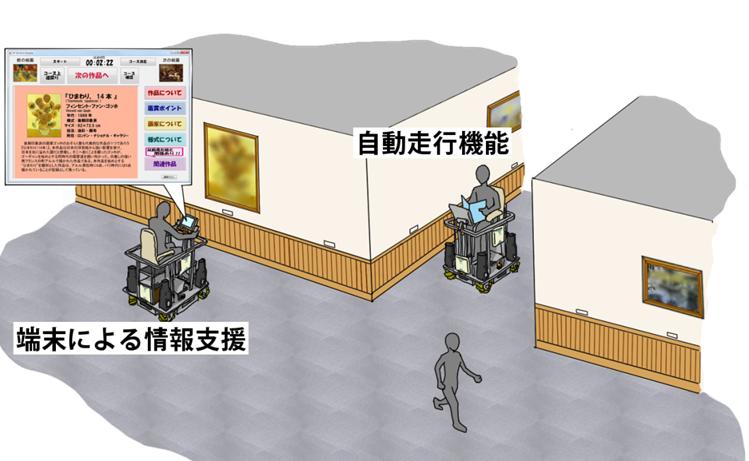
図1.1: 個人用知的移動体AT
1.2 自動走行の安全性
移動体の自動走行に関する最大の課題は、その移動体が歩行者などの移動障害物に接触・衝突することなく安全に目的地まで到着することである。障害物回避をしながら、自動走行をする移動体に関しては多くの研究が行われているが、そのほとんどは次のようなプロセスに沿って行われている[3][4]paper-13200][5][6]。(1)移動障害物を認識して、その移動経路を予測し、自身との衝突の可能性を評価する。(2)衝突の可能性の高い移動障害物に対して回避方向を決定し、その方向に移動する。しかし、このプロセスでは、移動障害物の認識から衝突まで十分な時間がある場合、例えば正面から近づいて来る移動障害物とのすれ違いなどは解決できるが、移動体の死角から接近する移動障害物との衝突を回避することは困難である。その理由は、移動体に装備されたセンサーで移動障害物を検出してから衝突するまでの時間が非常に短いためである。特に高い安全性が求められる自動走行可能な乗り物にとって、この問題を解決することは必要不可欠である。
この問題に対して、見通しの悪い交差点などに移動障害物の接近を感知して表示するデバイスを設置する手法[7]や、音情報に基づいて物陰の人物認識を行う手法[8]などが提案されてきた。前者の手法は環境に網羅的にデバイスを設置することを前提としているが、その実現にかかるコストが非常に高いと考えられる。また、後者の手法は音が入り乱れている環境での誤認識が問題となる。
次の節で、これらの問題に対する本研究のアプローチについて述べる。
1.3 小型無人移動体との連携による個人用知的移動体の安全自動走行
前節で述べた問題を解決するためには、移動体そのものの持つセンサーのみでは十分ではなく、いかに環境側に周囲の情報を収集し伝達する仕組みを実現するか、ということが重要になってくる。前節で述べたように、この問題を環境設置センサーを用いて解決することはコスト的に困難であるため、それ以外の方法を考える必要がある。本研究では、自律走行可能な小型無人移動体(SUV: Small Unmanned Vehicle)をATの拡張センサーとして用いることでこの問題を解決する手法を提案する。具体的な手順を以下で説明する。
1. ATの搭乗者が目的地を決め、ATはその目的地への経路を計算する
2.SUVはATの経路を取得し、自分の現在地からその経路に合流する経路を生成し、自動走行を開始する
3.ATはSUVの後方を一定距離以上離れて自分の経路を走行する
4.SUVは経路上で死角等があり特に走行に注意するべき場所を自動的に検出し、その場所を通るときは減速して移動する
5.SUVは逐次ATに自身のセンサーの情報とSUV自身が検出した移動障害物の情報を送る
以上の仕組みで、ATは死角から接近する移動障害物を離れた位置で検出することができ、それによってATは安全に自動走行することが可能となる(図1.2)。本研究で特に重要な技術として、上記の4に関して、経路上の注意するべき場所を「注意区間」と呼び、これを検出する仕組みを実現した。注意区間を直感的に説明すれば、自動車を運転する際に、建物などで視野が制限され危険を感じる場所を、徐行して走行する区間とほぼ同義である。本研究では、注意区間を、視認できる領域が急増する区間として、地図上で計算する手法を提案する。図1.3は経路と地図から計算された注意区間の例である。また、この手法によって正しく注意区間が検出されたかを実験によって検証した。また、上記の5に関して、SUVのセンサー情報を利用して、ATのセンシング領域を拡張する手法を実現した(図1.4 )。この手法は周辺の環境の地図を自動生成する仕組みとその地図上での姿勢(位置と向き)を推定する仕組みによって成り立っており、この技術を用いて、共通の地図の座標系でSUVとATの姿勢を表すことができる。以上が、本研究の提案手法である、ATの自動走行の安全性を向上する仕組みである。さらに、本研究ではこの手法の安全性の向上についてシミュレータで評価を行った。それについて次節で説明する。

図1.2: 絶対座標によるセンシング領域の拡張-写真 注意区間の検出例
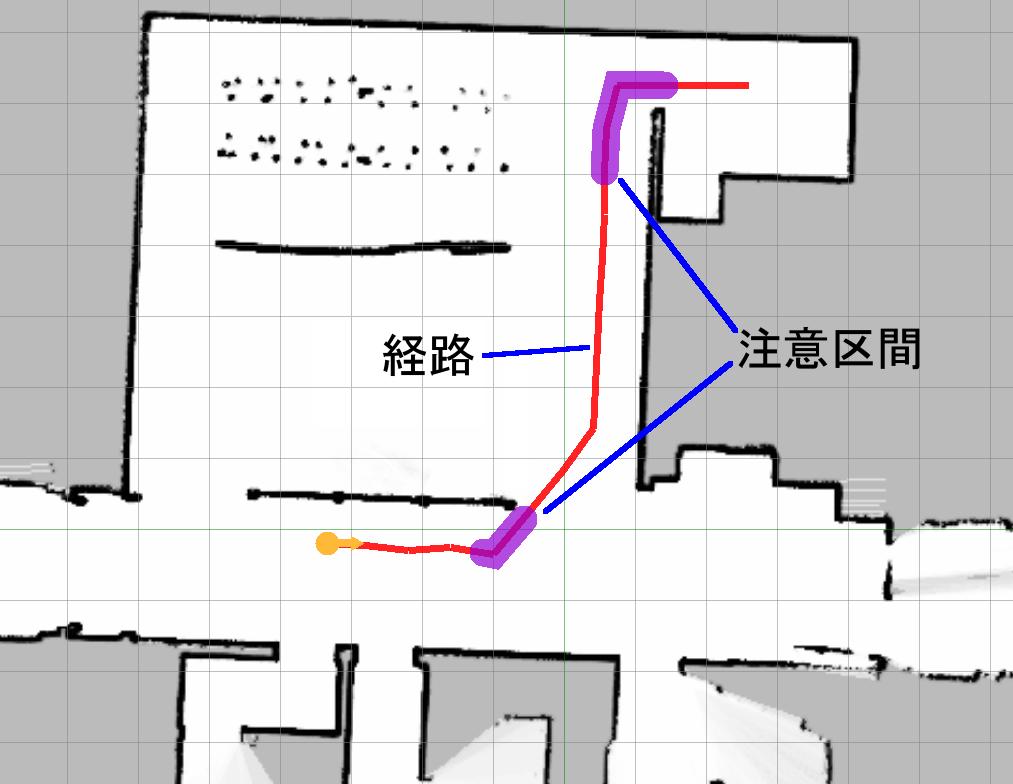
図1.3: 注意区間検出例

図1.4: 絶対座標によるセンシング領域の拡張
1.4 シミュレータによる評価実験
前節で説明した提案手法より、ATの自動走行の安全性を評価するためには、移動障害物が自由に動きまわる屋内の環境で、ATがその移動障害物と衝突することなく目的地まで到着できるかどうかを検証すればよいと考えられる。しかし、これを厳密に評価するためには、実験環境と移動障害物の数と実験回数をある程度以上に大規模にする必要があり、実環境での実験は困難である。そこで、本研究ではシミュレータによる評価実験を行った。シミュレータ上では、実際に存在する屋内の地図に基づいて、大規模な仮想環境を作成し、そこでSUVとATを長時間走らせることにより移動障害物との衝突の有無を調べた。シミュレーション中の移動障害物とATとSUVの位置と向きは全てログとして保存され、このログを分析することで、ATやSUVに危険な状況が発生した頻度などを調べることができる。図1.5は作成したシミュレータ上で危険な状況と判断された例を示している。シミュレータによる評価実験で検証した仮説は以下の3つである。
1.ATはSUVと連携走行することにより、移動障害物の認識が早まり、危険な状況(移動障害物と衝突しそうな状況)を回避することができる
2.移動障害物と衝突しそうな状況は注意区間付近で起こりやすい
3.ATはSUVと連携走行することにより、安全かつ効率的に移動できる
以上の3つの仮説を検証するために、いくつかの実験を行った。仮説1については、実験によって、SUVと連携走行することによりATの移動障害物の認識が平均で3.3秒で早まることが分かり、2については、移動障害物と衝突しそうな状況は平均して91.0% が注意区間で発生することが分かった。また、3については、ATとSUVの自動走行の速度が0.5m/secから1.4m/secまでのどの速度でも安全で効率的(平均速度が障害物を考慮しない場合とほぼ同等)に走行できることが分かった。
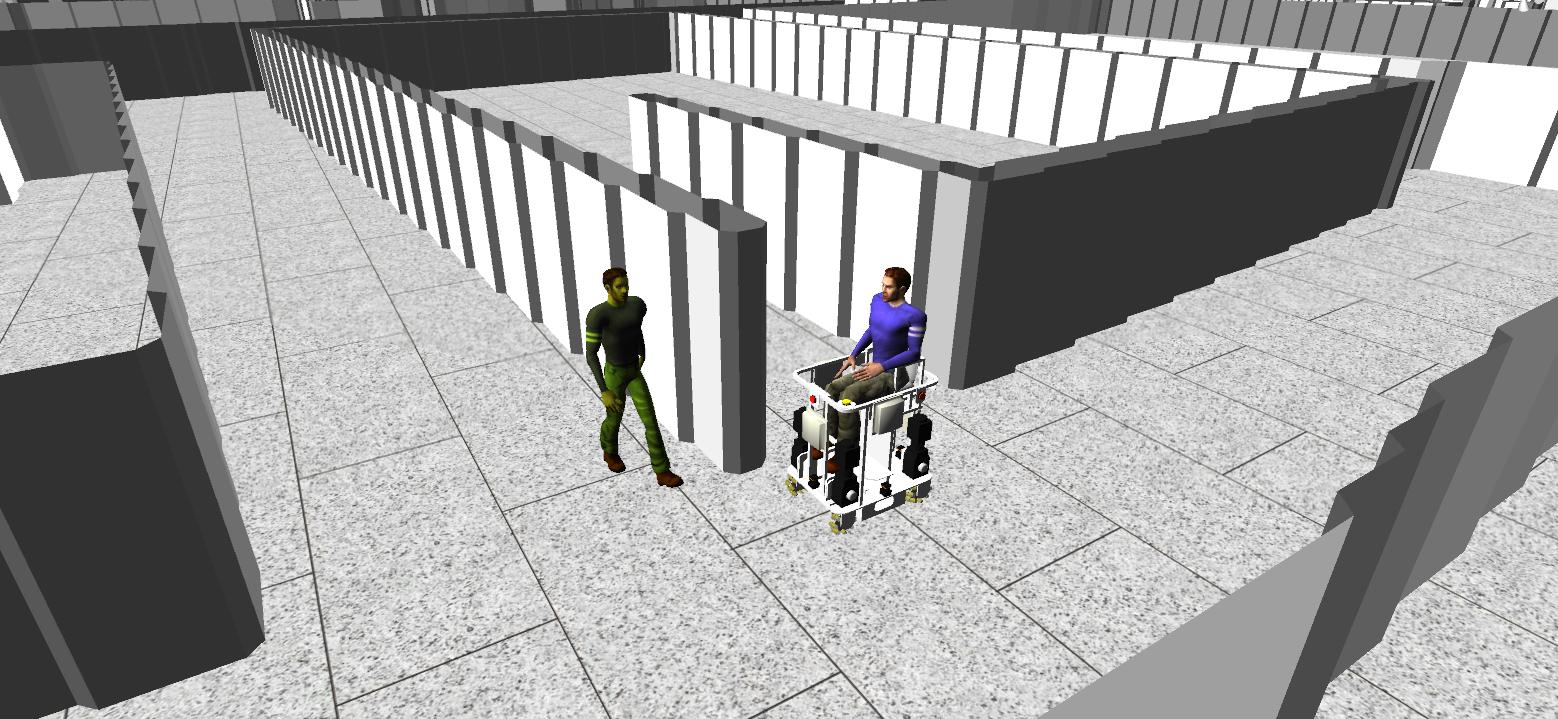
図1.5: シミュレータ上で検出された危険な状況の例
1.5 本論文の構成
以下に次章以降の本論文の構成を示す。第2章では、個人用知的移動体ATと小型無人移動体SUVについて、それらのコンセプトと機能について詳しく述べる。第3章では、ATとSUVに実装した自動走行の仕組みについて詳しく述べ、第4章では、SUVによって、どのようにATの自動走行をより安全にするかについて述べる。第5章では、シミュレータ上で行った、提案手法の評価実験について、そのシミュレータの仕様と実験結果を含めて述べる。第6章で、本研究の関連研究について述べ、最後の第7章で、まとめと今後の課題について述べる。
2 個人用知的移動体と小型無人移動体
筆者の所属する研究室では、人間の生活において最も基本的で重要な要素の一つである「移動」に着目し、移動体を用いて人間を物理的に移動させることで、我々の生活する実世界と情報の世界をより密接に関連付ける仕組みを探求している。人間にとって「移動」は、自立的かつ快適に生活するために必要不可欠な行動であり、我々は生活の多くの時間において「移動」しなければならない。そのために人間はこれまで、自動車・バイク・車椅子など様々な移動体を数多く作り上げ、現在もそれらを幅広く利用している。このような状況で、情報技術を人間の生活に役立たせるために、人間の「移動」と情報との新たな関係を構築することを目指す。そのためには、日常的な移動体そのものを情報端末とする手法が考えられる。つまり、乗り物に情報処理・通信機能を持たせ、情報処理と人間の物理的な移動を連動させる、搭乗型(マウンタブル)コンピューティングという考え方である。この搭乗型コンピューティングのコンセプトのもと、情報端末化した移動体の一つとして、我々はAT(Attentive Townvehicle)と呼ばれる、個人用の知的移動体を設計・開発している(図2.1右)。ATは、搭乗者である人間や自身を取り巻く環境に適応し、他の移動体との通信によって協調的に動作することが可能な個人用の乗り物である。また、本研究ではATと連携して自律走行する小型無人移動体(SUV: Small Unmanned Vehicle)を開発し、それにATの安全性を向上させるための拡張型センサーとしての機能を実現した(図2.1左)。本章では、ATとSUVのコンセプト、各種センサーを含むATとSUVに搭載された主要なデバイスについて説明する。

図2.1: 個人用知的移動体(右)と小型無人移動体(左)
2.1 ATのコンセプト
ATは、搭乗者である人間やAT自身を取り巻く環境に適応することで、搭乗者を支援する、全方位移動・自動走行可能な個人用の乗り物である。図2.2に示すようにATにおける研究テーマは多岐にわたっている。以下にそれぞれのテーマについて説明する。
ATと環境とのインタラクション ここで言う環境とは、物理的環境(実世界)と情報的環境(情報世界)の2つの意味を持つ。物理的環境とは、人間やATと物理的に作用し合う環境である。人間が感覚によって物理的な世界を認識するように、ATはセンサー類によって世界を認識し、人間が運動によって物理的な世界に影響を与えるように、ATはモーターによって物理的な世界に影響を与える。一方、情報的環境とは、地図情報などの、ATがアクセスできるコンテンツやサービスの集合を示している。これに関連して行われた研究に、実世界対象物の認識手法[9]や、場所に連動した情報コンテンツの利用[10]や、3次元地図の自動生成に関する研究[11]などがある。
ATと人間とのインタラクション ATが搭乗者の特性を把握し、情報処理を搭乗者に適応させる、個人適応という考えに関する研究課題がある。搭乗者によって、提示するインタフェースやATの移動速度を変化させたり、搭乗者の嗜好やその場の状況に応じた情報を提示するなどの研究が行われている。また、ATが搭乗者を識別してインタラクションを行う例として、これまでにはATを降りた搭乗者を追尾する研究[12]や、ジェスチャによる操縦インタフェースに関する研究[13]が行われてきた。
AT間(移動体間)のインタラクション 移動体間通信を行うことで、AT同士が協調して走行することができる。これまでに、お互いに接近しているAT同士が衝突回避を行う研究[14]や、無人のATが有人のATを追尾するなどの研究[15]が行われてきた。また、AT同士の通信だけでなく、搭乗者間のコミュニケーションを共有・再利用するなどの研究[16]も行われた。
ATの個体としての自律性 人間の生活において基本的な部分をなす「移動」を支援するために、自動的に目的地へ到着する機能を実現するという研究課題である。到着することだけが目的ではなく、いかに効率よく移動するかという問題もこのテーマに含まれる。ATのマニュアル操作の際に、障害物と衝突しないように補正する補助走行についての研究[17]や、SUVを環境に独立して走らせ、環境内の通行不能箇所を検出し、その情報を元にATの経路生成を効率化させる研究[18]などが行われてきた。
ATの搭乗者の安全性 ATのような、人間を乗せて自動走行をする移動体は、特に安全性の問題について慎重に対処する必要がある。具体的には、AT自身の持つセンサーや環境側のセンサーなどを利用して環境情報をできるだけ正確に取得することで、安全な走行を実現するという研究課題がある。本研究のテーマも主にここに位置付けられる。
以上のように、ATは、搭乗者や環境や他のATと、センサー類を用いて様々なインタラクションを実現することによって、搭乗者である人間や、環境への適応が可能な移動体を目指している。

図2.2: ATに関わる研究テーマ
2.2 ATの構成
本節では、図2.3に示している、ATの構成を説明する上で特に重要になるデバイスおよびセンサーである、メカナムホイール、レーザーレンジセンサー、ロータリ-エンコーダ、3軸角度センサーについて説明し、それらを用いて実現されるATの特徴・機能について説明する。
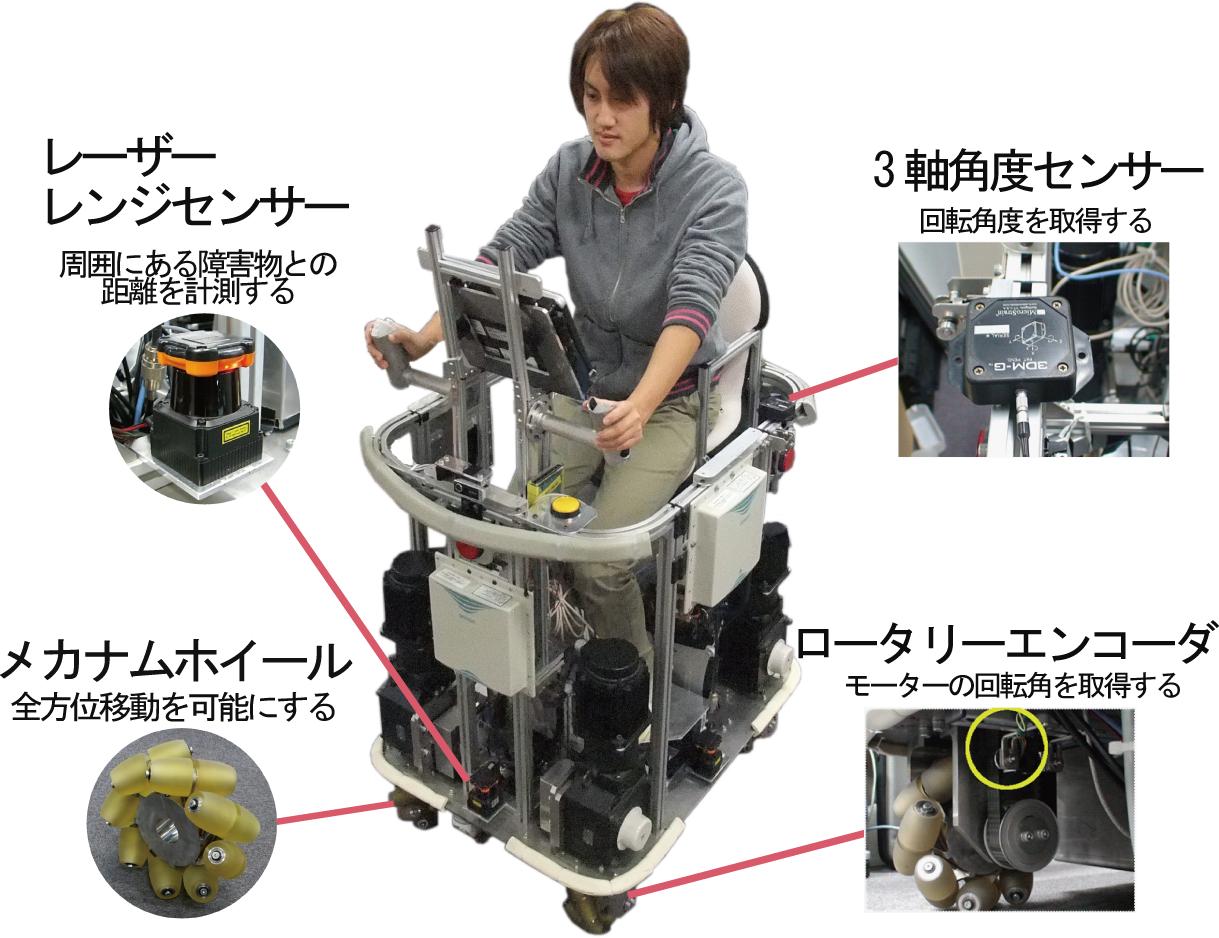
図2.3: ATの主要な構成要素
2.2.1 メカナムホイール
ATはメカナムホイールという特殊なホイールを4個用いており、全方位移動を可能である(図2.3)。メカナムホイールは車軸に対して45度傾けられた小型のローラーを車輪の周囲に等間隔に複数個(たとえば、8つ)並べて取り付けられた車輪である。本体としての車輪はモーターによって制御することができるが、周囲のローラーの回転は制御できず、空転するのみである。メカナムホイールは正転する際、ホイール自体は前方向に移動するように回転するが,車軸に対して45度傾けられた方向に配置されたローラーにより、ローラー軸方向に対して法線方向の推進力が生じない。この結果、メカナムホイールは,ローラー軸と平行の方向に推進力が発生する。したがって、4輪の進行方向の組み合わせによって全方位移動が可能となる。ATは、全方位移動ができる特性を活かして、障害物を回避する際に車体の向きを変更することなく、そのまま横や斜めに移動できる(図2.4)。この仕組みには、車などの移動体のように、回避する際に、現状よりも対象に接近することなく回避することができ、方向転換に余分な空間を必要としない、といった利点がある。
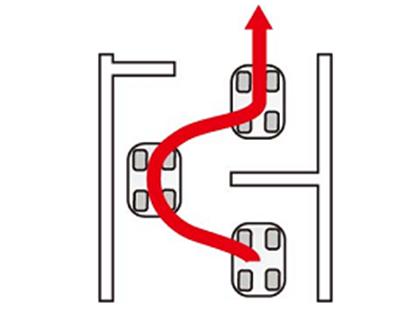
図2.4: 全方位移動による障害物の回避
2.2.2 レーザーレンジセンサー
ATは、自分から見た障害物までの距離と角度を知ることができるレーザーレンジセンサーを搭載している(図2.3)。このセンサーは、物体にレーザー光をあて、その反射光を受光して物体までの距離を算出する。この方法で、一定角度間隔で距離を測定することで、平面上に扇状の距離情報を、最大30m、角度240度の範囲で得ることができる。なお、レーザーレンジセンサーには北陽電気のUTM-30LX[http://www.hokuyo-aut.co.jp/02sensor/07scanner/utm\_30lx.html]を使用した。このセンサーをATの前後左右に1つずつ計4つ装備した。レーザーレンジセンサーはそれぞれ図2.5のように180度の範囲の障害物を検出するように設定し、ATから見た角度にセンサーの死角が無いように設置している。ただし、床面からの高さが約30cmの位置にセンサーを固定しているため、その高さの床面に平行な平面上のみがスキャンされる。実際にスキャンした様子が図2.6である。レーザーレンジセンサーはATの目として様々な用途で使われる。例えば、移動障害物を検出して、避ける方向を決めたり、自動走行時に壁の位置と向きを検出して自分の向きを補正したり、コントローラーによるマニュアル走行時に障害物にぶつからないように補助する時などに利用されている。
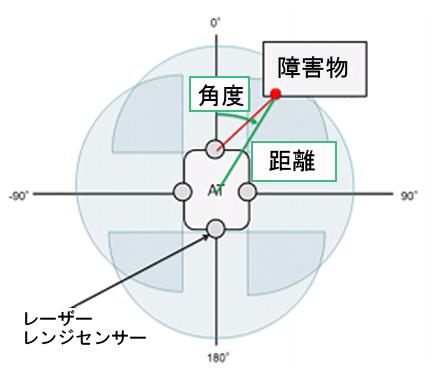
図2.5: 4つのレンジセンサーの結合
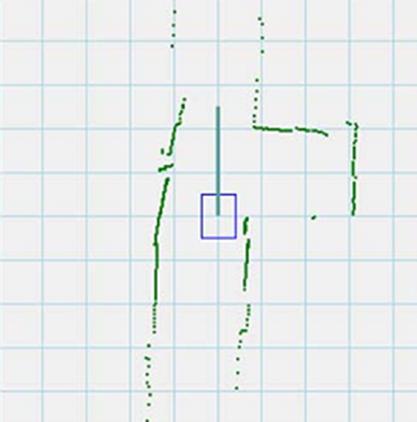
図2.6: レンジセンサーによる障害物の検出
2.2.3 ロータリーエンコーダと3軸角度センサー
ATには車輪の回転数を知るためのロータリエンコーダと、現在の向きを知るための3軸角度センサーを搭載されており、その情報からオドメトリの計算を行う。なお、オドメトリ情報とは、タイヤの回転角度などから推定する移動体の相対的な移動量(前回の位置からの移動距離と前回の向きとの角度変化分のベクトル)である。ATは2.2.1項で説明したように、メカナムホイールという特殊なホイールで全方位移動を実現している。ATの後方左側のメカナムホイールのベルト部分にロータリエンコーダを取り付け、そこで取得した信号をマイコン(PIC)で計算することでATにホイールの回転数を伝達する。ホイールの回転数にホイール一周で進む距離をかけることでATの走行距離を計算することができる。しかし、4つのホイールが独立な力で回転することにより直進以外の全方位移動やその場回転を行っているため、一つのホイールにロータリエンコーダをつけるだけでは全方位移動、その場回転のオドメトリを計算することはできない。そこで、本研究ではATが直進移動とその場回転の時だけのオドメトリを取得した。直進の制御をしている間はロータリエンコーダ、その場回転の制御をしている間は3軸角度センサーと使い分けることによりATのオドメトリ情報を計算している。なお、ATのロータリエンコーダはオムロンのE6A2-C、3軸角度センサーはMicroStrainの3DM-Gを使用した。
2.3 SUVのコンセプト
誰かの後ろに付いていく方が、一人で歩くより安全であろう。そのような直感から、1.2節で述べた自動走行の安全性に対する問題へのアプローチとして、小型で無人の移動体を先に走らせることで、後ろを走る移動体の搭乗者の安全性が向上するのではないかという着想に至った。そこで本研究では、SUVをATの自律走行する拡張センサーとして位置付け、それに基づく、ATの安全性を向上させるための新しい手法を提案する。1.2節でも述べたように、ATが自動走行中に、死角となる領域から接近する移動障害物を移動体自身のセンサーで検知することができないことは安全性に関する重大な問題の一つである。それゆえ、死角から接近している人間を安全に回避することは困難である。このような問題は、移動体そのものの持つセンサーでは不十分であり、いかに環境側に周囲の情報を収集し伝達する仕組みを実現するか、ということが重要になってくる。しかし、複雑で数多く存在する通路の全域に渡ってそのようなインフラを整備することはコストの面で実現が困難である。よって上記の問題を、インフラとして環境にセンサーを設置するやり方以外の方法でするべきと考える。ところで、搭乗者の安全のために移動体が走行可能な全ての地点の環境情報を知る必要はあるだろうか。例えば、現在地から遠く離れた地点の環境の情報が搭乗者の安全性に大きく関わってくることはあまりない。一方、進行方向の前方の死角に移動障害物が接近している場合、その情報を取得することは搭乗者の安全性と大きく関係する。つまり、搭乗者の安全のために知りたい情報の重要度が、全ての地点で同等ではなく、一部の情報、特に進行方向前方に集中していると考えられる。そこで、その領域をATに代わってセンシングするために、ATの前方にSUVを自律走行させる。センシングした情報をATに伝達することで、ATは自身のセンシング領域をSUVによって拡張することができる(図2.7)。図2.7の青色で表される領域はSUVのセンシング領域で、黄色はATのセンシング領域であるが、ATはSUVのセンサー情報を知ることができるため、青色の領域の障害物情報も知ることができる。

図2.7: 小型無人移動体(SUV)による死角からの移動障害物の検知
2.4 SUVの構成
SUVは、ベースとなる移動体として二輪走行機構、障害物を認識するためのレーザーレンジセンサー、移動障害物(特に、人間)を認識するための深度センサー、そしてそれらを制御するためのノートPCから構成されている(図2.8)。なお、CPUがCore i7 2.80GHz程度のノートPCを使用した。以下で、二輪走行機構、レーザーレンジセンサー、深度センサーについて説明する。

図2.8: SUVの構成
2.4.1 二輪走行機構
SUVはベースとなる移動体としてiRobot社のiRobot Createを使用している(図2.9)。iRobot Createは、お掃除ロボットとして知られるRoombaをベースとした、教育・開発者向けのプログラム可能なロボットである。iRobot Createはサーボモーターによって独立に動く二つの車輪を持ち、これにより前後移動・その場回転・カーブ移動が可能である。速度は-500mm/sec~500mm/secの範囲で可変である。また、二つのタイヤの回転数を内部で計算することによって、走った距離と回転角度(オドメトリ情報)を知ることができる。このオドメトリ情報は必ずしも正しい値ではなく、誤差を含む値である。モーターの回転数が高出力の時と、低出力の時の誤差は特に大きいが、3.2節で説明する位置推定の機能で現在位置を推定するための情報としては十分な精度である。これについては3.2.3項で詳しく説明する。また、iRobot Create本体には様々なセンサーが標準で搭載されている。バンパーセンサー、ホイールセンサー、PSDセンサー、IRレシーバーである。このうち、バンパーセンサーはiRobot Createの前面の左右にそれぞれ1個ずつ装備し、進行中に右のバンパーセンサーが反応したら左へ回転し軌道を修正するなど、このセンサーの値によってSUVの動作を決定することができる。また、壁と衝突した時の衝撃を吸収してくれる。ホイールセンサーはタイヤが地面に着いているかを調べるセンサーである。タイヤが地面に着いていない時は、制御PCの信号を無視して必ずモーターの回転を停止する機能を持つ。PSDセンサーはiRobot Createの側面の壁との距離を測ることができるが、SUVはレーザーレンジセンサーによって、広範囲の障害物までの距離を測定可能なため、本研究ではPSDセンサーは使用しない。IRレシーバーは赤外線の信号を受信することができるセンサーである。これによりiRobot Createに付属するリモコンから命令を送信することができる。
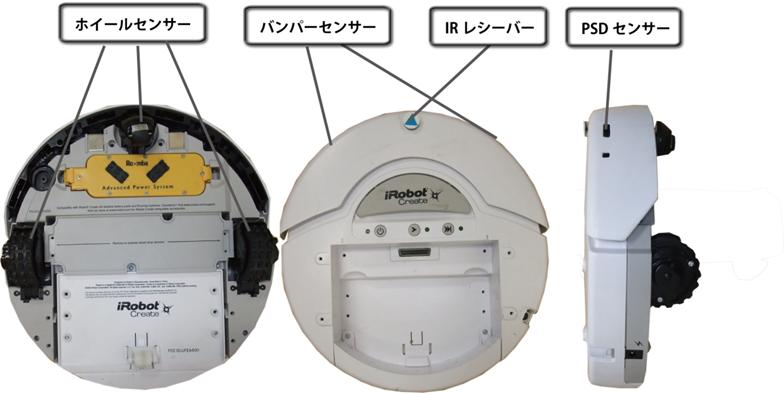
図2.9: iRobot Createのセンサー
2.4.2 レーザーレンジセンサー
SUVには2.2.2項で説明したATに装備されたものと同じレーザーレンジセンサーが搭載されている。図2.10のように前後1つずつレンジセンサーをもち、それぞれの測定範囲を統合することで、全方位の障害物の距離を検知することができる。ちなみに、前のレンジセンサー1台のみの構成でも、3章で説明する自動走行の仕組みには支障はない。ただし、レンジセンサーの取得可能範囲が広いほど、3.2節で説明する位置推定の精度が向上する。
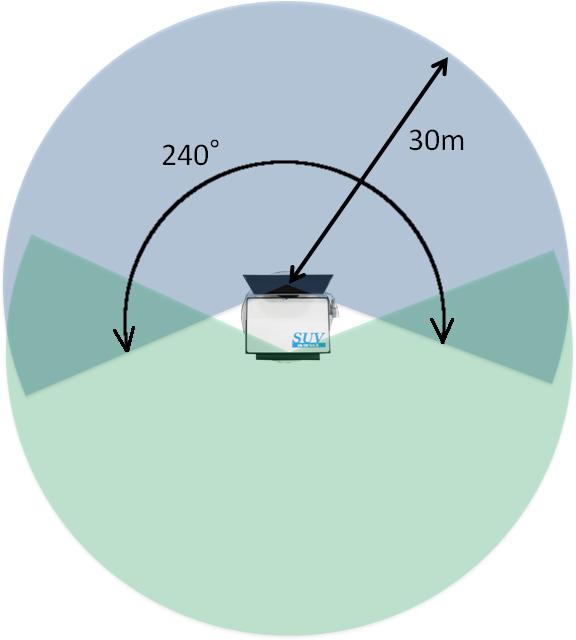
図2.10: レンジセンサーの取得可能範囲
2.4.3 深度センサー
SUVにはKinect\footnote{Kinectは米国Microsoft Corporationの米国およびその他の国における登録商標である。}と呼ばれるデバイスが搭載されている。KinectはRGBカメラに加えて,カメラから物体までの距離が計測できる深度センサーを持つデバイスである。平面上の障害物までの距離が計測できるレンジセンサーと異なり,物体の形状認識に適しているため,特に歩行者の認識に適している。図2.11は深度センサーによって移動障害物の検出を行っている様子である。図2.11右には、深度センサーによって検出された移動障害物の領域が青く表示されている。SUVはATの拡張センサーとして、死角から接近する移動障害物を検出する機能が特に重要であるため、前項のレンジセンサーに加えて深度センサーによって移動障害物を検出する。これについては4.3.2節で詳しく説明する。

図2.11: 深度センサーによる移動障害物の検出
edit...
3 移動体の自動走行
ATとSUVは指定した目的地に対して自律的に移動する仕組みを必要とする。この仕組みは移動ロボットの基本的な機能として数多く研究されており、その多くは次の4つのステップの実現を主な課題としている[Thrun, S., Burgard, W., and Fox, D.: ``Probabilistic Robotics," The MIT Press, 2005. 上田隆一 (訳): 確率ロボティクス, 毎日コミュニケーションズ,2007.]。
- 環境地図生成
- 自己位置推定
- 経路生成
- 自動走行の制御
1はATとSUVが自己位置を推定したり、走行可能領域を識別するために事前に地図を作成するタスクであり、2は作られた環境地図上で現在の自分の姿勢(位置と向き)を推定するタスクで、3は指定された目的地まで環境地図上のどこを走るかを決定するタスクである。4は生成した経路を実際に走行するために制御を行うタスクである。それぞれのタスクに関して様々な手法が提案されているが、本章ではATとSUVに実装した手法について説明する。
3.1 環境地図生成
移動体が現在地を把握し、目的地を決定し、その場所まで自動走行をするためには、走行する物理的空間の地図が必要である。本研究では、この地図を環境地図と呼ぶ。環境地図は以下の2つの情報から構成される。
- 占有格子地図
- グラフ構造データ
1の占有格子地図とは、等間隔の格子に配置された確率変数で表現される地図のことであり、確率変数の値が高いほどその領域が物体によって占められている可能性が高いことを意味する。図3.1のグレイスケールで表されているのが占有格子地図の例である。白い領域は何もない走行可能な領域、黒い領域は壁などの障害物によって通れない領域、灰色の領域はセンサーで取得できなかった未知の領域である。3.2節で説明する位置推定機能では、この地図と移動体のセンサー情報を比較することで、占有格子地図上の移動体の位置を推定することができる。また、占有格子地図は地図を作成した時点での障害物の地形的位置関係を示した情報であるため、地図にない情報、つまり移動した静止障害物または移動障害物を検出するのに有効である。この情報は、本研究の提案手法の一つであるセンシング領域の拡張にとって重要な情報である。これについては3.3.2項で詳しく説明する。また、占有格子地図の具体的な生成方法を3.1.2項で説明し、生成された地図と実環境の誤差を3.1.3項で説明する。
2のグラフ構造データはノード情報とエッジ情報から構成され、ノード情報は占有格子地図の座標と関連付けられた点であり、環境のその地点の状態や属性を表す。エッジ情報はノード間が通行可能かどうかを表す情報である。このグラフ構造データを用いることで、入力された目的地に対する経路の探索や、移動障害物や地図上にない静止障害物に対する柔軟な対応を可能にする。これについては3.3.2項で説明する。また、このグラフ構造は占有格子地図から自動生成することが可能である。図3.1の水色で表されている円と線がグラフ構造の例である。グラフ構造の生成方法については3.1.4項で説明する。
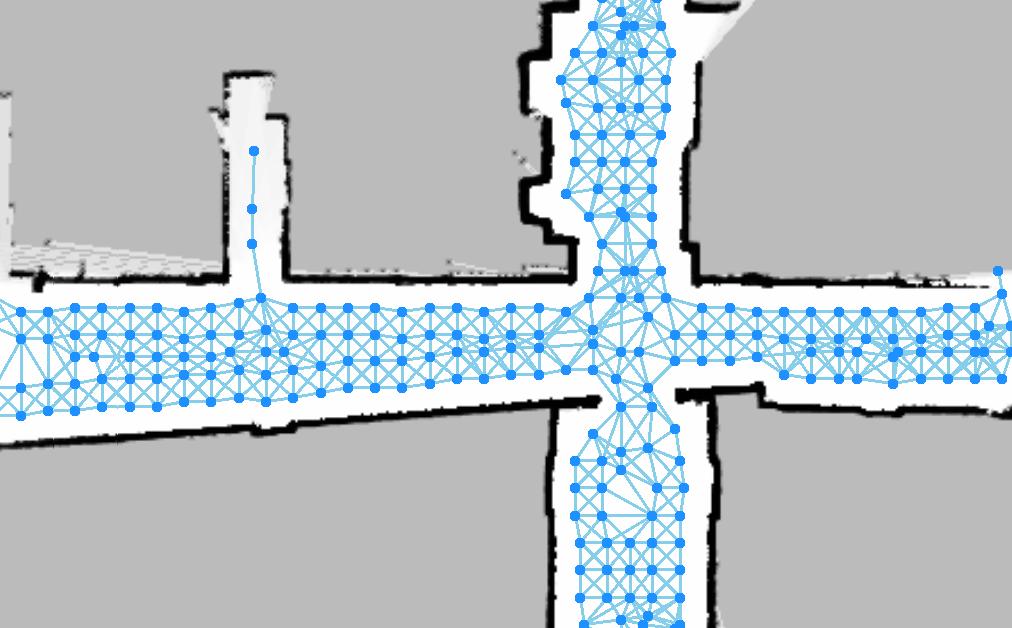
図3.1: 環境地図の占有格子地図とグラフ構造データ
3.1.1 SLAM問題
本節の冒頭で説明した占有格子地図を生成するためには、移動体のオドメトリ情報(これまでの移動距離情報)とセンサー情報から、自己位置と地図を同時に推定しなければならない。これはSimultaneous Localization and Mapping (SLAM)問題として有名な問題\cite{SLAM1}\cite{SLAM2}\cite{SLAM3}\cite{SLAM4}\cite{SLAM5}である。SLAM問題とは時刻0からtまでにおけるセンサー情報$z_{0:t} (={z_{0}, z_{1},..., z_{t}})$とオドメトリ情報$u_{0:t}$が与えられた状態での、時刻$t$の姿勢$a_t=(x_t,y_t,θ_t )$、占有格子地図を表す確率変数の行列$m$(行列の要素は0から1の実数値)の事後確率$p(a_t,m|z_{0:t},u_{0:t})$の分布関数を求めることである。姿勢$a_t$は、時刻tでの位置$p(x_{t},y_{t})$と向き$\theta_{t}$を表す。SLAM問題の難しい点はとは、センサー情報$z_{0:t}$とオドメトリ情報$u_{0:t}$のどちらも誤差を含む値なので、それらを考慮しなければならないことである。SLAM問題に対しては数々の手法が提案されている[19][20][21][22][23]。筆者が所属する研究室では、このSLAM問題を解決する手法の一つであるICP(Iterative Closest Point)アルゴリズム[Besl, P. J., and McKay, N. D. A Method for Registration of 3-D Shapes IEEE Trans. Pattern Anal.Machine Intell . 14 239-256 1992]による地図生成を実現した。次に具体的に説明する。
3.1.2 占有格子地図の生成方法
本節の冒頭で説明した占有格子地図の生成方法について説明する。地図生成の対象となる実環境で、前述のSUVを手動操作で走行させ、レーザーレンジセンサーの計測記録から2次元の占有格子地図を生成する。占有格子地図を表す確率変数の行列$m$を、時刻0から$t$までの姿勢の列を表す$a_{0:t} (={a_{0}, a_{1},..., a_{t}})$と、センサーの計測値$z_{0:t}$から求める。センサーの計測値$z_{0:t}$は時刻$t$におけるセンサーのレンジ内の障害物までの距離(単位はmm)と、センサーから障害物への方向(単位はラジアン)を表すベクトルの組である。最も確からしい$m$を求めるためには、すべての$m$の可能性について$p(m|z_{0:t},a_{0:t})$を計算し、尤度が最大となる$m$を求めればよい。しかし、すべての$m$について$p(m|z_{0:t},a_{0:t})$を求めることは計算量的に困難であるので、$m$の点$(i,j)$における確率変数を$m_{i,j}$とし、$p(m|z_{0:t},a_{0:t}) = \prod_i \prod_j p(m_{i,j}|z_{0:t},a_{0:t})$と近似することで、各格子の確率変数値を推定する問題に分解する。レンジセンサーの値から $ p(m_{i,j}|z_{0:t},a_{0:t})$を求める方法はinverse range sensor model[Thrun, S., Burgard, W., and Fox, D.: ``Probabilistic Robotics," The MIT Press, 2005. 上田隆一 (訳): 確率ロボティクス, 毎日コミュニケーションズ,2007.]を使用した。このアルゴリズムはセンサーと姿勢の誤差に強く、誤差があった場合も障害物がある地点では1に収束、ない地点は0に収束しやすい。センサーの値$z_{0:t}$と姿勢$a_{t}$には誤差が含まれるため、誤差に強いこのアルゴリズムを使用した。実際に計測したデータから地図を求める手法について説明する。各時刻において、尤度が最大となる姿勢を探索し、その姿勢において地図を更新していく。具体的な手順としては、移動体を走行させることによって得られるオドメトリ情報$u_{0:t}$と、レンジセンサーの情報$z_{0:t}$から以下の方法で求める。
1.$m$の初期値として、全ての要素に未知を意味する0と1の間の値を代入する
なお、多くの環境地図では、障害物が存在する領域の面積より障害物が存在しない領域の面積の方が大きいため、ここでの値を0.5より0に近い値にする方が収束しやすい。
2.地図作成時の出発地点 $a_{0}$ を原点として、$p(m|z_{0},x_{0})$を求める
時刻$i (1 \leq i \leq t)$に対して 3-4 を実行
3.ICP アルゴリズムにより$p(a_{i}|m,z_{i},a_{i-1},u_{i})$が最大となる$a_{i}$を探索する
4.3 で求めた$a_{i}$によって$p(m|z_{i},a_{i})$を求め、$m$を更新する
以上の手法を用いて生成された占有格子地図の例を 図3.2 に示す。画像の各画素の色の濃さが占有格子地図の各格子の確率変数の値の大きさを表す。黒は障害物有り、白は障害物無し、灰色が初期状態を表している。各格子の間隔は50mm、SUVが300mm進むごとに記録したデータに基づいて作成した。なお、参考文献[Thrun, S., Burgard, W., and Fox, D.: ``Probabilistic Robotics," The MIT Press, 2005. 上田隆一 (訳): 確率ロボティクス, 毎日コミュニケーションズ,2007.]によれば、屋外の環境地図の場合、適切な間隔は経験的に150mm程度であることが述べられている。これ以上間隔を大きくすると、位置推定の精度が下がり、間隔を小さくすると、環境地図のサイズが大きくなり、実時間での計算が困難になるためである。本研究では屋内の環境地図を作るため、若干状況が異なる。屋内は屋外に比べ道幅が狭いため、より正確な現在位置を把握する必要がある。現在位置の精度は環境地図の格子の間隔に依存するため、現在位置の精度を高めるために格子の間隔を50mmとした。

図3.2: 生成された占有格子地図
3.1.3 実環境と生成された地図の比較
前項で生成された占有格子地図がどの程度正確か、実環境と比較することで検証した。具体的には、以下の二点について検証した。
1.生成された地図が実環境とどの程度相似であるか
図3.4はSUVによって生成された地図であり、図3.5はその地図の壁部分を抜き出した図である。図3.5と図3.3の見取り図を重ね合わせることで、実環境と生成された地図が相似な形をしているかを調べた結果、図3.6に示すように、見取り図とかなり正確に重なっていることが分かる。一番下の、黒字で9.91と書かれている壁は見取り図と、生成された地図でずれているように見えるが、見取り図の壁は柱の外側を結ぶ線であるため、これは外壁の線である。よって全体的に相似な地図になっていることが分かる。また、生成された地図ではエレベーターの下側に壁があり見取り図にはない。しかし、実際には薄い壁があり、見取り図と実際の環境は若干異なっている。
2.生成された地図と実際の距離情報にどの程度の誤差があるか
生成された地図はレンジセンサーを用いて作られた地図なので、距離情報を含んでいる。地図上での距離がどの程度正確であるか、実環境の壁の長さを測ることで比較したところ、図3.6に示されるような結果になった。この図で、太い黒字で書いてあるのが実際に計測した距離で、赤字が生成された地図の長さである。単位はメートルである。誤差が一番大きいのは、実際は9.91mで地図上では9.83mの壁である。誤差は-0.8% で、誤差はあまりないことが分かった。
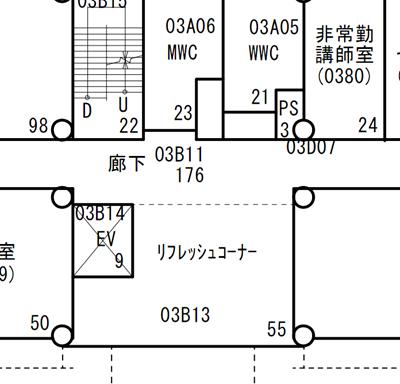
図3.3: 環境の見取り図

図3.4: レンジセンサーにより生成された地図
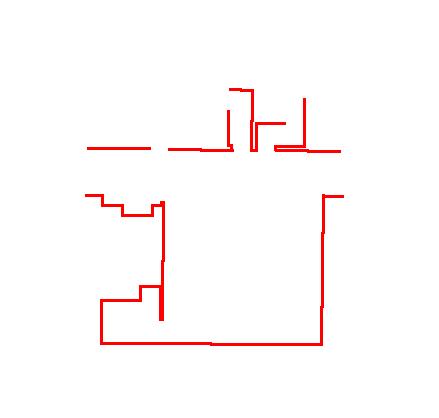
図3.5: 生成された地図の壁を抜き出した図
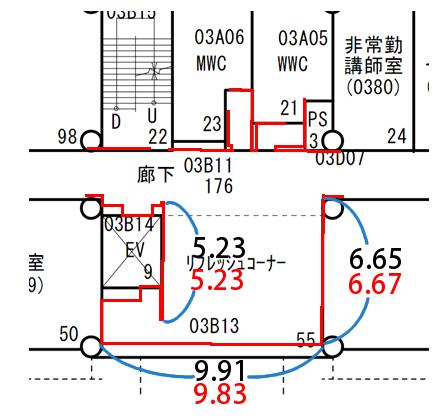
図3.6: 実環境と生成された地図の比較
3.1.4 グラフ構造の生成
本節の冒頭で説明した通り、環境地図には壁などの障害物の位置関係を保持する占有格子地図と、経路計算や地図の部分的な領域・地点の属性を保持するグラフ構造データがあり、本項ではグラフ構造データの生成方法について説明する。占有格子地図は地図上の格子ごとにその場所が物体に占められている確率を表現している。その値が一定の閾値以下である領域を走行可能領域として、走行可能領域に経路生成のためのグラフ構造データを自動で生成する。その生成手法は、次の通りである。まず、図3.7の黒い線で表されている障害物から一定距離内の領域を塗りつぶし、その境界線にノードを一定間隔で追加する。さらに、障害物から一定距離外の領域を塗りつぶし、その境界線にも同様にノードを追加する。図3.7のピンク色の点はこの手法で生成されたノードである。生成されたそれぞれのノードについて一定距離内にあるノードをつなげることによってグラフ構造データを作る。図3.8は生成されたグラフ構造データを表している。また、占有格子地図上では通行可能な領域ではあるが、人間の都合によって移動体に通って欲しくない場所や、地図作成後に障害物が置かれたことによって通行不可能となる場所が存在する場合が考えられる。これに対しては、前者は環境地図生成システムのGUI上から簡単に手動でグラフ構造データを編集できる機能、後者はレンジセンサーから取得した値と地図の間で不整合が生じた際にグラフ構造データを更新する機能を用意することで、柔軟な経路生成を可能とした。地図にない障害物によるグラフ構造データの更新については、さらに3.3.2項で説明する。
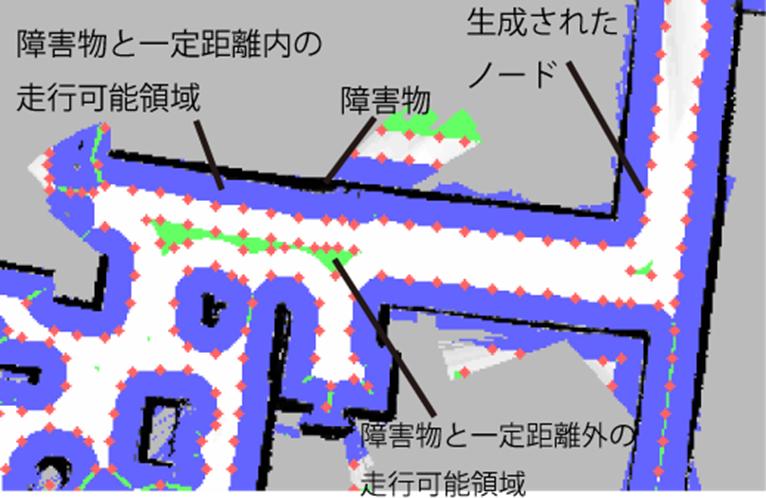
図3.7: 地図上の障害物とその境界線
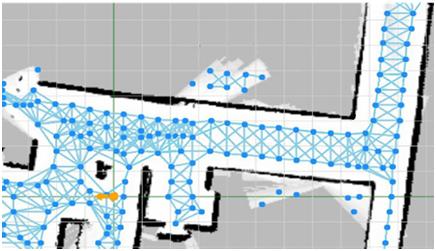
図3.8: 地図に付与されたグラフ構造
3.2 自己位置推定
ここでの自己位置推定とは、前項で生成した環境地図と現在のレーザーレンジセンサーの値を比較することで、環境地図上での位置を推定する機能である。前項で説明した地図生成のアルゴリズムのステップ3のように、ある時刻$i$において$p(a_{i}|m,z_{i},a_{i-1},u_{i})$が最大になるような$a_{i}$を求めるという点では、自己位置推定は地図生成と同じ問題である。しかし、自己位置推定時には地図を更新する必要がないため、精度よりも物の配置が若干変化した状態などでも一定の誤差以内で$x_i$を推定できる仕組みの方が重要である。そのため、確率的に位置を推定していくパーティクルフィルタ[Thrun, S., Burgard, W., and Fox, D.: ``Probabilistic Robotics," The MITPress, 2005. 上田隆一(訳): 確率ロボティクス, 毎日コミュニケーションズ, 2007.]を、自己位置推定に用いた。次項ではこの方式による自己位置推定の方法について説明する。
3.2.1 パーティクルフィルタによる自己位置推定
パーティクルフィルタは確率的シミュレーション(推定したい確率変数に誤差を加えることで発散させ、尤度を計算することで収束させる手法)によるベイズモデルの推定法の一種である。本項の冒頭で説明した事後確率$p(a_{t}|m,z_{1:t},u_{1:t})$の分布関数をパーティクルフィルタで求めることで自己位置推定を行った。パーティクルフィルタによる自己位置推定は次の4ステップで行われる。
1. 予測
各パーティクルについて、次の運動モデルに従って次状態の$a_{t}$を予測する。$a_{t}= a_{t-1}+ R_{t-1} (u_t+ w_t)$ \\$R_t : a_tの向きへの回転行列$ \\$w_t$ : オドメトリ誤差を表す正規分布$N(0,\sum _W)$に従った乱数(ここでの$\sum _W$は経験的に求めた。また乱数はボックスミューラー法により計算した)
2. 尤度計算
各パーティクルについて尤度$p(z_t|a_t,m)$を個々の計測値に対する尤度の積$p(z_t|a_t,m)= \prod_{k=1}^K p(z_t^k |a_t,m)$で求める。個々の尤度は、計測値から占有格子地図上の障害物の最近傍点を求め、最近傍点と計測値のユークリッド距離をM-estimator[24]で評価した。また、最近傍点はkd木[25]によって求めた。M-estimatorは例外値に小さな重みを与えるような評価関数で、計測値には環境地図に存在しない点が含まれる可能性があるのでこの評価方法を使用した。またkd木は高速な最近傍探索として知られるアルゴリズムである。
3. リサンプリング
前の状態の各パーティクルの尤度を元にパーティクルを選び直す。高い尤度が与えられたパーティクルを多くのパーティクルにコピーし、尤度の低いパーティクルを消去することにより、パーティクル数を一定に保つ。
4. 位置の決定
パーティクルの分布の平均を現在位置とする。以上の方法で位置を推定するが、この方式は最尤の自己位置を一意に決める ICP とは異なり、パーティクルの分布から自己位置を決めるので、多少の誤差はあるが、動的に障害物の位置が変化する実環境においては、よりロバストな手法になっている。
AT や SUV はそれぞれの位置を相互に伝達することが可能である。そのため、レンジセンサーから取得した値のうち AT または SUV の付近の値は移動障害物と見なし、そのデータを自己位置推定において地図とのマッチングには用いない仕組みを導入した。ここでの自己位置推定は、地図の更新が行われないことと実時間で推定する必要があることから、誤差を小さくすることよりも処理速度とロバスト性を上げることが求められる。処理速度を上げるためにレンジセンサーの分解能を15度に設定し、ロバスト性を上げるためにパーティクルを多めの500個用意した。1回の自己位置推定にかかる処理時間は10msec以下(CPU は Core i7 2.80GHz)で、これを1秒間に4回繰り返すことで、オドメトリの誤差に対してロバストな自己位置推定を行うことができた。
3.2.2 パーティクルフィルタによる自己位置推定の性質
前項の仕組みで姿勢を推定した。本項ではパーティクルフィルタでの自己位置推定の性質について説明する。なお、この項の説明として使用する図の水色で表される領域は占有格子地図の障害物部分を抜き出した領域である。
1.オドメトリに急激な誤差が現れても正解のパーティクルが含まれていれば収束する。
図3.9左はオドメトリに急激に誤差が乗った時で、図3.9右がその後3回自己位置推定を行った後の状態である。水色が地図情報を表し、オレンジが自己位置推定したSUVの現在地を表し、青が現在のセンサーの値を表している。

図3.9: オドメトリの誤差の収束
2.特徴が少ない時にはパーティクルは分散し、特徴が多い環境では収束しやすい。
図3.10左を見るとSUVの周りに赤い点が散らばっているが、この点は一つのパーティクルの現在地を表す。この図では左の壁と右の壁しかセンサー情報がないため、縦にパーティクルの分散が広がっている。しかし、図3.10右はその後突き当たりの壁をセンサーが認識するようになることで縦方向の分散が収束している。

図3.10: パーティクルの分散の増大、減少する場所
3.地図作成時と多少物の配置が変わっていたり、周りに人がいたりするなど、地図情報と多少ずれがあっても大まかに合っていれば収束する。
図3.11左のように地図生成時にない静止障害物(図の緑の部分)を環境に置いた状態で自己位置推定を行ったのが図3.11右である。現在のセンサーの値で地図との重なりがない部分存在しても他のセンサー情報の重なりにより自己位置推定ができている。
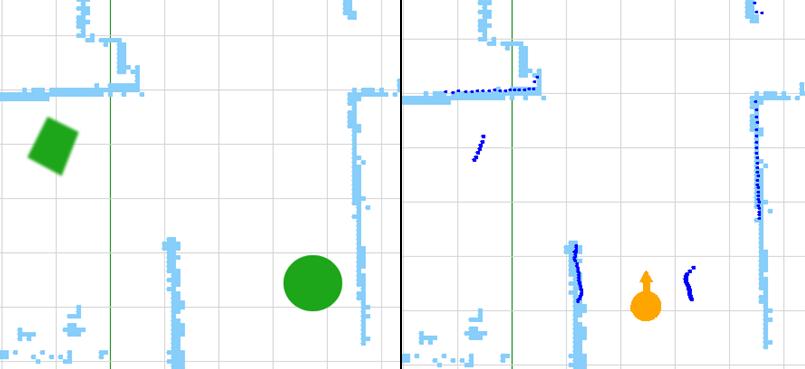
図3.11: 動的環境での収束
以上の性質は実環境を走るためには有効な性質である。性質2のような特徴点が少ない環境で分散してしまうのは、真っ直ぐな壁が続くようなところで分散が壁方向に拡がってしまうためである。しかし、壁の突き当たりや途中で障害物がある環境では位置の分散を収束させることができる。 前項で説明したパーティクルフィルタでは、初期の姿勢を平均としたガウス分布に従ってパーティクルを生成するため、初期の姿勢が大きく異なる場合は正しい姿勢に収束しない。パーティクルの姿勢を環境地図に一様に分布させることで、位置の初期値を決めることなく位置を推定することができる。図3.12はパーティクル数を10000にして地図全体にパーティクルを一様に分布させることで、自己位置推定を行った時の結果である。各パーティクルの位置を赤い点で示している。図の\ding{192}は走行を開始した直後の様子であり、赤い点が地図全体に広がっている。②でいくつかの候補にパーティクルが集まっていき、③ではほとんど一つの候補に集まっている。④では完全に一つの地点にパーティクルが密集している。この例では④で密集した地点が正しい位置であった。しかし、②のような状態から正しい候補に収束するとは限らない。さらに、パーティクルの数を局所的推定よりはるかに多くしなければならないので、処理に時間がかかる。本研究では、より安定した推定法である局所的推定を用いる。
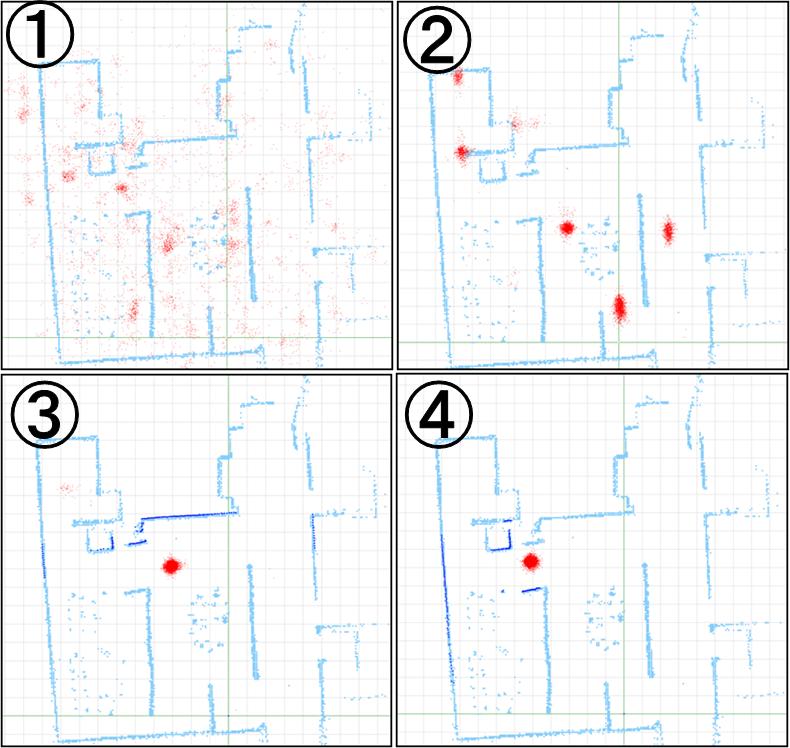
図3.12: 大域的推定の結果
3.2.3 自己位置推定の精度の検証
パーティクルフィルタによる自己位置推定が、オドメトリのみで位置を計算するのと比べて、どの程度正しく位置を推定できているのかを実験によって検証した。ここで検証したいことは、パーティクルフィルタによる自己位置推定を行うことにより現在地情報に誤差が累積することなく、ある一定の誤差内に留まりつづけるかどうかである。実験内容は以下の通りである。
1.出発地点から決まったコース(図3.13)をリモコンによるマニュアル操作で6周する
2.出発地点に目印をつけておき、毎周SUVが目印の位置に来た時点で自己位置推定なしの現在地情報と自己位置推定ありの現在地情報を記録する
3.出発地点と2の現在地情報との距離を調べる。
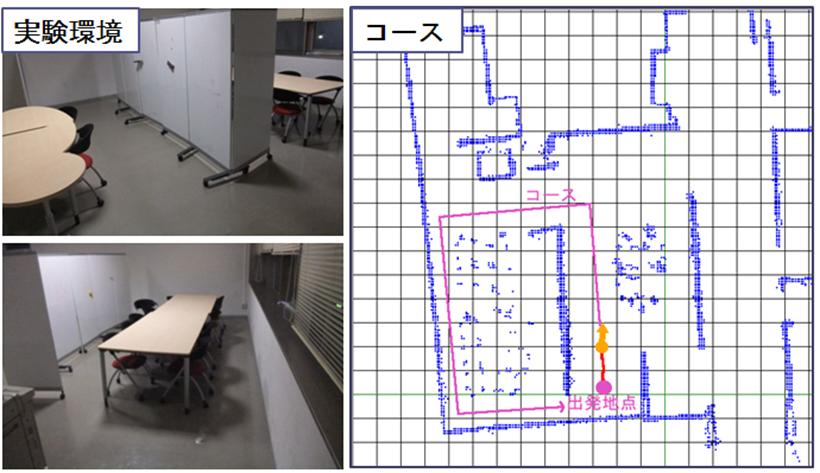
図3.13: 実環境と実験コース
以上の実験を行えば、2の手順で記録される現在地情報と出発地点との距離が0に近づくほど精度よく現在地を認識できていることになる。また、3で計算した距離のグラフと自己位置推定あり、なしでの1周、6周時の軌跡を示す。
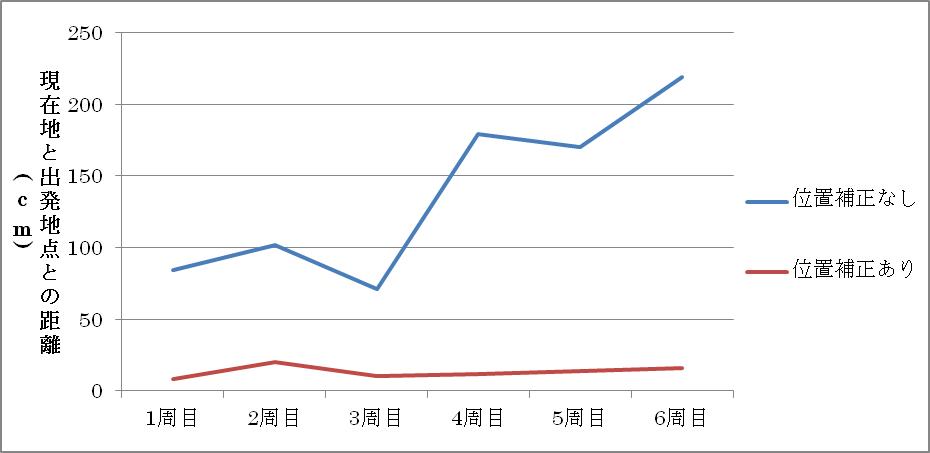
図3.14: 周回後の現在地情報と出発地点との距離

図3.15: 自己位置推定あり・なしの場合のそれぞれの軌跡
図3.14のグラフを見ると、自己位置推定なしのオドメトリ情報のみだと誤差が累積されており、パーティクルフィルタによる自己位置推定ありの結果が1周目から6周目まで一定の誤差範囲内で落ち着いていることがわかる。図3.15の軌跡を見ても自己位置推定なしの場合は誤差の累積のため現在地情報と実世界の現在地の対応が全く取れていないが、自己位置推定ありの方は安定して自己位置推定ができていることが分かる。以上の結果から自己位置推定を行うことにより、現在地の誤差が累積されないことが検証された。
3.3 経路生成
前節で説明したように、ATとSUVは環境地図上で自己位置を一定の誤差内で推定することができる。本節では自己位置から指定された任意の座標に対して走行可能な経路を生成する方法を説明する。
3.3.1 A*アルゴリズムによる経路生成
3.1.4項で説明した環境地図のグラフ構造データから経路を生成する手法を説明する。環境地図の走行可能領域内の任意の場所が目的地として指定された時、現在地と目的地のそれぞれの最近傍のノード間をA*アルゴリズムで探索することで経路を生成する。A*はダイクストラ法による推定値が小さいものから順に探索し、経路が見つかった時点で探索を終了するアルゴリズムである[26]。このアルゴリズムは目的地までの推定値をユークリッド距離とすることで最短経路を探索できることが保証されている。図3.16に生成された経路を示す。なお、環境地図の格子をそのままグラフとしてA*アルゴリズムを適用して経路を生成することは可能である。しかし、環境地図上に存在しない障害物を認識した場合に、より柔軟な経路生成を行うためにグラフ構造を用いる。これについては次項で詳しく説明する。また別の理由として、ATは動的にSUVに経路情報を送信する必要があり、環境地図の格子より粒度の荒い単純なグラフ構造を生成して通信量を減らす必要があるため、環境地図からグラフ構造データを生成する手法を提案する。
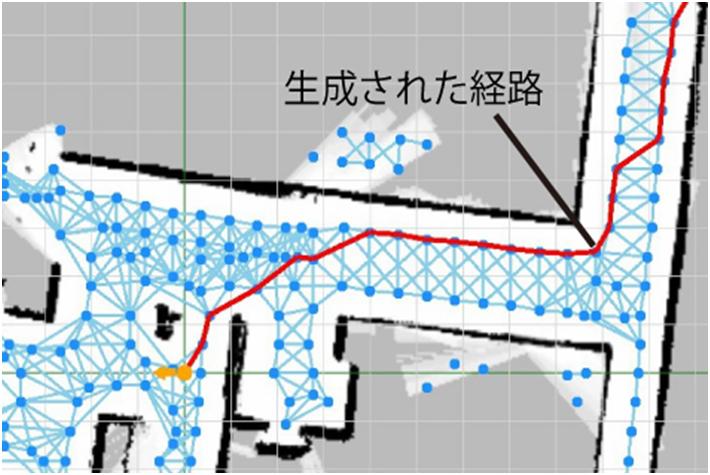
図3.16: 地図に付与されたグラフ構造と生成された経路
3.3.2 地図に含まれない障害物の検出とそれを考慮した経路生成
環境地図中に存在しない障害物、例えば、通路上にダンボール箱などが置かれたりする状況において、移動体はこれを回避する経路を生成する必要がある。これを実現するための3つの機能について説明する。
1.地図にない障害物を検出する機能
占有格子地図とレンジセンサーの値を比較し、レンジセンサーの計測値から占有格子地図上の障害物の最近傍点を求め、最近傍点と計測値のユークリッド距離が閾値以上離れている計測点を地図にない障害物とする。また、ここで検出された地図にない障害物は3で説明する機能によって取り除かれるまで環境内の障害物として保持され続ける。図3.17のピンク色で表される領域が現在のレンジセンサーの値の中で地図にない障害物である。緑の領域が過去に検出した地図にない障害物である。以上の方法で地図にない障害物を検出するが、自己位置推定の精度が悪いときに本来は地図に存在する障害物が誤検出される恐れがある。そこで、自己位置推定の精度を、自己位置推定で用いられるパーティクルフィルタのパーティクルの分散で評価し、分散が十分に小さい場合のみ地図にない障害物を検出する機能を有効にした。図3.18は分散が大きく、自己位置推定の精度が低い例である。赤の点群はパーティクルの位置であり、図3.17の水色の点群に比べ分散が大きいため地図にない障害物の検出を行わない。
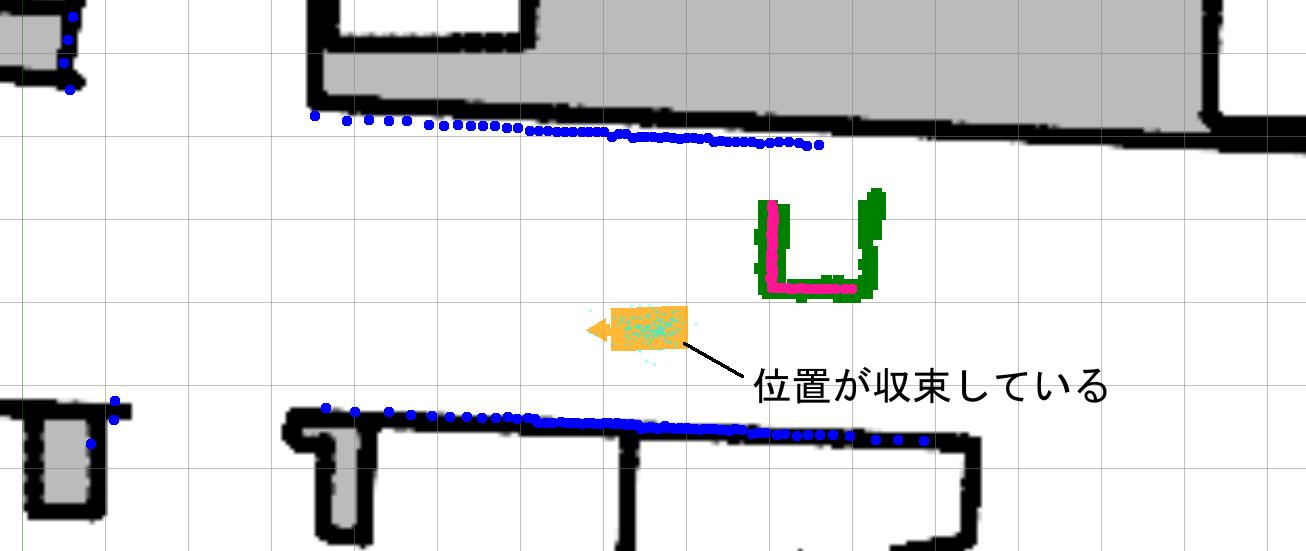
図3.17: 地図にない障害物の検出

図3.18: 分散の大きく位置推定の精度が低いケース
2.地図にない障害物の情報を環境地図に反映して経路生成する機能
1の機能によって地図にない障害物が検出されると、障害物の座標とエッジの線分との距離が閾値以下であるエッジを通行不可能なエッジとする。図3.19の黒い線は通行不可能なエッジを表している。前項で説明した経路生成で通行不可能なエッジを計算に含めないことで、地図にない障害物を避けた経路を生成することが可能となる。

図3.19: 地図にない障害物によるエッジ情報の更新
3.地図にない障害物が取り除かれたときにそれを検出し、環境地図に反映する機能
レンジセンサーは最も近い位置にある障害物までの距離を返すため、検出された位置より短い位置には障害物が存在しない。そのため、計測値までの間に、地図にない障害物が存在する場合、この障害物はすでに存在しないため取り除く。2で通行不可能になったエッジも、そこに関連付けられた地図にない障害物が完全に取り除かれた場合に通行可能になる。また、誤検出を防ぐために1で説明したパーティクルの分布が小さい場合のみ、取り除く機能を有効にした。
3.4 自動走行の制御手法
本節では、前節の仕組みによって生成した経路を実際に走行するために、移動体の駆動部に送信する制御コマンドを決定する方法について説明する。なお、ATとSUVでは駆動部の機構が異なるが、本節では、SUVの駆動部である二輪走行機構での自動走行の制御について説明する。3.4.1項では二輪走行機構のカーブにおける車輪ごとの速度の設定について、3.4.2項では経路に沿った自動走行のためのアルゴリズム、3.4.3項で自動走行の精度の検証結果について説明する。
3.4.1 目標点に対するカーブ走行
2.1節で説明した通り、二輪走行機構は独立で動くサーボモータを左右に持つ。右タイヤと左タイヤの速度を$v_r,v_l$とした時、$v_r = v_l$かつ$v_r> 0 $であれば前進、$v_r = v_l$かつ$v_r< 0 $であれば後退、$v_r = -v_l$であればその場回転となる。その場回転とは、移動体の位置は変わらずに向きだけ変わる動きである。そしてそれ以外の$v_r,v_l$では、図3.20のように移動体は半径の円を描くように平均速度でカーブ走行を行う。$v_r,v_l,r,v$の関係は以下の式の通り。
左カーブの場合 : $\frac{v_r}{v_l} = \frac{r+\frac{\alpha}{2}}{r-\frac{\alpha}{2}} $
右カーブの場合 : $\frac{v_r}{v_l} = \frac{r-\frac{\alpha}{2}}{r+\frac{\alpha}{2}} $
平均速度 : $v = \frac{v_r+ v_l}{2}$
$\alpha$ : 右タイヤと左タイヤの幅
また、ある目標点へ到達するためのカーブ走行の半径$r$は次のように求めることができる。移動体の座標を$(x_1,y_1)$、向きを$\theta _1$、目標点の座標を$(x_2,y_2)$とする。
$d = \sqrt{(x_2-x_1)^{2}+(y_2-y_1)^{2}}$
$\theta = atan2(y_2-y_1,x_2-x_1)- \theta _1$
$r = \frac{d}{2sin|\theta|}$
$※atan2(y,x)は引数yにyの増加分、引数xにxの増加分を入力することで逆正接を4象限表現で返す。atan(a) の範囲が[-\pi/2, \pi/2] であるのに対して、atan2(y,x)は[-\pi, \pi] である$
ただし、$\theta = 0$または$\pi$となる場合は、移動体の向きの直線上に目標点が存在するためカーブ走行はできず、直進または後退を行うことで目標点に到達できる。また、$\theta > 0$の時は左にカーブする場合で、$\theta < 0$の時は右にカーブする場合であり、移動体の平均速度$v$でカーブ走行させるための$v_r,v_l$は前述の式より次のようになる。
左カーブの場合 : $v_r= v + \frac{\alpha}{r} , v_l= v - \frac{\alpha}{r}$
右カーブの場合 : $v_r= v - \frac{\alpha}{r} , v_l= v + \frac{\alpha}{r}$
以上の式で求めた$v_r$, $v_l$で走行するように二輪走行機構に命令を出すことで目標点へ向かう動作が可能である。次項では本項の仕組みを使った自動走行の制御アルゴリズムについて説明する。
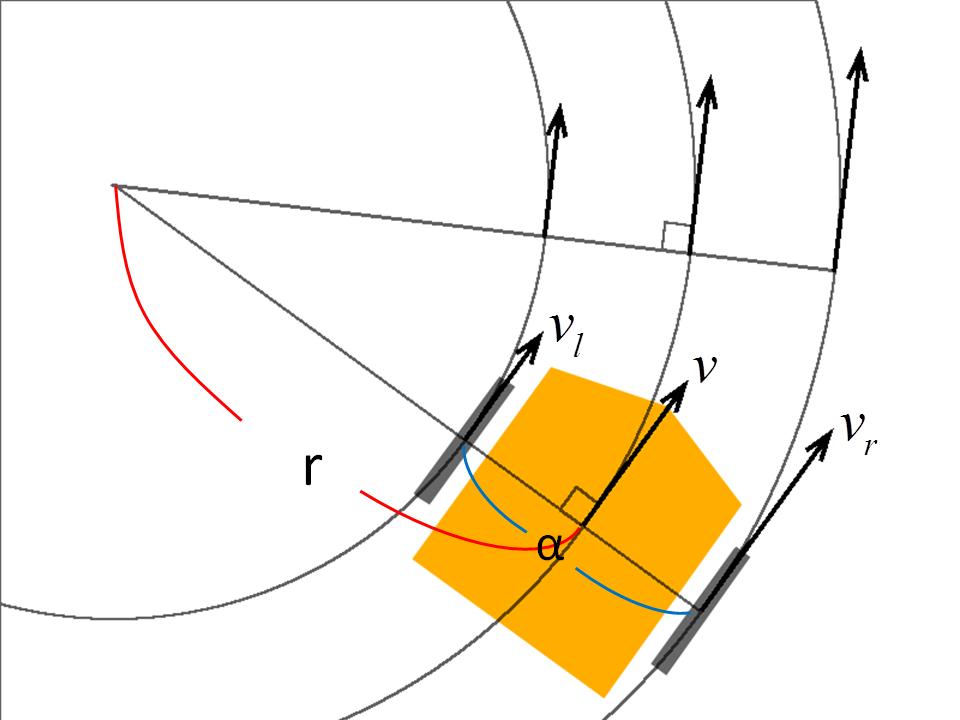
図3.20: 二輪走行機構のカーブ走行
3.4.2 自動走行の制御アルゴリズム
前節で説明した方法で経路が生成され、その経路を走行するためのアルゴリズムを説明する。
1.経路の1番目と2番目のノードを結ぶエッジを現在地エッジとする。移動体の現在地が現在地エッジ上のどの地点か計算する計算方法は現在地から現在地エッジに垂線を下ろした時の交点である。この座標をエッジ上の現在地と呼ぶ。図3.21の水色のノードとエッジは前節の仕組みで生成された経路を表し、橙色が移動体の現在地と向きを表している。この例ではノード間のエッジが現在地エッジであり、紫の点がエッジ上の現在地である。

図3.21: 現在地エッジとエッジ上の現在地
2.エッジ上の現在地から$d_{min}$離れた経路上の点から$d_{max}$離れた点までの間の一定間隔ごとの点群を目標候補点とする。図3.22、図3.23の星マークがその例である。全ての目標候補点に対して、現在地から目標候補点へカーブ走行で向かった場合の軌跡を計算し、進行予定領域内にレンジセンサーで取得した値が含まれるかどうか判定する。図3.22は赤の領域で表される進行予定領域内に、青の点群で表されるレンジセンサーの値が含まれる例である。図3.23は進行予定領域内にレンジセンサーの値が含まれない例である。進行予定領域内にレンジセンサーの値が含まれない目標候補点の中で一番経路上離れた位置にある点を目標点とする。したがって、図3.23の目標候補点を目標点とする。

図3.22: 目標候補点に対するカーブ走行の失敗判定

図3.23: 目標候補点に対するカーブ走行の成功判定
3.全ての目的地候補点で走行可能な点が存在しない場合は、現在地エッジの端点のうち経路上離れた位置にあるノード(図3.21の例で言えばノード$n_2$)の方向へその場回転を行い、手順2に戻る
4.目標点が決まったら、目標地点に対してカーブ走行を行う
5. 一定時間走行する
6.経路の最終目的地に到達したかを確認する到達したら自動走行を終了する。到着してなければ手順7に進む。目的地への到達の判定は、移動体の現在地と目的地の距離が閾値以下になるときとした。
7.現在地エッジの変更の判定は、現在地エッジと次のエッジ(図3.21の例で言えば直線$n_1,n_2$と直線$n_2,n_3$のなす角の二等分線を移動体の現在地が越えたかを計算することによって行う。エッジ上の現在地を計算し、手順2に戻る。
3.4.3 自動走行の精度の検証
本節で説明した仕組みでSUVが正しく自動走行が可能かどうかを実験によって検証した。ここで検証したいことは、壁などの障害物にぶつかることなく自動走行が安定して行えることと、自動走行によって、実際にSUVが到着した場所と設定した目的地の間にどの程度のずれがあるかである。地図を生成した時の出発地点は、常に地図上の原点になる。つまり、出発地点と地図上の原点の対応関係は正確である。地図上の原点を目標地点に設定し、実際にSUVが到着した地点との差を計測することで自動走行の精度を確認した。さらに、自動走行の安定性を確認するために、目標地点に至る経路上に別の目標地点を複数設定し、障害物とぶつかることなくその地点に到着できるかどうかを調べた。以下に実験手順を示す。
1.実環境に目印を付けた地点からSUVを手動操作で走らせ、環境地図を生成した。この実験で作成された地図の走行可能な領域の広さは約11m×9mであった。前述のように、目印を付けた地点は環境地図上での原点と対応している。図3.24のオレンジ色の矢印で表される地点が環境地図の原点である。
2.図3.24の7つの緑の四角のエリアから、ランダムに一ヵ所を選択し、目的地とする。1で目印を付けた地点にSUVを置き、目的地に向かって自動走行させた。自動走行には1で生成した地図を用いた。目的地には60cm×60cmの四角をテープで作ってあり、自動走行が終わった時点で、その四角の領域にSUVが入っているかどうかで、自動走行が適切に行われたかを評価した。SUVの大きさは直径34cmであり、今回の実験での速度は300mm/secである。目的地の領域のサイズについては、環境地図生成と自己位置推定の誤算を考慮して、1辺の長さをSUVの直径の約2倍の60cmとした。
3.自動走行が完了したら、その場所から2と同様の手順で次の目的地を選択し、再び自動走行を開始させた。
4.合計5回の自動走行が行われた後、地図上の原点に向かって自動走行を開始させた。到着後に、1で目印を付けた地点と到着地点のずれを、目的地と実際の到着地点の誤差として記録した。
5.2から4の手順を10回行った。
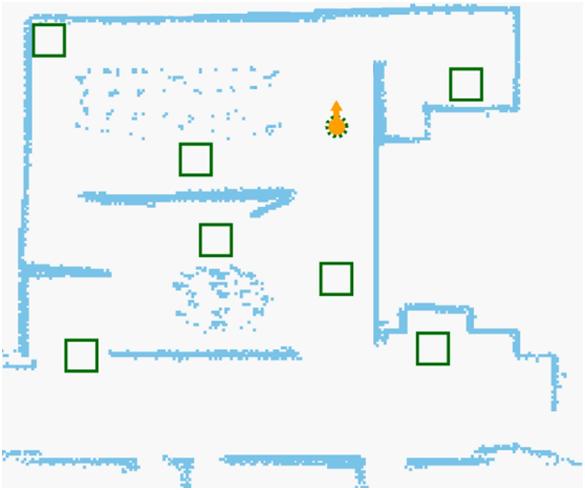
図3.24: 自動走行の目的地候補エリア
実験手順4の目的地と到着地点の誤差の結果を表3.1に示す。環境地図上で設定された目的地に、最大で15.1cm、平均で7.0cmの誤差で到着できることが分かった。この誤差は、目的地へ到着したと判断するのに十分な値だと考えられる。この実験から、SUVが人間の指定した目的地に精度良く到着できることが確認できた。
4 小型無人移動体との連携による個人用知的移動体の安全自動走行
本章では、本研究の提案手法であるSUVをATと連携走行させることでATの自動走行をより安全にする仕組みについて説明する。移動体の自動走行に関する最大の課題は、その移動体が歩行者などの移動障害物に接触・衝突することなく安全に目的地まで到着することである。障害物回避をしながら、自動走行をする移動体に関しては多くの研究が行われているが、移動体の死角から接近する移動障害物との衝突を回避することは困難である。その理由は、移動体に装備されたセンサーで移動障害物を検出してから衝突するまでの時間が非常に短いためである。特に高い安全性が求められる自動走行可能な乗り物にとって、この問題を解決することは必要不可欠である。そこで、SUVを拡張センサーとして用いる手法を提案する。これは、AT が走行する経路上で、死角などがあり特に走行に注意するべき場所を自動で検出し、その場所にSUVがATより先に自律的に移動し、AT の代わりに周囲の状況をセンシングすることで、後続するAT の安全自動走行を実現する手法である。本提案手法の重要な要素として、経路上の注意して走行すべき場所を「注意区間」と呼び、これを検出する仕組みを実現した。注意区間の検出方法・精度については4.1節で説明する。また、SUVのセンサー情報を利用して、ATのセンシング領域を拡張する手法を実現した。これについては4.2節で説明する。また、ATとSUVの移動障害物の検出方法については4.3節で、以上の仕組みを利用した安全自動走行の仕組みについては4.4節で説明する。
4.1 注意区間とその検出
注意区間とは、ある経路上を走行する際に、進行方向前方の視野外から接近する移動障害物と衝突する可能性がある場合、それを回避するために特に注意を払う必要がある、経路上の区間を指す。直感的な説明をすれば、自動車を運転する際に建物などで視野が制限され危険を感じる場所を、徐行して走行する区間とほぼ同義である。本章の冒頭で説明した通り、SUVをATの拡張センサーとして用いてATの安全性を向上させるためには、ATが自動走行する際に通る経路上の注意区間にSUVを先行させ、ATの死角となる領域を前もってセンシングする必要がある。そのため、4.1.1項でこの注意区間を検出する手法を説明する。なお、注意区間を検出する手法は従来研究が存在せず、本研究で新たに提案されたものである。さらに、4.1.2項でその手法の精度を被験者実験によって検証した。
4.1.1 注意区間の検出方法
高速で移動する移動体は低速で移動する移動体に比べてより多くの場所を注意する必要がある。つまり、注意区間はその定義の性質上、移動体の状態・性質によって判断基準が変わってくる。そこで、事前に6名の被験者にATに搭乗してもらい、二つの経路を手動操作で走行する過程において、各自の判断で注意区間を決定してもらう予備実験を行った。その結果を調査して注意区間を分析したところ,次のような傾向が見られた。
1.左右の、初めて視認できる(つまり、移動体がセンシングできる)領域が急増する区間において注意区間が発生する傾向がある。
2.初めてセンシングした領域について、移動体とより近い領域の増加分を重要視する傾向がある。
3.移動体の走行速度によって注意区間を長めに設定する必要がある。
以上を考慮した結果、注意区間の検出手法は次のようになった。ある経路を$N$個の区間に分割し、 $k$番目の区間の開始点を走行するときの姿勢を$a_k=(a_k,y_k,\theta_k)$ とする。$a_k,y_k$は$k$番目の区間の開始点の座標で、$\theta_k$は$(x_k,y_k)$においての経路の接線の角度に等しい。この経路情報と環境地図を入力として、経路上の全ての注意区間を出力とする検出アルゴリズムを図4.1に示す。注意区間は経路上の二点間の区間であり、その二点を出発地点に近い順で並べたもので表される。図4.1の閾値αは、予備実験のデータに基づいて試行錯誤的に決めた。また、図4.1の3秒という数字は、注意区間を走る移動体が、死角から接近する移動体を回避するために十分であると考えられる時間である。

図4.1: 注意区間の検出アルゴリズム
4.1.2 注意区間の検出精度
3.1節で述べた手法で生成された環境地図から、前節で述べた手法により、適切に注意区間が検出できるかを被験者実験によって検証した。注意区間は、ATが自動走行する経路を手動操作で走行したときに、その搭乗者によって判断することは容易であると思われる。そのため、予備実験と同様に、学生3名に協力してもらい、正解となる注意区間を決定した。まず、事前に注意区間の定義について説明し、その上でATが自動走行する複数の経路を手動操作で走行して、注意区間を指定してもらった。次に、被験者に指定したもらった注意区間と環境地図上の領域を対応付けた。そして、それぞれの経路に関して、3名の指定した領域を足し合わせたものを正解データとした。予備実験によって、一つの経路について学生6名の指定した注意区間がほぼ一致したことを確認し、多少の個人差があった場合も3名程度の人間がいれば注意区間を網羅的に抽出するのに十分であると判断したため、正解データを作成するための被験者数を3名とした。また、実験には、複数の注意区間が含まれると考えられる10種類の経路を用いた。経路の長さの平均は約18mである。実験で使用した経路の一つを図4.3に示す。この図の経路を通る際の注意区間の正解データは同じ図に示した4区間であった。この経路において、前節で説明したアルゴリズムで検出した注意区間を図4.4に示す。正解データとの比較において、正解データと検出結果の注意区間の中心のずれが50cm以内である場合を一致として扱った。図4.3と図4.4を比較すると、検出結果の1箇所を除く区間は正解データと一致している。10経路すべてに関して、正解データと検出結果を比較したところ表4.1のような結果になった。誤検出してしまった区間の原因の一つとして、地形情報を占有格子地図で適切に表現できない場所であったことが挙げられる。具体的には、すきまのある上り階段がある場所である。地図上では壁があるように見えるが、実際には見通しが効く場所であったため、誤検出してしまった。地形を平面地図で適切に表現できない場所では、本研究の手法が必ずしも有効に機能しないことは、今後解決すべき課題の一つである。この実験結果から、十分な精度で注意区間を検出できることを確認した。本章の冒頭で説明したように、本研究で検出したい注意区間は、SUVがATの安全のために先回りし、注意して走りながら周辺を探査する区間である。SUVは無人の移動体であるため、注意区間を多めにとって速度を急激に変化させても特に問題はない。また、この場合、適合率(precision)よりも再現率(recall)の方が重要であり、適合率88.8% は許容できると考えられる。
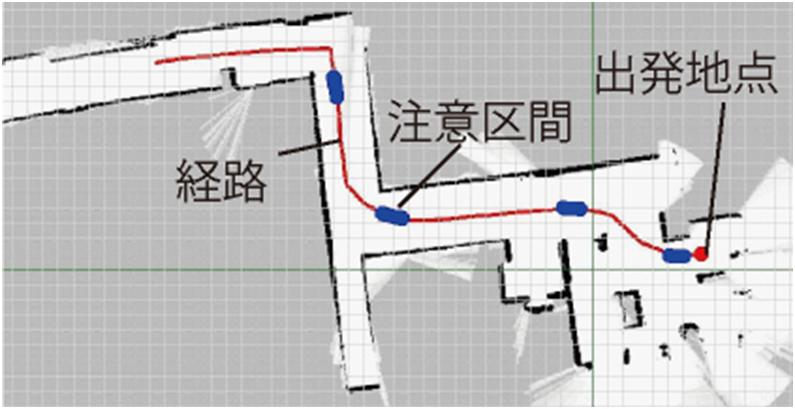
図4.2: 使用した経路とその注意区間
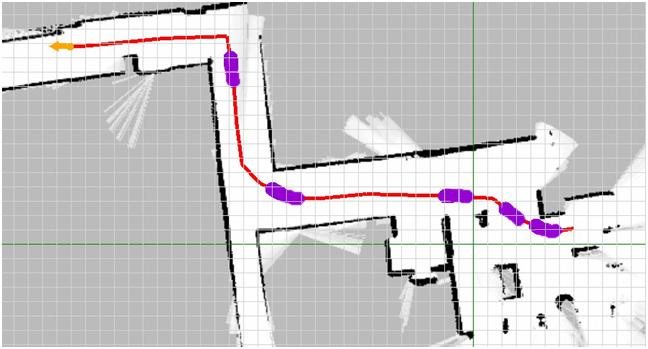
図4.3: 使用した経路とその検出結果
| 正解データの注意区間の総数 | 35 |
| 検出結果の注意区間の総数 | 41 |
| 各経路の適合率の平均 | 88.8% |
| 各経路の再現率の平均 | 100.0% |
4.2 ATとSUVのセンシング領域の統合
SUVによってATが安全に自動走行するためには、まずSUVのセンシング情報をATのセンシング情報と統合する必要がある。この仕組みとして3.1 節で生成した環境地図上で、ATとSUVはそれぞれ自身の現在の位置と向きを3.2節で説明した仕組みで推定し、SUVは現在位置と向きおよびセンシング情報をATに常時送信する。これによりATは、SUVのセンシング情報を自身のセンシング情報と統合することができる。この仕組みによって、統合されたセンシング情報を図4.5に示す。これは、ATのタッチパネルディスプレイで確認することができる情報で、搭乗者は常に、ATとSUVのそれぞれのセンシングした情報(画面では青と赤で色分けしている)を同時にモニターすることができる。図4.5の中央の、「地図にない障害物情報」というラベルが示すセンサー情報は、SUVのみがセンシングした情報である。このように、ATのセンサーの死角になっている領域をセンシングできていることが分かる。

図4.4: SUVによるATのセンシング領域の拡張
4.3 移動障害物の検出
次節で説明する安全自動走行の仕組みにおいて、SUVは移動障害物を検出する機能を持つ必要がある。本節では、移動障害物を検出する仕組みについて説明し、その検出精度について述べる。SUVはレンジセンサーとKinectを同時に用いて移動障害物の検出を行う。レンジセンサーによる障害物検出手法は、センサーの値と地図を比較することで地図にない障害物を一定時間ごとに発見し、この情報からオプティカルフロー[27]を用いることで、動いている障害物を検出するというものである。詳しくは4.3.1項で説明する。一方、Kinectは距離画像に基づいて人間を検出する機能を有しているので、それを用いて、静止しているか動いているかに関わらず人間を検出する。詳しくは4.3.2項で説明する。また、レンジセンサーとKinectによる距離情報を用いて移動障害物の位置を更新し、移動障害物の位置の軌跡からその移動方向を計算する。レンジセンサーは検出距離が長いが、検出した障害物が人間であるかどうかは判別できず、人間の場合はそれが移動を開始して初めて対応できる。一方、Kinectは検出距離が短いが静止している人間も検出できる。このため、レンジセンサーとKinectを併用することで、より確実に移動障害物(特に人間)を検出できる。この仕組みによる移動障害物の検出精度を4.3.3項で説明する。なお、ここでは検出時点で静止している人間も移動障害物と見なしている。
4.3.1 レンジセンサーによる移動障害物の検出
レンジセンサーによって移動障害物を検出する手順は次の通りである。
1.占有格子地図とレンジセンサーの値の差分を抜き出す
3.3.2項で説明した仕組みで占有格子地図にない障害物の情報を抜き出す。図4.6のピンク色で表されるのが地図にない障害物のレンジセンサー情報である。

図4.5: 占有格子地図に存在しないレンジセンサーの値
2.差分から画像を生成する
手順4のオプティカルフローを行うために手順1で抜き出したレンジセンサー情報を画像データに変換する。図4.7左はある時刻での、図4.7右が次の時刻での変換した画像データである。
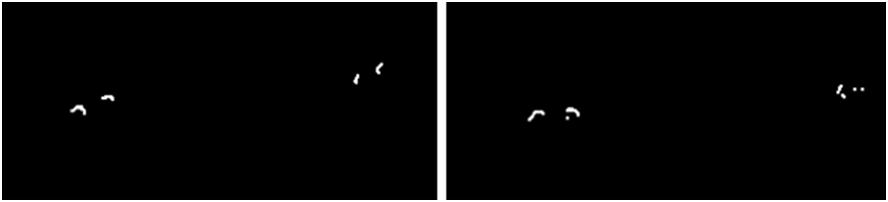
図4.6: 地図にない障害物の抜き出し画像
3.2で作った画像2枚をオプティカルフローで比較することで差分点の対応を求める
図4.7の左と右を重ねあわせたのが図4.8左である。この2つの画像の差分点の対応関係をオプティカルフローによって求める。図4.8右がオプティカルフローの計算結果になる。白色の丸を出発点とし、線の向きと長さで移動の方向と長さを表している。

図4.7: オプティカルフローによる画像差分の対応付け
4.オプティカルフローのベクトルの始点をk-Means法でクラスタリングする
移動障害物ごとの移動ベクトルを計算するためには、図4.8右のオプティカルフローをクラスタリングする必要がある。クラスタリング手法としてはk-means法[S. Z. Selim and M. A. Ismail.: `` K-means-type algorithms," IEEE Trans. Pattern Anal. Mach. Intell., vol.6, no.1, pp.81-87, 1984.]を使用した。図4.9がk-means法でクラスタリングした結果である。ピンク色と赤色で示されるオプティカルフローは、それぞれ別のクラスタ、つまり別の移動障害物として認識された。

図4.8: k-Means法によるベクトルのクラスタリング
5.クラス内の重心ベクトルを求める
図4.9の各色ごとのの重心ベクトルを計算した結果が図4.10である。次のステップでこの重心ベクトルを用いて移動障害物オブジェクトの情報を更新するが、移動障害物オブジェクトとは、環境地図内で存在が確認された移動障害物の位置と存在尤度からなる情報である。

図4.9: 検出された移動障害物の移動ベクトル
6. 全ての重心ベクトルについて、近くにすでに移動障害物オブジェクトがある場合は更新、ない場合は新たに移動障害物オブジェクトを生成する
重心ベクトルの近くにすでに移動障害物オブジェクトが存在する場合は、その移動障害物オブジェクトの存在尤度に一定値加算することで尤度を上げる。また、この時尤度が最大値ならば尤度の更新は行わない。重心ベクトルの近くに移動障害物オブジェクトがない場合は、新たに発見された移動障害物であるため、その重心ベクトルの位置に移動障害物オブジェクトを生成する。図4.11の①の移動障害物オブジェクトがすでに1つ生成されている状態で、図4.11の②の左側のような移動障害物の検出結果になった場合は、図4.11の②の右側のように位置更新とオブジェクトの生成が行われる。
7. 移動障害物オブジェクトの更新がないものについて、移動障害物の存在尤度を下げ、尤度が閾値以下となった移動障害物オブジェクを取り除く
6のステップで移動障害物オブジェクトの更新が行われなかったものに関しては、移動障害物が誤って検出されなかったか、移動障害物がセンシング領域外に出た場合であるため、その移動障害物オブジェクトの存在尤度を下げる。図4.11の②の右側のように移動障害物オブジェクトが2つ生成されている状態で、図4.11の③の左側のような移動障害物の検出結果になった場合は、移動障害物オブジェクト1の存在尤度を下げる。この尤度が閾値以下になった場合、図4.11の③の右側のように移動障害物オブジェクトを削除する。

図4.10: 検出された移動障害物の情報による、移動障害物オブジェクトの更新・生成
4.3.2 深度センサーによる移動障害物の検出
SUVには深度センサーの機能をもつKinectが搭載されており、前項で説明したレンジセンサーによる移動障害物の検出の他に、このデバイスを使って移動障害物を検出する。検出には、Microsoft社より提供されるKinect for Windows SDK[http://www.microsoft.com/en-us/kinectforwindows/]を使用することで、深度センサーから人間を検出する機能を使用した。この機能により、人間の重心の座標を取得できるため、そこから移動障害物の重心ベクトルを求め、その値によって、前項で説明した手順6の移動障害物オブジェクトの更新を行う。以上の仕組みで、レンジセンサーによる移動障害物の検出機能に加えて、深度センサーによる移動障害物検出の機能を追加することができる。実際に深度センサーよって検出された深度情報が図4.12左のグレースケールと緑色で表される情報(より遠い程濃い色、また一番薄い色は不明を表す)で、図4.12左の深度情報のうち、緑色の領域で表わされるのが、Kinectによって検出された人間の領域である。図4.12右はKinectのRGBカメラの情報である。人間が移動することで初めてそれが移動障害物であることを認識できるレンジセンサーと異なり、深度センサーによる検出では、静止している人間を検出することができる。静止している人間を検出するのは、それがいつ動き出すか予測できないので早めに注意を向けるためである。深度センサーによる検出の短所としては、検出距離がレンジセンサーに比べて短いことである。これについては次項の実験で詳しく説明する。また、使用した深度センサーのの視野角は57度と狭いことも短所として挙げられる。しかし、レンジセンサーと深度センサーの移動障害物の検出を併用することで、お互いの長所を活かすことができる。併用した際の検出精度についての検証結果を次項で説明する。
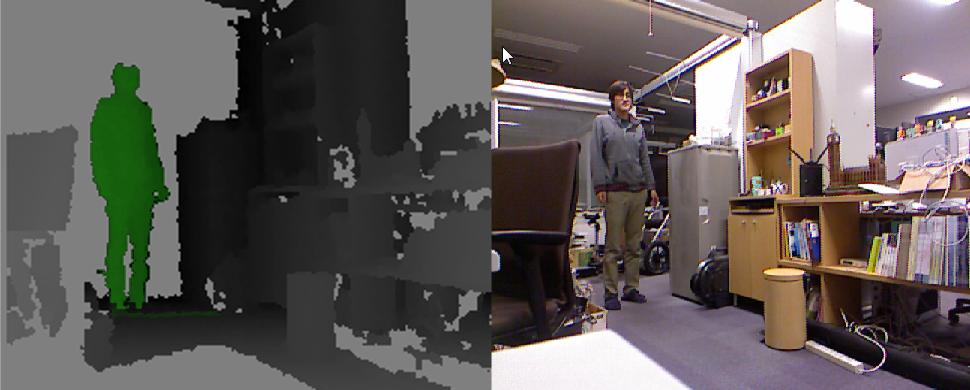
図4.11: Kinectによる移動障害物の検出
4.3.3 移動障害物の検出精度
4.3.1項と4.3.2項の仕組みによる移動障害物の検出精度について述べる。様々な状況下における、レンジセンサーと深度センサーのそれぞれの移動障害物の検出率についての実験結果を表4.2に示す。状況1は、注意区間100箇所において、移動障害物を誤検出した確率である。概ね誤検出をしないことが分かったが、深度センサーが1度誤検出していることが分かる。しかし、深度センサーで移動障害物(人間)が誤検出されても、その位置が変化しない。次節で説明する安全走行の仕組みにおいては、移動障害物の移動方向を考慮するため、位置が変化しない障害物については誤検出されても特に問題はない。状況2と3は、人が移動せずに立っている状況での移動障害物の検出率である。レンジセンサーでは、障害物が動かないため検出率は0% となったが、深度センサーは静止した人をある程度の精度で検出できることが分かった。状況4と5は、人が移動している状況での移動障害物の検出率である。次節で説明する安全走行の仕組みにおいては、人が近づいてくる場合の検出率が重要であり、レンジセンサーと深度センサーのそれぞれで、かなり高い精度で、近づいてくる人を検出できることが分かった。レンジセンサーと深度センサーの移動障害物の検出率から、衝突の危険性を感知することに関してSUVが十分な性能を有していることが確認された。
また、検出精度が高くても移動障害物を検出した位置が近過ぎる場合は、次節で説明する安全自動走行の仕組みにおいて問題があるため、検出時のSUVと移動障害物の距離についても評価を行った。注意区間1箇所において、人が近づいてくる状況で、レンジセンサーと深度センサーのそれぞれの移動障害物検出時の移動障害物とSUVの距離をヒストグラムで示したのが図4.13と図4.14である。それぞれ100回試行した。レンジセンサーと深度センサーの平均検出距離はそれぞれ、7.0m、5.9mであった。図4.13と図4.14のヒストグラムで、ほとんどの検出距離がレンジセンサーは6.5mから7.5m、深度センサーは5.9mから6.2mの区間であるため、どちらもほぼ安定した距離で検出できることが分かる。また、SUVの移動障害物検出は、レンジセンサーと深度センサーのどちらかが先に検出した結果を採用する。そのときの距離をSUVの移動障害物検出距離とすると、今回の実験において、その距離は6.0mであった。これは、人間の歩く速度を1m/secとすれば、歩いて近づいてくる人間と衝突まで6.0秒かかる距離である。今回使用したSUVの最大速度は500mm/secであり、6.0秒で3.0m動けることになる。これより、上記の距離は障害物との衝突を回避するためには十分であると考えられる。
| レンジセンサー | Kinect | |||
| 状況 | 検出率 | 実験回数 | 検出率 | 実験回数 |
| 1.移動障害物なし | 0% | 100箇所×1 | 1% | 100箇所×1回 |
2.人がセンサー側を 向いて静止 | 0% | 3人×4箇所×4回 | 90% | 3人×4箇所×4回 |

図4.12: レンジセンサーによる検出距離
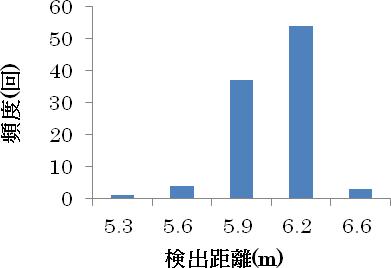
図4.13: Kinectによる検出距離
4.4 連携走行による安全自動走行の仕組み
SUVは4.1節で説明した仕組みで、ATがこれから走行する経路の注意区間を検出することができる。SUVはATの一定間隔離れた位置で自律走行を行い、注意区間の始点に差し掛かったときに速度を落とし、移動障害物の出現に備える。SUVが注意区間で減速している間もATはSUVに近づきすぎるまでは一定速度で走り続ける。SUVは移動障害物を検出せずに注意区間を走り終えると、ATとの間隔を元に戻すために高速で移動する。SUVが注意区間で、接近する移動障害物を確認した場合、SUVは経路を逆に進むことで移動障害物と衝突しない位置に回避し、移動障害物が通りすぎるのを待つ。同時にATにも移動障害物を検出したことを伝える。図4.15はATとの連携走行中にSUVが注意区間を発見し、その場所で減速している様子と、そのときのATのコンソール画面を示している。SUVはATの死角を補完する位置で減速し、その位置から移動障害物の情報を送るため、ATが移動障害物の発見の遅れによって、それと衝突することは回避される。注意区間で減速したSUVは十分な精度で、接近する移動障害物を検出する必要があるが、前項の実験から検出精度は十分に高く、また検出時に障害物との間にそれを回避するのに十分な距離が存在することが分かった。 図4.16は、図4.15で示した注意区間でSUVが移動障害物を検出した時のKinectのカメラおよび深度センサーの画像と、検出結果を表すSUVのコンソール画面を示している。ここでは、移動障害物(人間)の位置を表すピクトグラムを地図上に表示している。SUVを用いたATの安全な自動走行の仕組みは、ATから見えない(つまりATのセンサーで検知できない)領域から接近する移動障害物を早めに検出し、ぶつからないように減速するという動作を行いながら目的地に移動するというものである。単純ではあるが、移動障害物同士の衝突の多くはお互いがお互いを認識することなく移動し続けた場合に発生する。SUVを用いたこの仕組みは、移動障害物の発見を早め、ATは移動を停止することができるため、衝突の危険性を大幅に低減させることができると考えられる。ところで、SUVが行う回避行動、つまり注意区間で減速し、移動障害物を見つけたときに後退して回避する動作をAT自身が行えば、死角から接近する障害物との衝突を回避し安全に走行することが原理的には可能である。しかし、ATのような人間が乗る乗り物が見通しの悪い注意区間の全てにおいて一旦減速し、移動障害物を見つけたときに急速度で回避する動作を行うことは搭乗者の乗り心地を著しく悪化させる。さらに、ATが注意区間で減速すれば、目的地に到着するまでの時間が遅れ、自動走行の効率が下ると考えられる。これについては、5.4節の実験で詳細に述べる。自動走行は人間が普通に歩くよりも安心して移動できる仕組みを実現する必要があるため、経路上の危険な領域をSUVが事前に探索する本研究の仕組みは有効であると考えられる。また、1.2節で説明した、環境に設置するセンサーを今回の注意区間が発生しやすいような場所に置く方法も、死角からの移動障害物の認識は可能だと思われる。しかし、注意区間が発生するような場所は一般的な屋内には多数あり、網羅的に環境設置型センサーを置くことはコストの面で難しく、提案手法の方が有効であると考えられる。ここで提案したATの安全自動走行の仕組みの妥当性は、要素技術の精度によってある程度示すことが可能である。例えば、ATとSUVの位置推定の精度は3.2節で示した通りであり、自律走行の精度は3.4節、注意区間検出の精度は4.1節、移動障害物の検出精度は4.3節で示した通りである。センシング領域の拡張と連携自動走行は、要素技術の組み合わせで実現されるため、それら要素技術の精度が十分であれば、十分な精度で実行できる。これより、SUVを用いたATの安全自動走行は妥当な手法であると思われる。さらに次章で、シミュレータを用いることで、提案手法によってどの程度安全性が向上するのかを詳細に検証する。
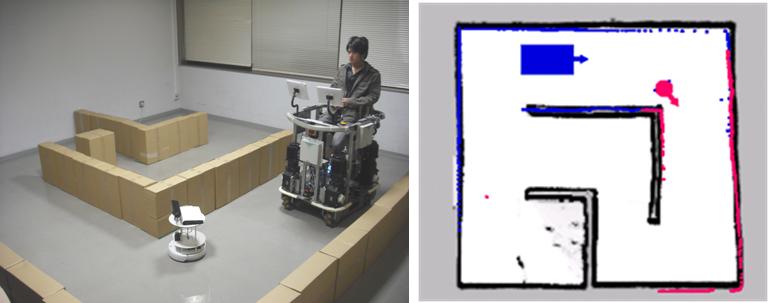
図4.14: 注意区間で停止するSUVとその時のATのコンソール画面
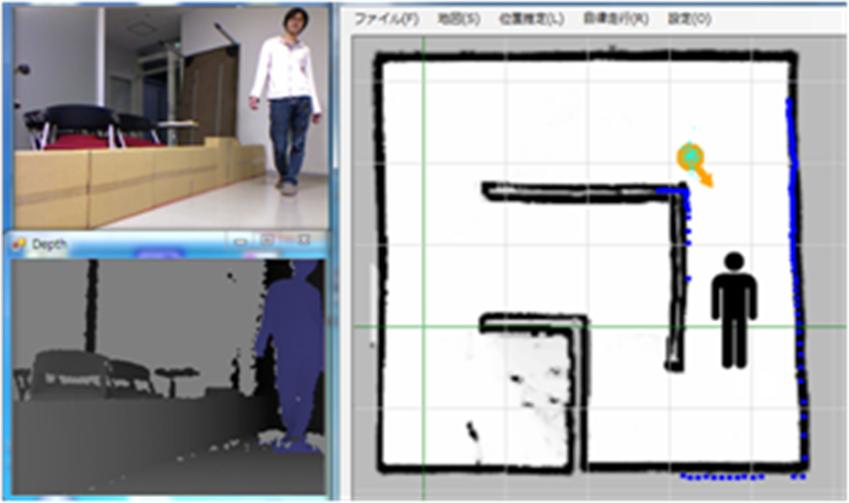
図4.15: SUVによる移動障害物の認識
5 シミュレーションによる実験と評価
本章では、提案手法であるSUVとATの連携走行によってATの自動走行の安全性を向上させる仕組みの評価を行う。評価する内容は、移動障害物が自由に動きまわる屋内の環境で、ATがその移動障害物と衝突することなく目的地まで到着できるかどうかと、本研究で提案した注意区間が安全走行のために効果がどの程度あるのかである。また、SUVとの連携走行によってATの自動走行の効率を妨げることがないかも評価すべき点である。これらを評価するためには、実験環境と移動障害物の数と実験回数をある程度以上に大規模にする必要であると考えられる。必要とされる規模については以下の通りである。
実験環境:死角からの移動障害物の回避を目的とするため、死角が多く存在する環境が望ましい。そのためある程度の広さが必要である。また、提案手法が一般の屋内で有効かどうかを検証するためには、実在する屋内で、かつ複数の人が歩き回る環境であるのが望ましい。具体的には、ショッピングモールや美術館などのような環境である。
移動障害物:環境中に存在する移動障害物の数が多いほど、ATの衝突の可能性が高くなり、提案手法の評価には好都合である。例えば、環境中に移動障害物が1人いる状況に比べて、100人いる状況では、衝突の可能性は100倍となる。
実験回数:ATが目的地に対して自動走行中に、死角から接近する移動障害物と衝突しそうになる状況が何度も起きる程度の回数を設定する必要がある。そのような状況が発生する頻度を考えれば、ATが目的地に対して自動走行するという行動を数万回程度繰り返せることが望ましい。
以上のような規模を実環境で実験するのは困難であったため、本研究の評価ではシミュレータを作成し評価を行った。このシミュレータについては次節で詳しく説明する。
また、この実験によって検証したい仮説は以下の3つである。
- ATはSUVと連携走行することにより、移動障害物の認識が早まり、危険な状況(移動障害物と衝突しそうな状況)を回避することができる
- 移動障害物と衝突しそうな状況は注意区間付近で起こりやすい
- ATはSUVと連携走行することにより、安全かつ効率的に移動できる
以上の仮説を検証することにより、提案手法による安全性の向上を確認する。仮説1、2、3はそれぞれ5.2節、5.3節、5.4節の実験で検証する。
5.1 実験に使用するシミュレーション
3章で説明した通り、ATとSUVの自動走行のための制御プログラムでは、環境地図中の位置をレンジセンサーの値から推定し、経路を走行するために移動体の二輪走行機構に制御用のコマンドを送信する。実験で使用するシミュレータは、レーザーレンジセンサーと二輪走行機構を三次元の仮想世界でシミュレーションすることで実現した。シミュレータの概要を図5.1に示す。ATとSUVの制御用のプログラムへの入力情報であるレンジセンサーデータ、出力情報である二輪走行機構への制御コマンドをシミュレータに置き換えることで、ATとSUVの現実世界での挙動をシミュレーションすることができる。また、シミュレーション中の移動障害物とATとSUVの位置と向きは全てログとして保存される。このログを分析することで、ATやSUVに危険な状況が発生した頻度などを調べることができる。また、保存されたログから任意の時間の状況をシミュレータ内で再現できる機能を実現した。この機能によって、どのような状況で衝突しやすいかなどを詳しく分析できる。次項からは、シミュレータ内の環境、移動障害物・AT・SUVの挙動について説明する。
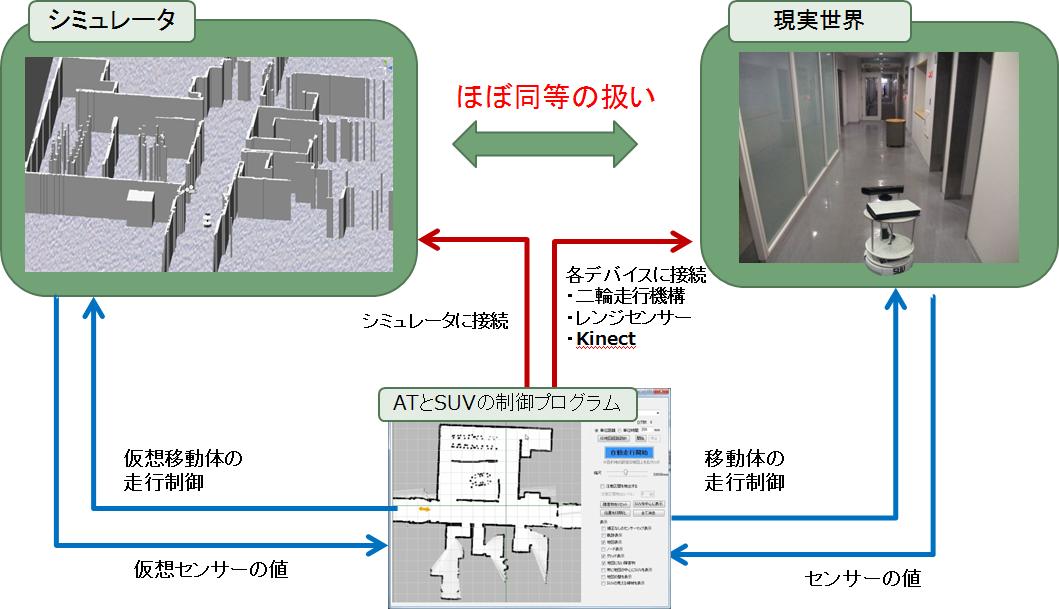
図5.1: シミュレータの概要
5.1.1 実験に使用する環境
シミュレータ内の環境について説明する。シミュレータ内で実験に使用する環境は、実在する屋内の環境地図の障害物部分を抜き出し、2mの高さの壁としてシミュレータ内の3次元空間に再現したものである。図5.2に生成された3次元の環境の例を示す。作成した環境と現実での環境の主な差異を以下に挙げる。
1. 地面の段差は存在しない
2. ドアは存在しない
3. 存在する静止障害物は全て視線を覆い隠す程度の高さである
4.環境中に存在する移動体はAT×1、SUV×0-1、そして移動障害物(人間)×100のみ
4の移動障害物の数は100人としたが、これはPCの処理性能によって決めた数である。5章の冒頭で説明した通り、移動障害物の数は多いほど都合が良いが、実験回数を増やすことで実験の規模を拡大できるためPCの処理性能によって人数を決めた。また5.2節、5.3節、5.4節の実験で使用する環境は、50m×50m以上であることを実験で使用する環境の規模の指標として設定した。図5.3が実験で使用した8個の環境地図である。なお、使用した環境地図はインターネットで一般公開しているもの\footnote{http://cres.usc.edu/radishrepository/view-all.php}を使用した。
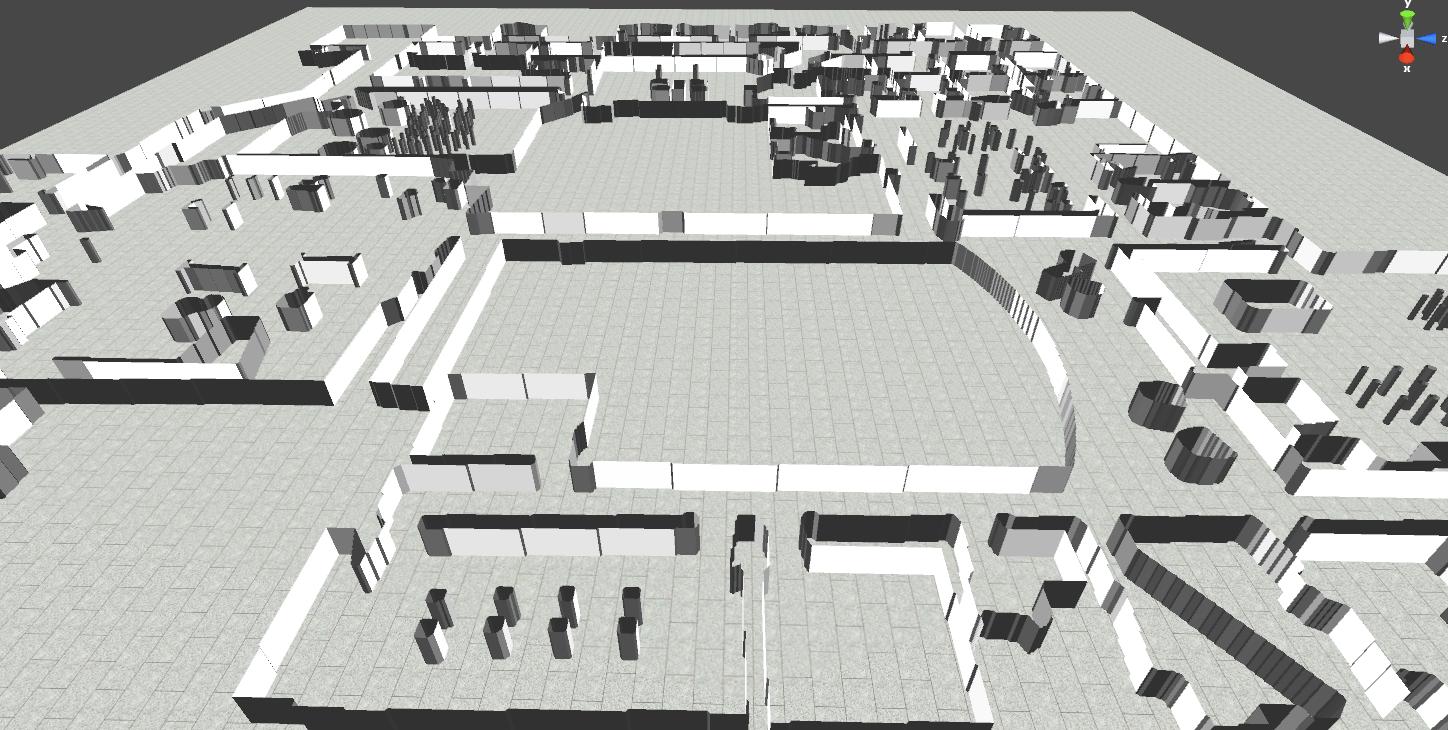
図5.2: 生成された3次元の環境
図5.3: 実験に使用する環境地図
5.1.2 使用した環境地図の一般性
前項で、使用する実験環境について説明したが、実験に使用する環境は8個であり、この8個の環境で提案手法が有効であると検証された場合、一般的な屋内環境のほぼ全てにおいて提案手法が有効であるかどうかを検証した。具体的には実験に使用する8個の環境と、Google Maps\footnote{http://maps.google.co.jp/}上に屋内地図を表示するGoogleのIndoor Mapサービスによって取得した100個の屋内地図の地形的特徴を比較することで、実験に使用する8個の環境地図の一般性を調べた。提案手法が有効に働く状況は主に視野不明瞭による移動障害物と衝突する可能性が高い地点である。図5.4に具体例を示す。各状況で同じ色の2つの矢印が交わる地点が危険な地点である。このような地点が環境中にどのくらいの頻度で存在するかを地形的特徴量としてその分布を調査した。実験で使用する環境地図8個とGoogle Mapsから抜き出した100個の屋内地図の危険な地点の総数を手動で数え、通路の長さの合計をその地図の規模とすることで、次の式によって危険に関する地形的特徴量を求めた。
危険に関する地形的特徴量 = 危険な地点の総数 / 通路の長さの合計
それぞれの環境ごとに地形的特徴量を計算した結果が図5.5である。図の2つの分布図から実験で使用する環境地図は一般的な屋内地図の地形的特徴量の分布と類似していることが分かる。したがって、実験で使用する環境地図において提案手法が有効であると検証されれば、任意の一般的な屋内環境で提案手法が有効であると考えられる。
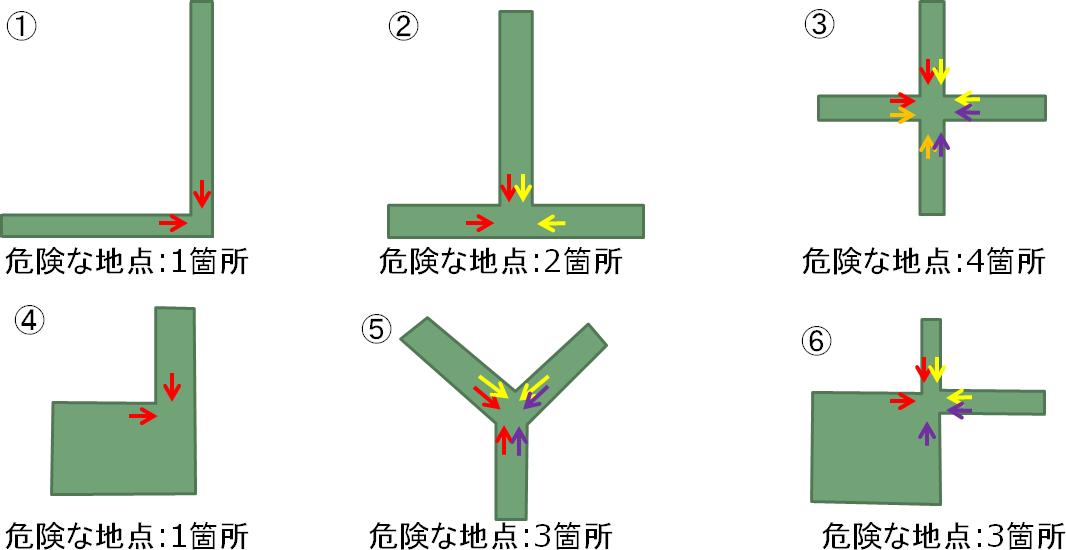
図5.4: 危険な地点の例

図5.5: 実験で用いる環境地図とGoogle Mapsから取得した地図の危険に関する地形的特徴量の分布
5.1.3 移動障害物
シミュレータに存在する移動障害物は次の挙動をシミュレータ内で繰り返す。
- 目的地がランダムに決まり、その目的地までの最短経路を歩き続ける
- 経路を歩き終えたら、次の目的地がランダムに決まる
- 人間の視線は常に進行方向を向き続ける
- 歩く速度は秒速1.2m(時速4.3km)
- ATやSUVを認識するのは視野のカメラにATやSUVが映ったとき
- 移動障害物は他の移動障害物・AT・SUVと衝突しても衝突の影響を受けずに歩き続ける
- 移動障害物は他の移動障害物を認識しない
- 移動障害物は他の移動障害物によって視界が遮られた場合でもその先の移動体を認識できる
1で歩く経路は3.3節で説明したATとSUVと同じA*アルゴリズムで生成される。5については、図5.6で示すように移動障害物の頭部を頭頂点とする四角錐の領域内の移動体を認識する。なお、壁の向こうの移動体は認識することができない。6については、移動障害物は一切の回避行動をとらないため、衝突による影響を考慮しない。7と8については、ある移動障害物から他の移動障害物は一切認識していない状況を想定しているため、このような挙動にした。1と2の通り、移動障害物は目的地までの最短経路上を歩く挙動しかしないが、現実には人ごみを歩く人は周りの人間と自分の目的地を考慮して歩く経路を決める。これをシミュレータ上で再現することは困難であったため、シミュレータでは複数の移動障害物が及ぼす影響については考慮していない。しかし、実際には環境中に人が多く存在する環境である程、移動体に危険な状況が発生しやすいため、この状況を再現して、提案手法を評価するのは今後の課題である。
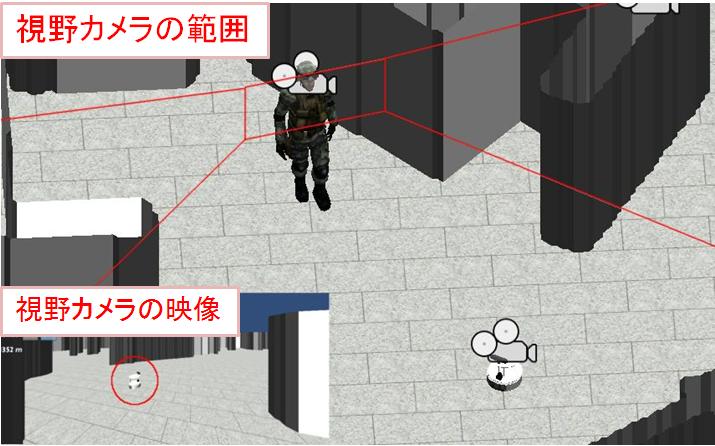
図5.6: 移動障害物の視野カメラによるATとSUVの認識
5.1.4 ATとSUV
シミュレータに存在するATとSUVは次の挙動をシミュレータ内で繰り返す。
・共通
1.ATとSUVのレンジセンサの計測範囲は360度
2.移動体を認識するのはレンジセンサのレーザーの一定本数以上が移動体に到達し、かつ移動体までの距離が15m以内の場合
3.レンジセンサは移動体の奥にいる別の移動体も計測できる
・AT単独走行時
4.ATは目的地がランダムに決まり、その目的地までの最短経路を走行する
5.ATは目的地に到着したら、次の目的地がランダムに決まる
・SUV連携走行時
6.SUVは目的地がランダムに決まり、その目的地までの最短経路を走行する
7.SUVは目的地に到着したら、次の目的地がランダムに決まる
8.ATはSUVの設定された間隔を開けて走行する
9.SUVが注意区間を走行する際は、自動走行の半分の速度で走行する
10.SUVが注意区間で減速中もATは設定された速度で走るが、SUVとの距離が1m以下になったときはSUVと近過ぎないように減速して走行する
11.SUVが注意区間を抜けるとATとの距離を設定された間隔になるまで速度を上げる
12.SUVが認識したものはATも認識したものとみなす。また、ATが認識したものはSUVも認識したものとみなす。
1と2については2章で説明したATとSUVに搭載されているレーザーレンジセンサーと同じ分解能と認識距離を設定し、レンジセンサーのレーザーが5本以上移動障害物と交わるとき移動体を認識するとした。図5.7はATとSUVが実際に移動障害物を認識しているときの様子を示している。図の放射状に広がる赤い線は、シミュレータ内のレンジセンサーを可視化したものである。3は5.1.3項で説明した通り、今回のシミュレータ実験では複数の移動障害物が及ぼす影響については考慮しないため、ある移動障害物によってその向こうの移動障害物が見えない状況でもどちらの移動障害物も認識可能とした。8に関して、ATとSUVの間の距離は実験に基づいて決定した。5.4節では、この距離を変化させたときの安全性について評価実験を行い、最適なパラメータについて考察した。
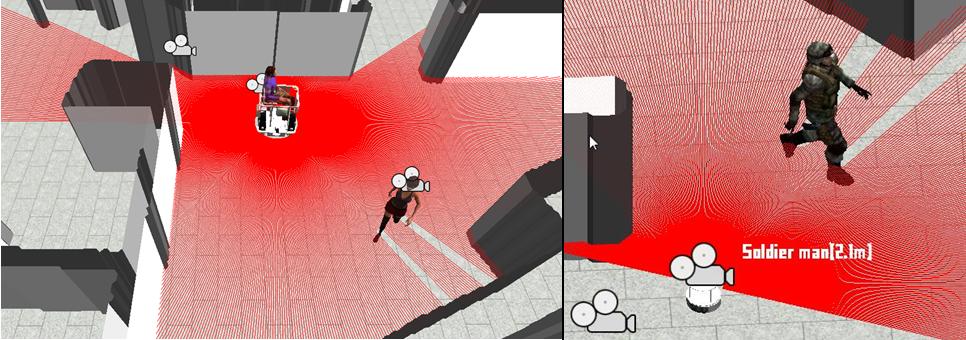
図5.7: ATとSUVのレンジセンサよる移動障害物の認識
5.1.5 本実験で定義される用語
5.2節、5.3節、5.4節の実験の説明および評価で使用されるシミュレータ内での4つの用語について説明する。
認識:
5.1.3項で説明した通り、移動障害物は自身の視野にATやSUVが含まれている場合にそれらを認識する。5.1.4項で説明した通り、ATとSUVは自身のレンジセンサーで移動障害物を捕捉した場合に移動障害物を認識する。また、ATとSUVのいずれかが認識した移動障害物はもう一方も認識したものとみなす。図5.8の①と③はATが移動障害物を認識した瞬間の例である。
非回避衝突:
シミュレータではどの移動体も回避行動をとらないため、離れた位置で認識しても、経路が交叉する場合は衝突する。そのため、現実での衝突とシミュレータ内の衝突では意味が異なり、シミュレータ内での衝突を非回避衝突と呼ぶ。また、移動体間で非回避衝突が起きても、非回避衝突による物理的影響は受けず、移動体同士はすり抜けて移動を続ける。図5.8の②と④はATと移動障害物が非回避衝突した瞬間の例である。④は認識と非回避衝突までの時間が離れているため、現実には④のように衝突は起こらないが、シミュレータ内では都合上回避行動をとらないため衝突する。
衝突時間間隔:
ATがある移動障害物を認識した時刻を$t_1$、ATとその移動障害物が非回避衝突する時刻を$t_2$としたとき、$t_2-t_1$を衝突時間間隔と定義する。衝突時間間隔は回避行動を一切とらない場合の、認識から衝突するまでの時間であるため、衝突時間間隔が十分に小さい時、ATは回避行動をとるための時間がなく移動障害物と衝突する危険性が高いと考えられる。図5.8の左側は衝突時間間隔が小さい例、右側は衝突時間間隔が大きい例である。この図から分かるように衝突時間間隔が小さいほど衝突の危険性が高く、この値を本章の実験の評価値とする。
回避困難衝突:
衝突時間間隔が閾値以下の状況を、ATが回避困難であるとし、その状況を回避困難衝突と定義する。ATは全方位移動ができるため、移動障害物の移動方向に対して垂直方向に回避できる。移動障害物とATの幅を考慮すれば、移動障害物の進行方向の垂直方向に1m移動すれば回避できると考えられる。ATの速度0.5m/secで回避するとして2秒、回避開始と終了の動作準備時間を1秒とし、3秒あれば移動障害物を回避できると考えられる。この3秒を回避困難衝突の閾値とした。本研究の目的をこの言葉を使って言い換えるならば、SUVと連携走行することで回避困難衝突が発生する確率を0% にするのが目的であると言える。図5.8の左側は回避困難衝突の例である。
次節からの実験では、以上の用語を用いて実験について説明する。
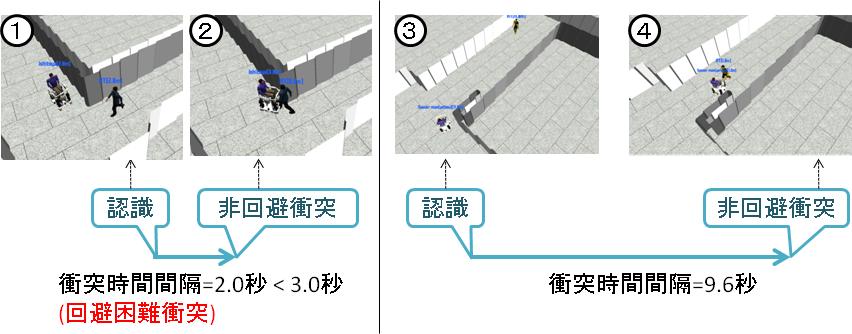
図5.8: 衝突時間間隔と回避困難衝突
5.2 安全性に関する評価実験
本節では、本章の冒頭で説明した「ATはSUVと連携走行することにより、移動障害物の認識が早め、危険な状況(移動障害物と衝突しそうな状況)を回避することができる」という仮説を検証するための評価実験を行う。これを評価するためには、SUVと連携走行するときとそうでないときの衝突時間間隔を評価すればよい。次節から実験内容について説明する。
5.2.1 実験内容
5.1.1項で説明した実験環境8箇所で、SUVの連携走行がある場合とない場合のシミュレーション実験を行った。移動障害物・AT・SUVの挙動は5.1.3項と5.1.4項で説明した通り、ランダムに設定した目的地に対して移動し続ける。終了条件は、ATと移動障害物が2000回、非回避衝突した時とした。ATとSUVの自動走行の速度は0.8m/sec、連携走行の間隔を6mとした。以上の条件で、終了条件に達するまでシミュレーションを行い、そのログから衝突時間間隔の分布を実験環境ごとに調べた。
5.2.2 結果
実験結果を図5.9に示す。実験環境ごとに衝突時間間隔をヒストグラムで示している。各環境ごとのヒストグラム内で青のヒストグラムはATの単独走行時の結果、赤のヒストグラムはSUVとの連携走行時の結果を表している。また表5.1に実験環境ごとのAT単独走行時とSUV連携走行時の衝突時間間隔の平均値と、全ての非回避衝突中の回避困難衝突の発生率を示す。図5.9のそれぞれの環境ごとにAT単独走行とSUV連携走行のヒストグラムの形状が似ており、SUV連携走行時のヒストグラムがAT単独走行時のヒストグラムに比べて右にずれていることが分かる。また、表5.1よりAT単独走行時の衝突時間間隔の平均値が4.9秒、SUV連携走行時の平均値が8.2秒であった。このことから、SUVと連携走行することによってATは移動障害物の認識を平均して3.3秒早めることができたと言える。また、回避困難衝突の発生率はAT単独走行時では平均26.8% であったが、SUVと連携走行時は1.6%まで下がった。以上の結果より、「ATはSUVと連携走行することにより、移動障害物の認識が早め、危険な状況(移動障害物と衝突しそうな状況)を回避することができる」という仮説を検証した。また、表5.1の場所D、E、GでSUVと連携走行時に回避困難衝突の発生率が高い。この原因については次項の考察で述べる。
| 場所 | A | B | C | D | E | F | G | H | 平均 | |
| AT単独走行 | 平均値(秒) | 4.9 | 4.9 | 5.1 | 5.0 | 5.0 | 4.8 | 4.8 | 4.9 | 4.9 |
回避困難衝突 発生率(%) | 22.4 | 28.2 | 25.2 | 26.7 | 28.2 | 28.7 | 31.1 | 23.6 | 26.8 | |
SUV 連携走行 | 平均値(秒) | 8.3 | 8.2 | 8.5 | 8.0 | 8.2 | 8.1 | 8.0 | 8.1 | 8.2 |
回避困難衝突 発生率(%) | 0.1 | 0.7 | 1.1 | 3.2 | 2.6 | 1.2 | 3.1 | 0.8 | 1.6 |
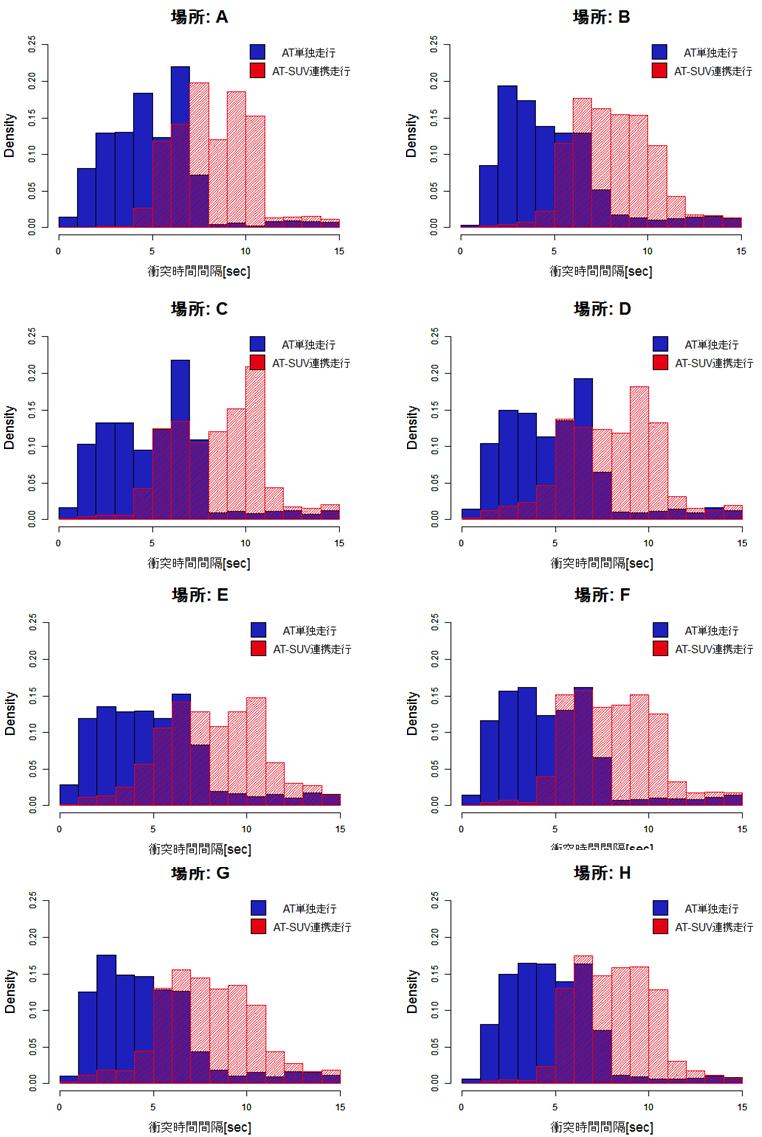
図5.9: SUVありとなしでの衝突時間間隔のヒストグラム
5.2.3 考察
前項の実験結果よりSUVと連携走行することによりATの移動障害物の認識が平均3.3秒早まることが分かった。しかし、SUVと連携走行時にも衝突時間間隔が短くなる状況があり、特に環境D、E、Gではそれが顕著となった。連携走行あり・なしそれぞれについて衝突時間間隔が短い状況をログから再現することで分析を行った。AT単独走行時に衝突時間間隔が短くなるケースとしては、図5.10に表すような死角から接近する移動障害物と非回避衝突するケースがほとんどであった。しかし、SUVと連携走行時に衝突時間間隔が短くなるケースでは、このような状況はほとんど発生しなかった。これは、ATの前方の死角から接近する移動障害物をSUVによって検出する本研究の手法が有効に働いたためだと考えられる。しかし、SUVと連携走行時では、次の2パターンのケースにおいて衝突時間間隔が短くなる状況が発生した。
1.ATとSUVが目的地に着き、SUVが次の目的地に向かって動いているが、ATはSUVとの距離が設定された間隔以下であるため停止している際に、死角から接近する移動障害物と非回避衝突するケース
2.図5.12のようにATとSUVの間に存在する死角から接近する移動障害物がATと衝突するケース
1の例を図5.11に示す。この時ATはSUVとの距離が近いため停止しており、後方の死角から接近する障害物と非回避衝突した。しかし、このようなケースは衝突時間間隔が短いがATが停止しているため衝突の危険性は比較的低いと考えられる。また、ATが死角の存在する付近で停止することを防ぐような動作をすることによって改善することができると考えられる。2の例を図5.12に示す。ATとSUVの間隔が広くなるほどこの状況の発生頻度が増えると考えられるが、間隔が狭すぎるとSUVの連携走行によって得られる人の認識を早める効果が低くなる。この実験に使用したATとSUVの間隔は5.4節の実験によって得られた結果によって6mとしたが、環境D、E、Gで連携走行時の結果が悪くなったのは図5.12のような状況が起きやすい場所が多く存在するためである。具体的には、通路の脇に部屋が複数存在する環境などでは連携走行による効果が低くなると考えられる。今後の課題として、このような場所を検出する方法を考案し、検出した場所を通るときは連携走行の間隔を狭めて通過するなどの改善が必要であると考えられる。

図5.10: AT単独走行時の衝突時間間隔が短かった例
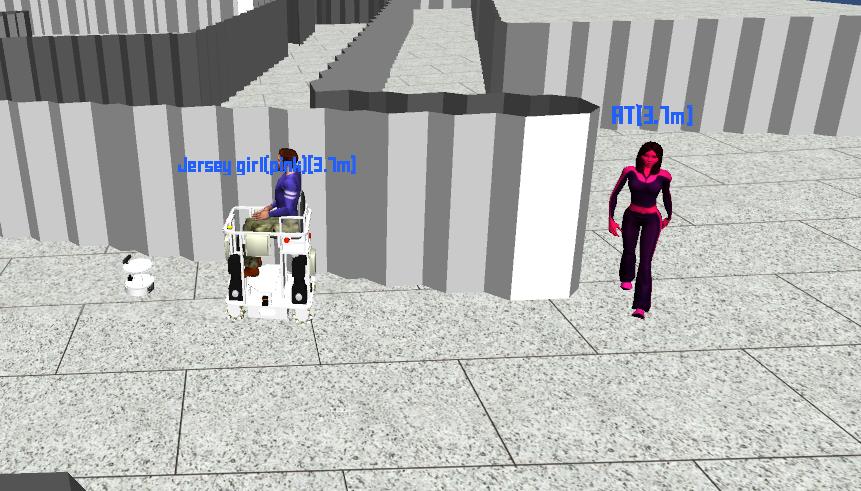
図5.11: SUVと連携走行時の衝突時間間隔が短かった例1
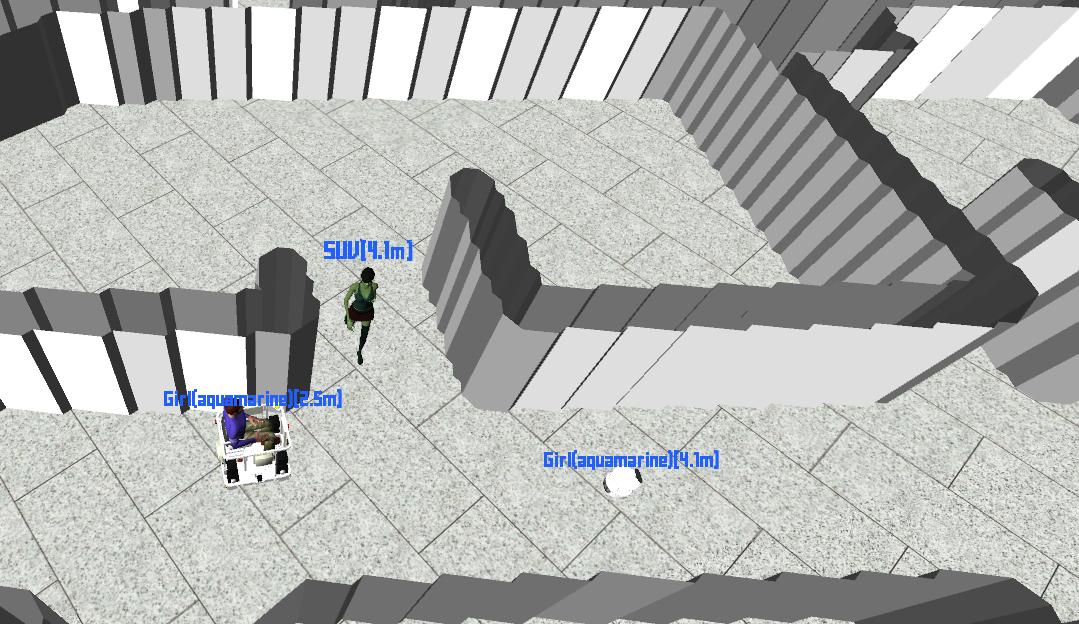
図5.12: SUVと連携走行時の衝突時間間隔が短かった例2
5.3 注意区間に関する評価実験
本節では、本章の冒頭で説明した「移動障害物と衝突しそうな状況は注意区間付近で起こりやすい」という仮説を検証するための評価実験を行う。4.1節で説明した通り、注意区間は、視野外から接近する移動障害物を回避するために特に注意を払う必要がある区間である。そのことから、注意区間を考慮せずに一定の速度で走行して回避困難衝突が発生した場合、衝突した障害物の認識は注意区間内で起こるはずだと考えられる。直感的な説明をすれば、見通しの悪い交差点を車が徐行せずに走行した場合、視野外から接近する車と衝突する可能性があり、そのとき、衝突した相手の認識は徐行区間で起こっているはずである。さらに本研究では、注意区間をSUVがATの代わりに注意して走行すれば回避困難衝突は起きないという仮説に基づいている。以上のことから、回避困難衝突における移動障害物の認識のほとんどは注意区間の中で起きるはずであると考えられる。これをシミュレーション実験によって検証する。次項から実験内容について説明する。
5.3.1 実験内容
5.1.1項で説明した実験環境8箇所で、ATを注意区間で減速することなく単独で走行させた。 ATの速度は0.8m/secとした。移動障害物およびATの挙動は5.1.3項と5.1.4項で説明した通り、ランダムに設定した目的地に対して移動し続ける。終了条件は、ATと移動障害物が2000回非回避衝突した時とした。以上の条件で、終了条件に達するまでシミュレーションを行い、そのログから回避困難衝突が起きた際に、ATによる移動障害物の認識が注意区間内で発生したのかどうかを確認した。
5.3.2 結果
実験結果を図5.13に示す。全ての回避困難衝突の内、どの程度が注意区間内で発生したのかを環境ごとに表したグラフである。平均91.0% 、最小値86.0% という結果になった。また、表5.2は、ランダムな出発地点と目的地点で100通りの経路を生成したときに、経路の中にどの程度注意区間が含まれていたか(これを注意区間率と呼ぶ)を表している。環境によってばらつきがあるが、経路には平均14.5% の注意区間が含まれることが分かる。以上の結果より、「移動障害物と衝突しそうな状況は注意区間付近で起こりやすい」という仮説が検証された。次項では注意区間外で発生した回避困難衝突についてログを分析した考察を述べる。
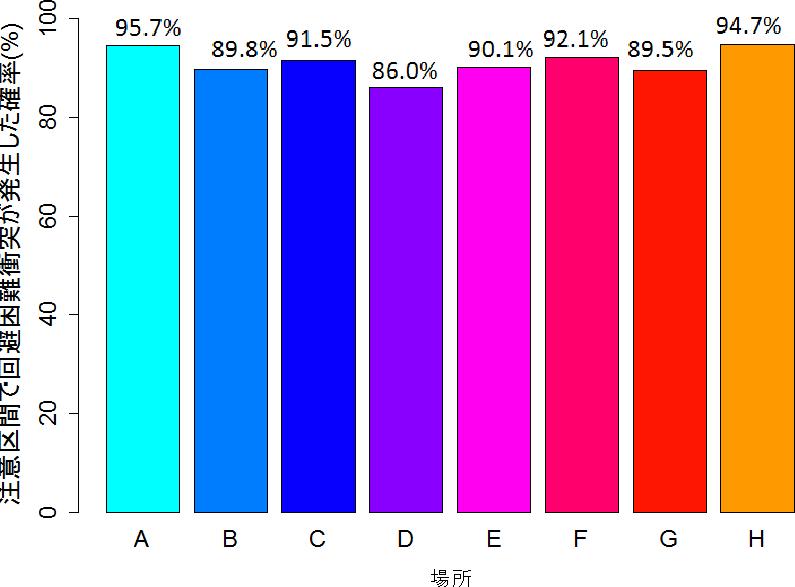
図5.13: 注意区間で発生した回避困難衝突の割合
| 場所 | A | B | C | D | E | F | G | H | 平均 |
| 注意区間率 | 5.4% | 18.5% | 10.6% | 12.5% | 22.8% | 11.8% | 16.9% | 17.2% | 14.5% |
5.3.3 考察
前項の結果より、経路に含まれる15% 程度の注意区間内で、回避困難衝突の90% 程度が発生していることが分かった。残りの10% 程度がどのような場所で発生しているかをログから分析した結果、次のような場所で発生していることが分かった。
1.移動障害物の認識が注意区間の手前で発生し、その後注意区間に入って非回避衝突が発生するケース
2.本来は注意区間として認識されるはずだが、検出されなかったケース
図5.14が1のケースの例である。白の線はATの経路であり、紫の領域は注意区間である。図5.14左はATが移動障害物を認識した瞬間で、図5.14右が非回避衝突した瞬間である。4.1.1項の図4.1の手順7では、注意区間の始点を移動体が3秒間で走行する距離分伸ばしている。この実験ではATは0.8m/secで走行するため2.4m伸ばしており、この距離を変えれば、1のケースの例は少なくなると考えられる。しかし、表5.2で示している経路中の注意区間率が上がり、経路内の多くの部分が注意区間となる。現在の連携走行のアルゴリズムは注意区間内を低速で走るため、経路中の注意区間率が上がれば自動走行の平均速度が下がってしまう。注意区間内の動作を改良し、注意区間を伸ばしても自動走行の平均速度が下がらないようにするのが今後の課題の一つである。2について、図5.15が注意区間として検出されなかった回避困難衝突の例である。しかし、実際にはこの場所は死角があるため注意区間として検出されるべき場所である。4.1.1項で説明したとおり、注意区間は経路上で初めて視認できる(つまり、移動体がセンシングできる)領域が急増する区間を検出するため、図5.16の青色の領域のようにセンシング領域する増加するエリアが小さい場合は検出されない。4.4.1項の検出方法の閾値αを下げることで、この区間は注意区間として検出されるが、注意区間の誤検出が増え、経路中の注意区間率が増えてしまう。注意区間の検出アルゴリズムを改良することで、このような状況を注意区間として検出できるようにすることも今後の課題である。
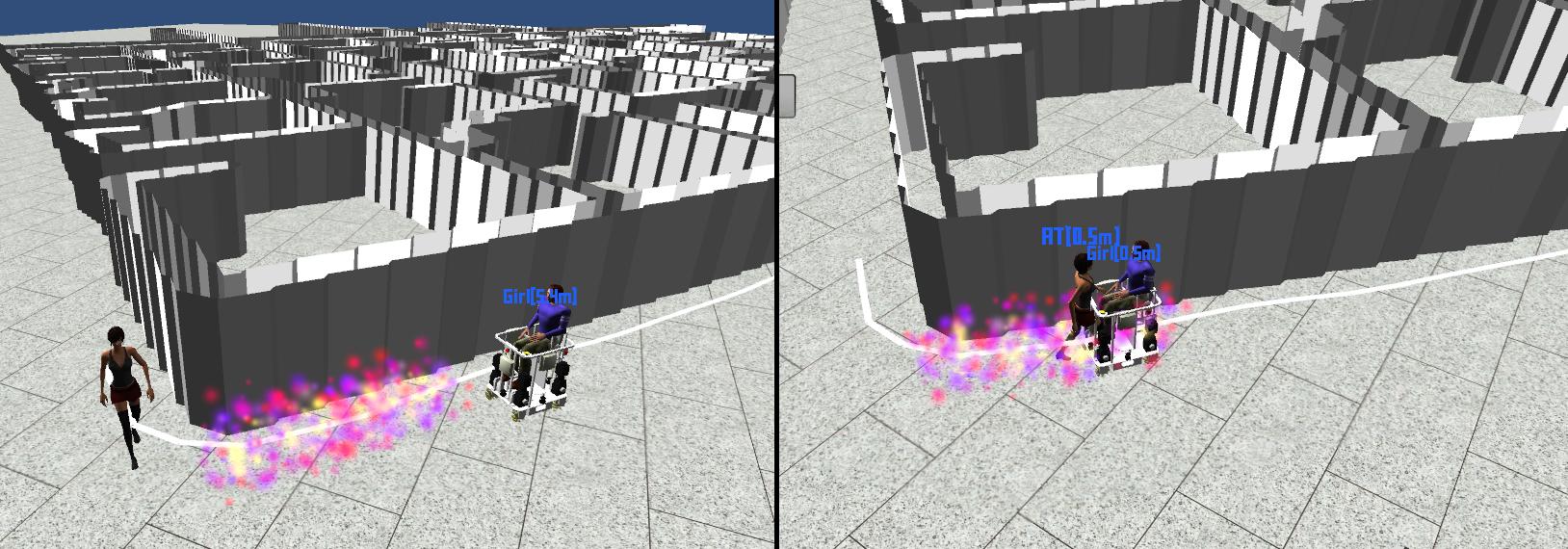
図5.14: 注意区間外で認識し、注意区間内で衝突する例
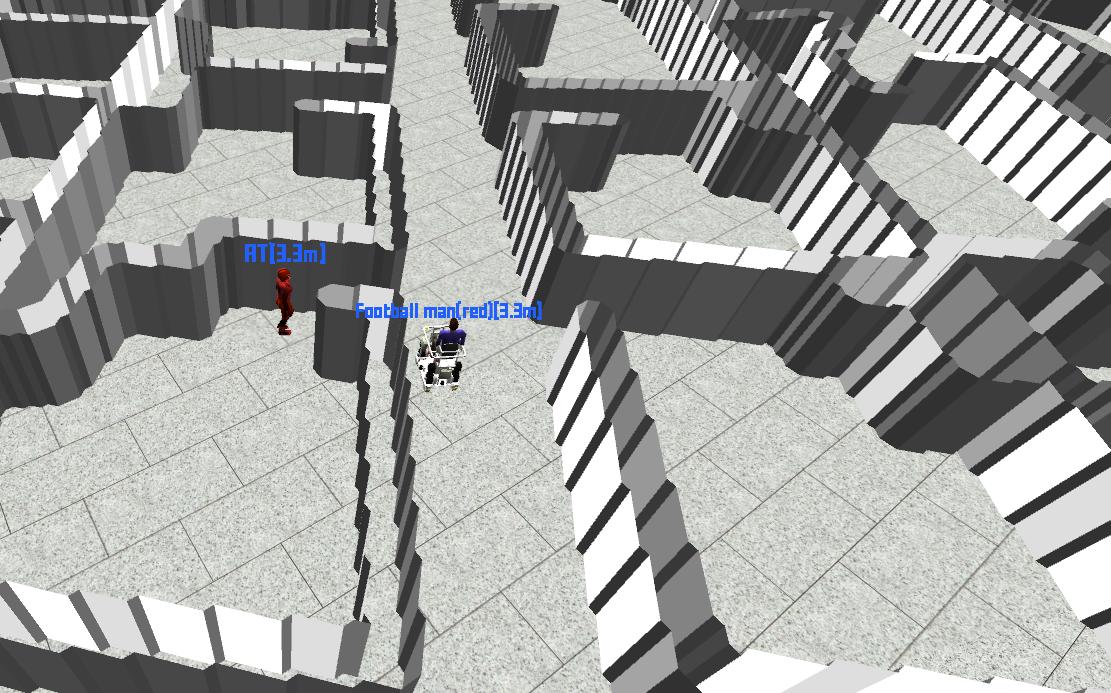
図5.15: 注意区間外で認識した回避困難衝突した例

図5.16: 注意区間が検出されなかった例
5.4 連携走行の安全性と効率に関する評価実験
本節では、本章の冒頭で説明した「ATはSUVを使って安全かつ効率的に移動できる」という仮説を検証するための評価実験を行う。ATが単独で走るときにどのくらいの頻度で回避困難衝突が発生し、SUVと連携走行時にはこれがどう変化するのかを評価することによって安全性を評価した。また、5.1.4項で説明した通り、SUVと連携走行時にATは設定した速度で走行し続けるが、注意区間でSUVが減速した時に、ATがSUVに近づきすぎた場合は速度を落として走行する。ATに設定した速度と、実際の平均速度を計算することで自動走行の効率を調べる。また、仮説とは直接関係ないが、自動走行の速度とATとSUV間の間隔による変化を調べ、適切な速度と間隔について考察する。次項で実験内容について説明する。
5.4.1 実験内容
SUVの連携走行がある場合とない場合、さらにSUVとATの間隔を変えてシミュレーション実験を行った。実験は次の5通り行った。
1.ATが単独走行で走り、注意区間を考慮せず一定速度で走行
2.ATが単独走行で走り、注意区間では半分の速度で走行
3.SUVとATが連携走行を行い、SUVとATの間隔は3m
4.SUVとATが連携走行を行い、SUVとATの間隔は6m
5.SUVとATが連携走行を行い、SUVとATの間隔は9m
各項目ごとに自動走行の速度を0.5m/secから1.4m/secまで0.1m/sec間隔で行った。それぞれの速度における終了条件はATと移動障害物が2000回非回避衝突した時とした。移動障害物、AT、SUVの挙動は5.1.3項、5.1.4項で説明した通りランダムな目的地に対して移動し続ける。実験環境は図5.3のFの環境で実験した。これはFの環境が5.1.2項で説明した地形的特徴量が、使用した8個の環境地図の中で中央値であったためである。以上の条件でシミュレーションを行い、そのログから全ての非回避衝突中の回避困難衝突の発生率を調べた。また、ATがシミュレーション中に移動した距離とシミュレーションを行った時間から計算した速度を自動走行の平均速度とし、この速度と設定した速度を以下の式で計算することで自動走行の効率を調べた。
自動走行の効率 = 自動走行の平均速度 / 自動走行に設定した速度
この自動走行の効率は、設定された速度で走り続ければ100% となるが、自動走行中に減速するほど効率は低下する。
5.4.2 結果
図5.17に実験結果として0.5m/secから1.4m/secごとの回避困難衝突の発生率を示している。①の注意区間なしのAT単独走行より、②の注意区間ありのAT単独走行が全ての速度に関して回避困難衝突の発生率が低いことから、SUVなしでも注意区間を低速に走行することでATの自動走行の安全性を上げられることが分かる。さらに、②の結果に比べ、③-⑤の結果が全ての速度に関して回避困難衝突の発生率が大幅に低いことから、SUVの連携走行はATの自動走行の安全性を大きくあげることが分かる。③-⑤の結果ではSUVの連携走行時のATとSUVの間隔を変えた結果であるが、速度が0.8m/secより遅い速度ではATとSUVの間隔が狭い程良い結果となっている。また、0.8m/secより速い速度では、間隔が一番短い3mのケースが一番悪く、続いて9m、6mの順で結果が良くなった。このことから、速度が遅い時は間隔が長いと安全性が下がり、速度が高い時は間隔が短すぎても長すぎても安全性が下がることが分かる。これらの原因や、速度による適切な間隔については次項で述べる。図5.18は0.5m/secから1.4m/secごとの前節で説明した自動走行の効率を示している。①の注意区間なしのAT単独走行は常に一定速度で走り続けるため自動走行の効率は100% である。②の注意区間ありのAT単独走行では、注意区間の度に減速するため、平均して効率が83.0% まで下がった。③-⑤の連携走行で間隔3m、6m、9mのケースの効率は、それぞれ89.4% 、96.9% 、99.1% という結果になった。以上の結果の違いの原因については次項で述べる。図5.17の実験結果から、SUVと連携走行することにより、ATは単独で走行するより安全に自動走行ができることが分かった。また、図5.18の実験結果から、SUVと連携走行する時のATの自動走行の効率は、ATが単独で一定速度で走る時と比べて、ほとんど低下しないことが分かった。以上より、「ATはSUVを使って安全かつ効率的に移動できる」という仮説が検証された。
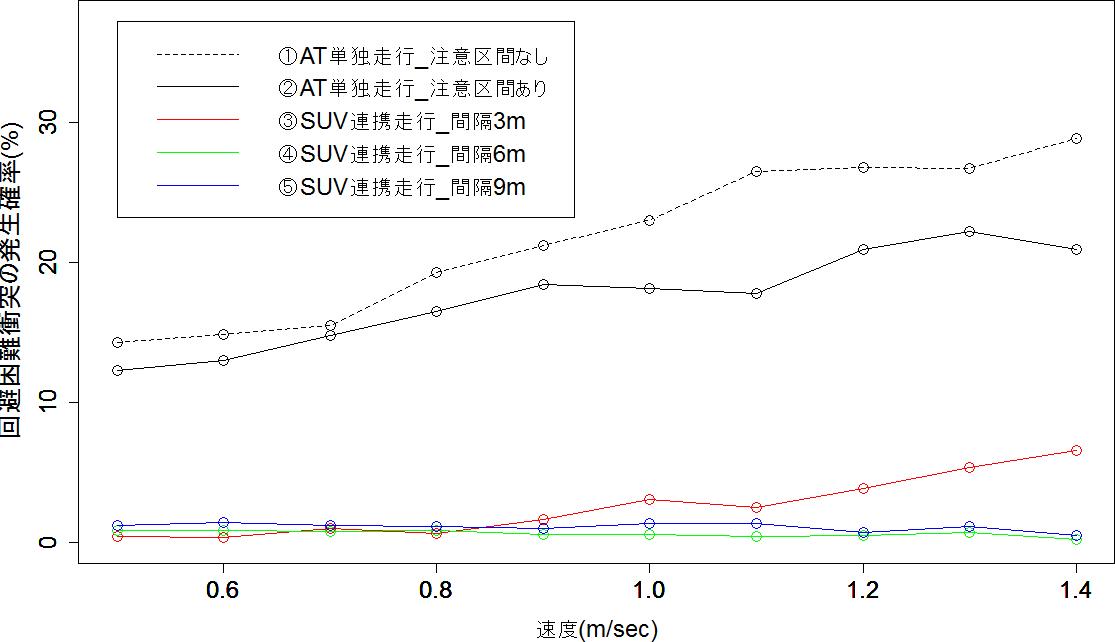
図5.17: 回避困難衝突の発生頻度と速度の関係
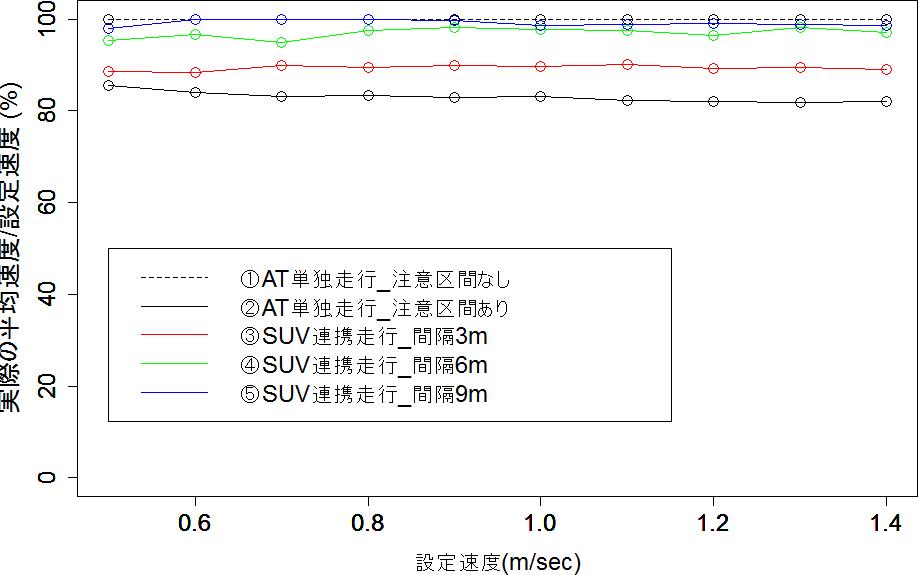
図5.18: 自動走行の効率
5.4.3 考察
実験結果より、AT単独で注意区間を低速に走ることによっても回避困難衝突を減らすことが可能であるが、SUVの連携走行することにより、回避困難衝突の発生率を大幅に下げることができ、より効率的な自動走行ができることが分かった。この実験ではATとSUVの間隔を3m、6m、9mに設定して、それぞれの間隔で速度を変えて実験を行ったが、以下では適切な速度と間隔の関係について考察する。図5.17のグラフで、0.5m/secから0.7m/secに間隔が広い程結果が悪くなっているのは、5.2.3項で述べたATとSUVの間の死角から移動障害物が現れた場合に衝突時間間隔が短くなってしまう問題が発生する頻度が高まるためだと考えられる。また、0.9m/sec以上、間隔が3mの結果において、速度が上がるにつれて悪くなっているのは、移動速度が速いため連携走行による衝突時間間隔の増加が少なくなるためである。図5.9のヒストグラムで言えば、自動走行の速度を上げることにより、AT単独走行時とSUV連携走行時のヒストグラムのずれが少なくなり、回避困難衝突の閾値である3秒を下回るケースが増えたと考えられる。各速度における適切な間隔は、回避困難衝突の発生率が一番低くなる値である。図5.17より、0.5m/secから0.7m/secでは間隔3m 、0.8m/secから1.1m/secでは間隔6mである。1.2m/secから1.4m/secでは、間隔6mと9mでほぼ同等の結果であるが、上で述べた間隔が広くなったときの問題点を考慮すれば間隔6mが適切であると考えられる。また、自動走行の速度が1.4m/secより大きくなった場合は、間隔が6mでも間隔3mの時と同様に回避困難衝突の発生率が高くなると予想されるため、間隔を広げる必要がある。図5.18のグラフで②の注意区間ありのAT単独走行で、自動走行の効率が下がったのは、注意区間で減速するためであると考えられる。また、③の間隔3mの連携走行でも効率が下がっているのは、間隔が短すぎるため、経路中に連続して注意区間が現れる場合に、ATがSUVに接近しすぎて速度が下がるケースが多く発生したためだと考える。④、⑤の間隔が6m、9mのケースでは全ての速度で効率が100% に近い値である。これは、SUVが注意区間で減速しても、間隔が十分開いているため、ATは一定速度で走り続けているためだと考えられる。
6 関連研究
本研究では、小型無人移動体を個人用知的移動体の外部拡張センサーとしてセンシング領域を拡張することによって、安全な自動走行を実現することを目的としている。本章では、関連研究として、6.1節では音情報で死角から接近する移動障害物を認識する研究、6.2節では車載カメラ画像処理を用いて安全な自動走行を目指す研究、6.3節では死角から接近する移動障害物を歩行者に直感的に知らせる研究、6.4節では見通し不良区間における安全走行の支援を行う研究について紹介し、それぞれについて本研究との違いと優位性について述べる。
6.1 音情報で死角から接近する移動障害物の認識に関する研究
本研究では、死角から接近する移動障害物を移動体のセンサー自身で取得できないため、SUVがATの前を走ることでセンシング領域を拡張する手法を提案したが、渡部らは死角から接近する障害物の音情報を使って検出する手法を提案している[8]。具体的には、移動体に複数のマイクロホンを搭載し、それぞれのマイクの音圧差を利用して移動体の接近を検出する。マイクロホンの音圧差は、音源が近い程強くなることから、音源(つまり足音)が一定の大きさであると仮定すれば、音圧差の時間変化の関係より移動障害物の接近を感知することができる。また、死角から接近する移動障害物の音圧差の時間変化は、音が直接届かないため、誤差は大きくなるが、直接音が届く場合の音圧差の時間変化と同じような特性が得られるため、検出可能である。しかし、音源からの距離が3m以上である場合、音圧差の時間変化の特性曲線に対し、誤差が大きいため、移動障害物が近づいているか遠ざかっているかの認識精度が悪くなる。また、死角から接近する移動障害物は、直接音が届く場合に比べて精度が悪い。この研究の手法は、衝突回避のための情報としては精度が十分であるとは言えない。さらに、環境によってはノイズで誤検出や未検出が発生することが考えられる。しかし、通常のセンサーでは知ることができない死角の移動障害物を検出するという意味では、本研究と目的が共通する仕組みである。今後センサーの選択・改良によって、死角からの移動障害物を十分な精度で検出できるような仕組みが考案されれば、ATにそのセンサーを搭載し、SUVによる本研究の提案手法と比較実験をする必要があると考えられる。
6.2 車載カメラ画像処理を用いた安全な自動走行に関する研究
見通しの悪い交差点などで自動車の交通事故をなくすために、交差点付近の車両の位置情報を含む交差点の鳥瞰図を作成する研究を、太田らが行っている[28]。仮想鳥瞰図を運転者が見ることによって、運転者は安全に交差点を走ることができる。手法としては、交差点の地図情報を既知の情報とし、各車両の車載カメラの映像を画像処理することで車両の向きと位置を推定し、その位置情報と地図を統合することで鳥瞰図を作成する。画像処理による位置推定の方法は、ハフ変換により道路のエッジを抜き出し、これを特徴量として車体の向きを推定する手法を用いている。また、カメラの透視投影画像を地平平面に投影した画像に変換し、地図と比べることで、地図上の位置を推定する。この研究では、道路とカメラの特性を活かし、カメラ映像の画像処理のみによって位置推定する仕組みを実現している。GPSの精度は十数メートル程度の誤差であることに対して、この研究の手法での誤差は1m程度である。この研究のように、運転者に交差点付近の他の車両の位置情報を知らせるための精度としては十分だが、自動走行する移動体の現在地の精度としては不十分である。また、本研究では交差点付近にATが一台、人間が一人の条件を設定しているが、複数の移動体と人間が混在する環境では、この研究のように複数の移動体の位置情報を統合して利用する必要がある。
6.3 死角から接近する移動障害物を歩行者に直感的に知らせる装置に関する研究
横山らの研究では、死角から接近する移動障害物を無機ELシートに表示することによって、歩行者に知らせる研究を行っている[7]。なお、無機ELシートとは、有機ELに比べ安価で薄いのが特徴の発光シートである。無機ELシートを通路の曲がり角の一方の通路に貼り付け、そこにもう一方の通路から接近する移動障害物の位置を映し出すことで、移動障害物の接近を視覚的に認識することができる。無機ELシートには、シートが貼られていない通路の移動障害物の接近感を強調する表示がされるため、シートを見た歩行者は直感的にこれを回避することができると考えられる。シートには大きさの異なる人の形に加工したELシートを6枚使用し、曲がり角に近づくにつれ人の形が大きくなるようにしてある。この人の大きさの拡大率は、より接近感を感じる値を実験によって求めている。移動障害物の接近を知らせる対象が人間であることが本研究の目的とは違っているが、知らせる対象を自動走行可能な移動体にすることも原理的には可能である。この研究の手法は、本研究の提案手法である自律移動する拡張型センサーを使うのに対して、環境設置型のセンサーで問題を解決するものである。ただし、環境設置型センサーと本研究の提案手法にはそれぞれに長所と短所があるため、SUVが取得する情報と併せて使うことで、より安全な自動走行が可能になると思われる。そのため、この研究成果を将来的に本研究に採り入れることも検討すべきである。
6.4 見通し不良区間安全走行支援に関する研究
松本らは、車の運転において見通しの悪いカーブでの交通事故を減らすための支援システムを提案している[29]。見通しの悪いカーブは交通事故多発箇所であり、このような道路を走行する際に注意すべき点として、カーブ先に停止している車両や、すれ違う対向車などがある。事前に前方の状況を認識していれば、運転者は余裕を持ってこれらを回避することが可能となる。そこで、この研究では見通しの悪いカーブからなる道路を画像センサーで監視し、その監視映像を画像処理することで、システムが自動的に対向車や障害物(停止・低速車、落下物)を検知する。その検知内容を、表示装置で、見通し不良区間の直前に置き、運転手はそれを見ることで、対向車線や停止車両に対し特に注意を向けながら運転することができる。本研究では、環境設置型のセンサーの設置はインフラへのコストが高いとして、自律移動が可能な外部拡張センサーとしてのSUVの研究を行った。しかし、この研究では前節の研究と同じく、交通事故多発する箇所を限定することで、その設置コストに対しての問題に対して解決を図っている。屋内の通路や屋外の歩道は、車道よりも複雑な形状で危険な場所を完全に限定することは難しいが、人通りの多い交差点などに限定して環境設置型のセンサーを置くことは今後考えられる解決策の一つである。
7 まとめと今後の課題・応用
7.1 まとめ
本研究の主な成果は以下の3点である。
• 移動体間のセンシング領域を統合するための基礎技術の開発と各要素技術の検証
•センシング領域の統合に基づく移動体間の連携を用いた安全な自動走行の実現
• シミュレーションによる提案手法の評価実験
それぞれについて詳しく説明する。
移動体間のセンシング領域を統合するための基礎技術の開発と各要素技術の検証
3章において、環境地図の生成・自己位置推定・自動走行の仕組みについて説明した。これらの要素技術を組み合わせることで、移動体間のセンシング情報を統合することが可能となる。また、各要素技術に関しての精度を実験によって検証した。環境地図の占有格子地図を生成する手法は、1% 以内の誤差で障害物情報の位置関係を表した地図を作成できることを確認した。また、自己位置を推定する手法、移動体の位置を環境地図上の座標で10cm程度の誤差以内で安定して推定できることを確認した。さらに、環境地図内で作成した経路を自動走行する仕組みについては、壁などの障害物にぶつかることなく平均で7cm程度の誤差で目的地に到着できることを確認した。これら各要素技術の検証実験の結果より、センシング情報の統合に関する精度についてもおおよそ妥当であると言える。
センシング領域の統合に基づく移動体間の連携を用いた安全な自動走行の実現
SUVをATの経路前方に走らせることで、ATの死角から接近する移動障害物を認識する仕組みを提案し、実機を用いて実現した。また4.1節では、この手法の鍵となる注意区間を検出する技術について提案し、実験によって高い精度で検出が可能であることを検証した。この注意区間をSUVに低速で走らせることによって、ATの安全性を高めるために特に重要である情報を取得することが可能となり、またSUV自身の移動障害物回避に役立たせることができる。
シミュレーションによる、安全自動走行に関する提案手法の評価実験
提案手法によって安全性がどの程度向上するかを検証するために、シミュレータを作成して、それを用いて実験を行った。5.2節の実験によって、SUVと連携走行することによってATは移動障害物の認識を平均3.3秒早められることが分かり、また、回避困難な危険な状況へ遭遇する確率を、ATが単独で走行する場合に比べて25.2% 減らせることが分かった。5.3節の実験では、経路中に含まれる14.5% 程度の注意区間において91.0% の危険な状況が発生することが分かった。5.4節の実験では、ATとSUVの間隔を6mにして連携走行することにより、自動走行時の平均速度をほとんど下げることなく安全性を高められることが分かった。
7.2 今後の課題・応用
本研究で得た成果を利用することによる、SUVの今後の課題および応用の可能性について5点述べる。
7.2.1 注意区間検出アルゴリズムの改良
本研究ではATの経路上の前方をSUVに走らせることでATの安全性を高める手法を実現した。その応用としてATの代わりに、歩行者の前方をSUVに走らせることで、歩行者の安全性を高める手法が考えられる。しかし、SUVは事前に歩行者の目的地までの経路を知っていないと歩行者を先行できないため、歩行者が経路を自由に決める状況ではSUVを利用することは困難である。
そこで、歩行者は目的地だけを決め、SUVを案内ロボットとして使用する状況を想定する。例えば、美術館やショッピングモールなど歩行者にとって地図が把握できてない施設において、歩行者はSUVを呼び、目的地を伝える。目的地までの経路はSUVが決め、歩行者は目的地までの経路を知ることができ、かつSUVによって安全に走行することができる。SUVに目的地を伝え、SUVのセンシングした情報を知る手段としては、現在研究を行っている三次元地図を使用する[11]。この三次元地図は、SUVに搭載されたKinectの深度情報とカメラ情報よって生成された、環境内の立体的な地図である。3章で説明した占有格子地図と異なり、環境内の画像をテクスチャとして立体的な地図にマッピングしているため、人間にとって直感的で分かりやすいものになっている。さらに、この地図には環境内の特徴的な地点の情報(例えば美術館ならば絵画情報)がアノテーションされているため、歩行者はより容易に行き先を決めることができる。この三次元地図を用いて目的地をSUVに伝え、案内を開始した後に三次元地図上にSUVの取得したセンサーの情報を反映させることで、歩行者は安全に、かつ目的地まで容易に到着することが可能となる。今後このような手法でSUVを利用することで、本研究の連携走行による安全性の向上の仕組みを活かすことができる。
7.2.2 回避行動アルゴリズムの改善と評価
本研究の提案手法では、SUVが注意区間で移動障害物を検出すると、SUVが移動障害物を回避するために進行方向と逆の方向に移動し、ATは移動障害物が通り過ぎるまで停止する。遭遇した移動障害物が1つである場合は、従来の回避手法より確実に回避できる仕組みではあるが、環境内に複数の移動障害物が存在する場合は、それらを同時に回避するのは依然として困難である。回避動作のアルゴリズムを改良して、複数の移動障害物に対しても回避できる仕組みを実現するのが今後の課題の一つである。また、SUVと連携走行することによって、ATは移動障害物をより早く認識し、危険な状況を回避することができるのは、5章の実験によって危険な状況の発生頻度を計測することで確認している。しかし、移動障害物の動作の仕様では、目的地に対する最短経路を進み続けるため、実際に複数の移動障害物が存在する状況を考慮していない。実際の環境では、移動障害物は他の移動障害物の位置と進行方向を考慮して自身の経路を決める。シミュレータ内で複数の移動障害物が相互に影響しあって移動する環境をシミュレートすることで、複数の移動障害物を回避する動作について実験することも今後の課題の一つとなる。
7.2.3 案内ロボットとしてのSUV
本研究ではATの経路上の前方をSUVに走らせることでATの安全性を高める手法を実現した。その応用としてATの代わりに、歩行者の前方をSUVに走らせることで、歩行者の安全性を高める手法が考えられる。しかし、SUVは事前に歩行者の目的地までの経路を知っていないと歩行者を先行できないため、歩行者が経路を自由に決める状況ではSUVを利用することは困難である。そこで、歩行者は目的地だけを決め、SUVを案内ロボットとして使用する状況を想定する。例えば、美術館やショッピングモールなど歩行者にとって地図が把握できてない施設において、歩行者はSUVを呼び、目的地を伝える。目的地までの経路はSUVが決め、歩行者は目的地までの経路を知ることができ、かつSUVによって安全に走行することができる。SUVに目的地を伝え、SUVのセンシングした情報を知る手段としては、現在研究を行っている三次元地図を使用する[11]。この三次元地図は、SUVに搭載されたKinectの深度情報とカメラ情報よって生成された、環境内の立体的な地図である。3章で説明した占有格子地図と異なり、環境内の画像をテクスチャとして立体的な地図にマッピングしているため、人間にとって直感的で分かりやすいものになっている。さらに、この地図には環境内の特徴的な地点の情報(例えば美術館ならば絵画情報)がアノテーションされているため、歩行者はより容易に行き先を決めることができる。この三次元地図を用いて目的地をSUVに伝え、案内を開始した後に三次元地図上にSUVの取得したセンサーの情報を反映させることで、歩行者は安全に、かつ目的地まで容易に到着することが可能となる。今後このような手法でSUVを利用することで、本研究の連携走行による安全性の向上の仕組みを活かすことができる。
7.2.4 飛行型SUV
SUVによってATが安全に自動走行できる仕組みを実現し、実験によってそれを検証した。しかし、SUVと移動障害物の衝突については、注意区間で減速するため回避が比較的容易ではあるが確実とは言えない。それに対する具体的な解決策として、SUVが空を飛ぶことで障害物との衝突を回避する方法について、今後の課題として述べる。空中には移動障害物が存在せず、地上よりも自由に移動することができるので拡張型センサーとして地上より空中の方が適切である。人間を乗せて空中を移動できるような乗り物はまだかなり実現が困難であるが、空を飛ぶ小型の移動体はすでに実現されている。パロット社の「AR.Drone」は空中で静止状態を持続することができる移動体である。旋回、上昇下降、全方位移動など柔軟な移動ができる。しかし、AR.Droneは飛んでいる間は常にエネルギーを消費するので、常時飛び続けることは難しい。その問題の解決法として、通常時は空中用のSUVは地上用のSUVの上に設置されており、環境を偵察する必要がある時に分離して飛行する方法を想定している(図7.1)。また、一つの移動体で、地上走行と空中走行を切り替えられる移動体の研究が防衛省で行われている[http://www.afpbb.com/article/environment-science-it/science-technology/2818504/7603912]。この研究では形状が球体で、空を飛ぶ時は内部のプロペラで飛行し、着陸した後は転がりながら地上を進む。今後このような移動体の研究が発展することによって、空中用SUVの実用性が高まり、本研究成果の利用価値がさらに上がると思われる。
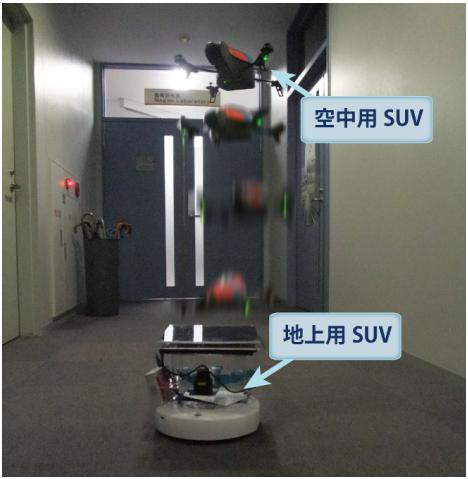
図7.1: 地上用小型無人移動体と空中用小型無人移動体の連携
7.2.5 環境インフラとしてのSUV
本研究では、SUVを自律移動するセンサーとしてATに従属した形で利用したが、SUVの自律移動型センサーとしての機能を特定のATとは独立に用い、他の問題の解決手段として用いることが、今後の応用として考えられる。その一つが環境情報を取得するためのインフラとしてSUVを利用することである。環境情報は時間とともに変化する。具体的には、ショッピングモールでの店内の混雑具合や、オフィスでの在室状況などである。そのような環境情報はATに限らず様々な場面で利用することができる。具体的には、無駄な行動を減らして、効率的に目的地を決めることなどである。先の例で言えば、ショッピングモールでは、混んでいる店に行くのを後回しにしたり、オフィスでは、会いに行きたい人が現在どの部屋に在室しているか調べてから、行き先を決めることができる。そこで、複数のSUVに環境内を巡回させることで、このような環境情報を収集することが考えられる。筆者の所属する研究室ではすでに、環境インフラとしてのSUVの研究も同時に進めている[18]。この研究では、動的に変わる環境の、特に道を塞ぐ障害物をSUVによってセンシングすることについて研究している。それは具体的には次のようなものである。複数のSUVが環境内を自律的に巡回し、障害物によってATが走行不可能な場所を検出した場合に、環境内の移動体や障害物の位置などを統合的に管理する地図サーバーに情報を送信する。その情報をオンデマンドに取得し、ATは自動走行中に、経路を動的に変更することで、自動走行の効率化を実現する。しかし、この研究でセンシングする情報は、レーザーレンジセンサーによる距離データのみであるので、先ほどのショッピングモールやオフィスの例を実現することは依然として困難である。今後は様々なセンサーや認識技術を用いて、取得する情報を増やすことが課題である。具体的には音声データ、画像データ、3次元の距離データなどがある。また、先に紹介した環境インフラとしてのSUVの研究では、SUVが時々刻々変化する環境の情報をどの程度の精度で検知できるかを実験するシミュレータを開発した。それにより、効率的に環境情報をセンシングすることができるための、環境に分散的に巡回させるSUVの台数が明らかになっている。それらの情報を用いて、環境インフラとしてのSUVについての機能をより高度化するのが今後の課題である。